PyTorch 1.x 常用知识
PyTorch 1.x常用知识
- 1. 简介
-
- 1.1 基本概念
- 1.2 检查GPU是否可用
- 1.3 设置使用的GPU (TensorFlow与PyTorch相同
- 1.4 测量GPU的计算速度
- 1.5 tqdm
- 2. Tensor
-
- 2.1 Tensor API分类
- 2.2 创建Tensor的常用方法
- 2.3 Tensor属性
- 2.4 torch.Tensor与troch.tensor的区别
- 2.5 修改Tensor形状
- 2.6 torch.view 与 torch.reshape 的区别
- 2.7 索引操作
- 2.8 Tensor与Numpy相互转化
- 2.9 PyTorch与Numpy比较
- 2.10 把Tensor放入cuda或cpu
- 2.11 torch.Tensor.permute
- 2.12 torch.Tensor.view
- 3. 自动微分(autograd)
-
- 3.1 自动微分
- 3.2 张量求导
- 3.3 梯度
- 4. 模型序列化
-
- 4.1 torch.save和torch.load定义
- 4.2 序列化模型
-
- 4.2.1 保存和加载整个模型
- 4.2.2 仅保存和加载模型参数
- 5. 模型的参数及扩展名
-
- 5.1 模型
- 5.2 model.state_dict()
- 5.3 optimizer.state_dict()
- 5.4 model.parameters()
- 5.5 model.named_parameters()
- 6. Torch函数
-
- 6.1 torch.unsqueeze
- 6.2 torch.squeeze
- 6.3 torch.Tensor扩展数据维度
-
- 6.3.1 expand
- 6.3.2 repeat
- 7. softmax
- 参考
1. 简介
1.1 基本概念
- PyTorch的定义
- PyTorch是一个基于Torch的Python开源机器学习库,用于自然语言处理等应用程序。它由Facebook的AI组开发
- 主要特点
- 不仅能够 实现强大的GPU加速,同时还支持动态神经网络,这一点是现在很多主流框架如ensorFlow都不支持的
- PyTorch提供了两个高级功能:
- 具有强大的GPU加速的
n维张量计算(类似于numpy, 但可运行在GPU上) - 包含自动求导系统的深度神经网络
- 具有强大的GPU加速的
- PyTorch应用
- 除了Facebook之外,Twitter、GMU和Salesforce等机构都采用了PyTorch
- Numpy与Tensor
- Numpy把ndarray放在CPU中进行计算
- Torch把Tensor放在GPU中进行加速运算
1.2 检查GPU是否可用
- shell命令
nvidia-smi
- 示例
import torch
import time
print(torch.__version__)
print(torch.cuda.is_available())
flag = torch.cuda.is_available()
if flag:
print("CUDA可使用")
else:
print("CUDA不可用")
ngpu= 1
# Decide which device we want to run on
device = torch.device("cuda:0" if (torch.cuda.is_available() and ngpu > 0) else "cpu")
print("驱动为:",device)
print("GPU型号: ",torch.cuda.get_device_name(0))
1.3 设置使用的GPU (TensorFlow与PyTorch相同
os.environ[“CUDA_DEVICE_ORDER”] = “PCI_BUS_ID” # 按照PCI_BUS_ID顺序从0开始排列GPU设备
os.environ[“CUDA_VISIBLE_DEVICES”] = “0” #设置当前使用的GPU设备仅为0号设备 设备名称为'/gpu:0'
os.environ[“CUDA_VISIBLE_DEVICES”] = “1” #设置当前使用的GPU设备仅为1号设备 设备名称为'/gpu:0'
os.environ[“CUDA_VISIBLE_DEVICES”] = “0,1” #设置当前使用的GPU设备为0,1号两个设备,名称依次为'/gpu:0'、'/gpu:1'
os.environ[“CUDA_VISIBLE_DEVICES”] = “1,0” #设置当前使用的GPU设备为1,0号两个设备,名称依次为'/gpu:0'、'/gpu:1'。表示优先使用1号设备,然后使用0号设备
os.environ[“CUDA_VISIBLE_DEVICES”] = “-1” # 禁用GPU
1.4 测量GPU的计算速度
- 示例
a = torch.randn(10000, 1000)
b = torch.randn(1000, 2000)
t0 = time.time()
c = torch.matmul(a, b)
t1 = time.time()
print(a.device,",time=", t1 - t0, c.norm(2))
device = torch.device('cuda')
a = a.to(device)
b = b.to(device)
t0 = time.time()
c = torch.matmul(a, b)
t2 = time.time()
print(a.device,",time=", t2 - t0, c.norm(2))
t0 = time.time()
c = torch.matmul(a, b)
t2 = time.time()
print(a.device,",time=", t2 - t0, c.norm(2))
- 输出
cpu ,time= 0.1700434684753418 tensor(141028.5938)
cuda:0 ,time= 0.006982564926147461 tensor(141429.7656, device='cuda:0')
cuda:0 ,time= 0.0 tensor(141429.7656, device='cuda:0')
1.5 tqdm
- dm 是一个快速,可扩展的Python进度条,可以在 Python 长循环中添加一个进度提示信息,用户只需要封装任意的迭代器 tqdm(iterator)
- 它是用来显示进度条的,很漂亮,使用很直观(在循环体里边加个tqdm),而且基本不影响原程序效率
- 示例
import time
from tqdm import tqdm
for i in tqdm(range(10000)):
time.sleep(0.01)
2. Tensor
2.1 Tensor API分类
-
从接口角度分类:
- torch.function:如torch.sum, torch.add
- tensor.function:如tensor.view, tensor.add
-
从输出角度分类:
- 不修改参与计算的数据,返回结果:如
x.add(y),x值不变,返回一个新的Tensor - 修改参与计算的数据:如
x.add_(y),运算结果保存在x中,即x被修改
- 不修改参与计算的数据,返回结果:如
-
示例
-
输出
import torch
x=torch.tensor([1,2])
y=torch.tensor([3,4])
z=x.add(y)
print(z)
print(x)
x.add_(y)
print(x)
tensor([4, 6])
tensor([1, 2])
tensor([4, 6])
2.2 创建Tensor的常用方法
- 这些创建方法都可以在创建的时候指定数据类型dtype和存放device(cpu/gpu)
| 函数 | 功能 |
|---|---|
| Tensor(*size) | 创建指定大小的Tensor |
| tensor(data) | torch.tensor(data, dtype=None, device=None, requires_grad=False, pin_memory=False)使用类似np.array的已存在的数据构造tensor |
| ones(*size) | 全1张量 |
| ones_like(t) | |
| zeros(*size) | 全0张量 |
| zeros_like(t) | |
| eye(*size) | 对角线 1,其它为0 |
| arange(start,end,step) | 从start到end,步长为step |
| linspace(start,end,num) | 从start到end, 均分为成num份 |
| rand/randn(*size) | 生成[0,1)均与分布/标准正态分布 |
| from_numpy(ndarray) |
- 示例
# 使用数据构造Tensor
print('使用数据构造Tensor:')
print(torch.tensor((3,5)))
print(torch.tensor([3,5]))
print(torch.tensor(3))
print(torch.tensor([[0.1, 1.2], [2.2, 3.1], [4.9, 5.2]]))
torch.tensor([[0.11111, 0.222222, 0.3333333]],
dtype=torch.float64,
device=torch.device('cuda:0'))# creates a torch.cuda.DoubleTensor
print(torch.Tensor((3,5)))
print(torch.Tensor([3,5]))
# 使用size构造Tensor
print('')
print('使用size构造Tensor:')
print(torch.Tensor(3,5))
a = torch.eye(3,2)
print(a)
print(torch.ones(3,4))
print(torch.ones_like(a))
print(torch.zeros(3,4))
print(torch.zeros_like(a))
print(torch.arange(1,9,1))
print(torch.arange(1,9,2))
print(torch.linspace(1,9,2))
print(torch.linspace(1,9,3))
print(torch.rand(3,3))
print(torch.randn(3,3))
b = np.ones((3,2))
print('b=\n',b)
print(torch.from_numpy(b))
- 输出
使用数据构造Tensor:
tensor([3, 5])
tensor([3, 5])
tensor(3)
tensor([[0.1000, 1.2000],
[2.2000, 3.1000],
[4.9000, 5.2000]])
tensor([3., 5.])
tensor([3., 5.])
使用size构造Tensor:
tensor([[9.2755e-39, 8.9082e-39, 9.9184e-39, 8.4490e-39, 9.6429e-39],
[1.0653e-38, 1.0469e-38, 4.2246e-39, 1.0378e-38, 9.6429e-39],
[9.2755e-39, 9.7346e-39, 1.0745e-38, 1.0102e-38, 9.9184e-39]])
tensor([[1., 0.],
[0., 1.],
[0., 0.]])
tensor([[1., 1., 1., 1.],
[1., 1., 1., 1.],
[1., 1., 1., 1.]])
tensor([[1., 1.],
[1., 1.],
[1., 1.]])
tensor([[0., 0., 0., 0.],
[0., 0., 0., 0.],
[0., 0., 0., 0.]])
tensor([[0., 0.],
[0., 0.],
[0., 0.]])
tensor([1, 2, 3, 4, 5, 6, 7, 8])
tensor([1, 3, 5, 7])
tensor([1., 9.])
tensor([1., 5., 9.])
tensor([[0.3097, 0.1510, 0.7616],
[0.8383, 0.1241, 0.3029],
[0.1397, 0.2673, 0.7836]])
tensor([[ 0.1529, -1.7908, -0.8428],
[ 0.9294, 0.1580, 0.7887],
[-1.2041, -0.0892, 0.7441]])
b=
[[1. 1.]
[1. 1.]
[1. 1.]]
tensor([[1., 1.],
[1., 1.],
[1., 1.]], dtype=torch.float64)
2.3 Tensor属性
- size()/shape: 输出张量的维度
- dtype:查看张量的数据类型
- 示例
a = torch.tensor([[1,2,3], [4,5,6]])
print(a)
print(a.size())
print(a.shape)
print(a.dtype)
- 输出
tensor([[1, 2, 3],
[4, 5, 6]])
torch.Size([2, 3])
torch.Size([2, 3])
torch.int64
[[1 2 3]
[4 5 6]]
2.4 torch.Tensor与troch.tensor的区别
- torch.Tensor是torch.empty 和 torch.tensor 之间的混合。传入数据时,torch.Tensor使用全局默认dtype(FloatTensor),而torch.tensor是从数据中推断数据类型
- torch.tensor(1)返回的是固定值1;torch.Tensor返回的是大小为1的张量
- 示例
print(torch.tensor(1))
print(torch.Tensor(1))
- 输出
tensor(1)
tensor([0.])
2.5 修改Tensor形状
| 函数 | 功能 |
|---|---|
| size() | 计算张量属性值,与shape等价 |
| numel(input) | 算张量的元素个数 |
| view(*shape) | 修改张量的shape,共享内存,修改一个同时修改 |
| resize() | 类似于view |
| item | 返回标量 |
| unsqueeze | 在指定维度增加一个1 |
| squeeze | 在指定维度压缩一个1 |
- 示例
x = torch.randn(2,3)
print('Size:', x.size())
print('Shape:', x.shape)
print('维度:', x.dim()) # 维度
print("这里把x展为1维向量:", x.view(-1))
print('x=',x)
y = x.view(-1)
z=torch.unsqueeze(y,0)
print('z=',z)
print("没增加维度前:",y," 的维度",y.dim())
print("增加一个维度:", z)
print("z的维度:", z.dim())
print("z的个数:", z.numel())
- 输出
Size: torch.Size([2, 3])
Shape: torch.Size([2, 3])
维度: 2
这里把x展为1维向量: tensor([ 0.3224, 1.4193, -0.4853, -0.6055, -1.1936, -0.6693])
x= tensor([[ 0.3224, 1.4193, -0.4853],
[-0.6055, -1.1936, -0.6693]])
z= tensor([[ 0.3224, 1.4193, -0.4853, -0.6055, -1.1936, -0.6693]])
没增加维度前: tensor([ 0.3224, 1.4193, -0.4853, -0.6055, -1.1936, -0.6693]) 的Size 1
增加一个维度: tensor([[ 0.3224, 1.4193, -0.4853, -0.6055, -1.1936, -0.6693]])
z的维度: 2
z的个数: 6
2.6 torch.view 与 torch.reshape 的区别
- reshape()可以由torch.reshape()或者torch.Tensor.reshape()调用;而view()只可以由torch.Tensor.view()调用
- 新的size必须与原来的size与stride兼容,否则,在view之前必须调用contiguous()方法
- 同样返回数据量相同的但形状不同的Tensor,若满足view条件,则不会copy,若不满足,就copy
- 只想重塑,就使用torch.reshape,如果考虑内存并共享,就用torch.view
2.7 索引操作
| 函数 | 功能 |
|---|---|
| index_select(input,dim,index) | 在指定维度上选择列或者行 |
| nonzero(input) | 获取非0元素的下标 |
| masked_select(input,mask) | 使用二元值进行选择 |
| gather(input,dim,index) | 指定维度选择数据,输出形状与index一致 |
| scatter_(input,dim,index,src | gather的反操作,根据指定索引补充数据 |
- 示例
# 设置一个随机种子
torch.manual_seed(100)
print(torch.manual_seed(100))
x = torch.randn(2,3)
print(x)
# 索引获取第一行所有数据x[0,:]
print('x[0,:]=',x[0,:])
# 获取最后一列的数据x[:,-1]
print('x[:,-1]=',x[:,-1])
# 生成是否大于0的张量
mask= x>0
print('mask=',mask)
# 获取大于0的值
torch.masked_select(x,mask)
print('torch.masked_select(x,mask)=',torch.masked_select(x,mask))
# 获取非0下标,即行、列的索引
torch.nonzero(mask)
print('torch.nonzero(mask)=',torch.nonzero(mask))
# 获取指定索引对应的值,输出根据以下规则得到# out[i][j] = input[index[i][j][j]] # 如果 if dim == 0# out[i][j] = input[i][index[i][j]] # 如果 if dim == 1
index = torch.LongTensor([[0,1,1]])
print(index)
torch.gather(x,0,index)
print('torch.gather(x,0,index)=',torch.gather(x,0,index))
index=torch.LongTensor([[0,1,1],[1,1,1]])
a = torch.gather(x,1,index)
print("a: ",a)
# 把a的值返回到2x3的0矩阵中
z = torch.zeros(2,3)
z.scatter_(1,index,a)
print('z=',z)
- 输出
<torch._C.Generator object at 0x000001E43F784170>
tensor([[ 0.3607, -0.2859, -0.3938],
[ 0.2429, -1.3833, -2.3134]])
x[0,:]= tensor([ 0.3607, -0.2859, -0.3938])
x[:,-1]= tensor([-0.3938, -2.3134])
mask= tensor([[ True, False, False],
[ True, False, False]])
torch.masked_select(x,mask)= tensor([0.3607, 0.2429])
torch.nonzero(mask)= tensor([[0, 0],
[1, 0]])
tensor([[0, 1, 1]])
torch.gather(x,0,index)= tensor([[ 0.3607, -1.3833, -2.3134]])
a: tensor([[ 0.3607, -0.2859, -0.2859],
[-1.3833, -1.3833, -1.3833]])
z= tensor([[ 0.3607, -0.2859, 0.0000],
[ 0.0000, -1.3833, 0.0000]])
2.8 Tensor与Numpy相互转化
- Numpy=>Tensor:
torch.from_numpy() - Tensor=>Numpy:
tensor.numpy() - 注:这两个函数所产生的的 Tensor 和NumPy中的数组共享相同的内存(所以他们之间的转换很快),改变其中⼀个时另⼀个也会改变
- 示例
a = torch.ones(2,3)
b = a.numpy()
print(a)
print(b)
a += 1
print(a)
print(b)
a = np.ones((2,3))
b = torch.from_numpy(a)
print(a)
print(b)
a += 5
print(a)
print(b)
- 输出
tensor([[1., 1., 1.],
[1., 1., 1.]])
[[1. 1. 1.]
[1. 1. 1.]]
tensor([[2., 2., 2.],
[2., 2., 2.]])
[[2. 2. 2.]
[2. 2. 2.]]
##
[[1. 1. 1.]
[1. 1. 1.]]
tensor([[1., 1., 1.],
[1., 1., 1.]], dtype=torch.float64)
[[6. 6. 6.]
[6. 6. 6.]]
tensor([[6., 6., 6.],
[6., 6., 6.]], dtype=torch.float64)
2.9 PyTorch与Numpy比较
| np.ndarry([3.2,4.3],dtype=np.float16) | torch.tensor([3.2,4.3], dtype=torch.float16 |
|---|---|
| x.copy() | x.clone() |
| np.dot | torch.mm |
| x.ndim | x.dim |
| x.size | x.nelement() |
| x.reshape | x.reshape / x.view |
| x.flatten | x.view(-1) |
| np.floor(x) | torch.floor(x), x.floor() |
| np.less | x.lt |
| np.random.seed | torch.manual_seed |
2.10 把Tensor放入cuda或cpu
- 把Tensor copy到CUDA内存
torch.Tensor.cuda(device=None, non_blocking=False, memory_format=torch.preserve_format) → Tensor
- 把Tensor copy到CPU内存
torch.Tensor.cpu(memory_format=torch.preserve_format) → Tensor
2.11 torch.Tensor.permute
- 功能
- 返回维度重新排列的张量视图,张量数据不变
- 定义
permute(*dims) → Tensor # *dims (int...): 指定的维度顺序
- 示例代码
import torch
x = torch.randn(2, 3, 5)
print(x.shape)
y = x.permute(2, 0, 1)
print(y.shape)
#torch.Size([2, 3, 5])
#torch.Size([5, 2, 3])
2.12 torch.Tensor.view
- 功能
- 返回一个新的张量,其数据与原张量相同,但形状不同
- 定义
view(*shape) → Tensor
- 示例代码
x = torch.randn(4, 4)
print(x.shape)
y = x.view(16)
print(y.shape)
z = x.view(-1, 8) # the size -1 is inferred from other dimensions
print(z.shape)
# torch.Size([4, 4])
# torch.Size([16])
# torch.Size([2, 8])
a = torch.randn(1, 2, 3, 4)
print(a.shape)
c = a.view(1, 3, 2, 4)
print(c.shape)
# torch.Size([1, 2, 3, 4])
# torch.Size([1, 3, 2, 4])
3. 自动微分(autograd)
3.1 自动微分
-
目标:求 f ( x ; w , b ) f(x;w,b) f(x;w,b)在 x = 1 , w = 0 , b = 0 x=1, w=0, b=0 x=1,w=0,b=0处的导数
f ( x ; w , b ) = 1 e − ( w x + b ) + 1 f(x;w,b) = \frac{1}{e^{-(wx+b)} + 1} f(x;w,b)=e−(wx+b)+11 -
方法:利用链式法则来自动计算一个复合函数的梯度
-
计算图:
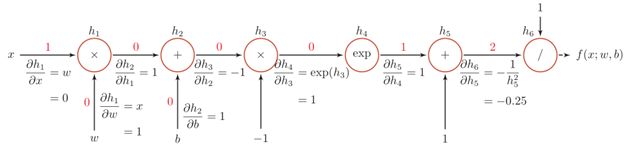
-
复合函数 f ( x ; w , b ) f(x;w,b) f(x;w,b)的6个基本函数及其导数
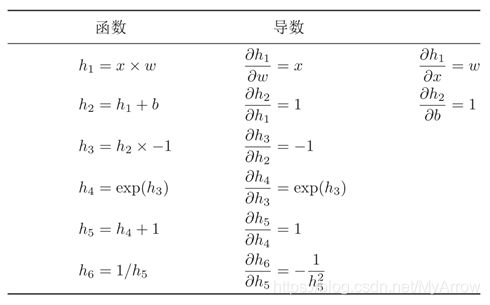
-
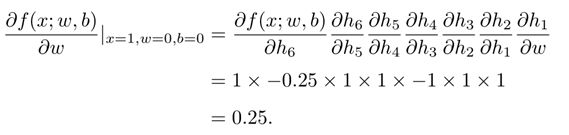
当 x = 1 , w = 0 , b = 0 x=1, w=0, b=0 x=1,w=0,b=0时,可以得到:
3.2 张量求导
- 示例1
# 加入requires_grad=True参数可追踪函数求导
x = torch.ones(2,2,requires_grad=True)
print(x)
print(x.grad_fn)
- 输出1
tensor([[1., 1.],
[1., 1.]], requires_grad=True)
None
- 示例2
# 进行运算
y = x+2
print(y)
print(y.grad_fn)
# 像x这种直接创建的称为叶子节点,叶子节点对应的 grad_fn 是 None
print(x.is_leaf,y.is_leaf)
- 输出2
tensor([[3., 3.],
[3., 3.]], grad_fn=<AddBackward0>)
<AddBackward0 object at 0x000001E42FDFF7F0>
True False
3.3 梯度
- 现在让我们反向传播:因为out包含单个标量,out.backward()所以等效于out.backward(torch.tensor(1.))
- 示例
x = torch.ones(2,2,requires_grad=True)
y = x+2
z = y * y * 3
out = z.mean()
print(z,out)
a = out.backward()
print(x.grad)
print(a)
# 再来反向传播⼀次,注意grad是累加的
print("")
out2 = x.sum()
out2.backward()
print("x.grad=",x.grad)
print("")
out3 = x.sum()
# x.grad.data.zero_()
out3.backward()
print("x.grad=",x.grad)
- 输出
tensor([[27., 27.],
[27., 27.]], grad_fn=<MulBackward0>) tensor(27., grad_fn=<MeanBackward0>)
tensor([[4.5000, 4.5000],
[4.5000, 4.5000]])
None
x.grad= tensor([[5.5000, 5.5000],
[5.5000, 5.5000]])
x.grad= tensor([[6.5000, 6.5000],
[6.5000, 6.5000]])
4. 模型序列化
| API | 功能描述 |
|---|---|
| torch.save | 保存一个对象到读盘文件 |
| torch.load | 从一个torch.save保存的文件中加载对象 |
4.1 torch.save和torch.load定义
- torch.save
save(obj, # saved object
f, # file name
pickle_module=pickle, # module used for pickling metadata and objects
pickle_protocol=DEFAULT_PROTOCOL, #can be specified to override the default protocol
_use_new_zipfile_serialization=True)
- torch.load
load(f, # file name
map_location=None, # a function, torch.device, string or a dict specifying how to remap storage locations
pickle_module=pickle, # module used for unpickling metadata and objects (has to match the pickle_module used to serialize file)
**pickle_load_args) # (Python 3 only) optional keyword arguments passed over to pickle_module.load()
4.2 序列化模型
4.2.1 保存和加载整个模型
torch.save(the_model, 'model.pkl')
the_model = torch.load('model.pkl')
4.2.2 仅保存和加载模型参数
# save
torch.save(the_model.state_dict(), 'params.pkl')
# load
the_model = TheModelClass(*args, **kwargs)
the_model.load_state_dict(torch.load('params.pkl'))
5. 模型的参数及扩展名
- 参数:
- model.state_dict()
- model.parameters()
- model.named_parameters()
- 以上三个方法都可以查看Module的参数信息,用于更新参数,或者用于模型的保存
- 模型文件扩展名:
- .pt
- .pth
- .pkl
- 这三种文件格式一样,只是文件后缀名不同而已
5.1 模型
import torch
import torch.nn.functional as F
from torch.optim import SGD
class MyNet(torch.nn.Module):
def __init__(self):
super(MyNet, self).__init__() # 第一句话,调用父类的构造函数
self.conv1 = torch.nn.Conv2d(3, 32, 3, 1, 1)
self.relu1=torch.nn.ReLU()
self.max_pooling1=torch.nn.MaxPool2d(2,1)
self.conv2 = torch.nn.Conv2d(3, 32, 3, 1, 1)
self.relu2=torch.nn.ReLU()
self.max_pooling2=torch.nn.MaxPool2d(2,1)
self.dense1 = torch.nn.Linear(32 * 3 * 3, 128)
self.dense2 = torch.nn.Linear(128, 10)
def forward(self, x):
x = self.conv1(x)
x = self.relu1(x)
x = self.max_pooling1(x)
x = self.conv2(x)
x = self.relu2(x)
x = self.max_pooling2(x)
x = self.dense1(x)
x = self.dense2(x)
return x
model = MyNet() # 构造模型
5.2 model.state_dict()
- 保存每一层对应的参数
- 只显示参数可训练的层(pool和BN层除外)
- 用途:1) 查看指定层的权值 2)模型保存
print(type(model.state_dict())) # 查看state_dict所返回的类型,是一个“顺序字典OrderedDict”
for param_tensor in model.state_dict(): # 字典的遍历默认是遍历 key,所以param_tensor实际上是键值
print(param_tensor,'\t',model.state_dict()[param_tensor].size())
'''
conv1.weight torch.Size([32, 3, 3, 3])
conv1.bias torch.Size([32])
conv2.weight torch.Size([32, 3, 3, 3])
conv2.bias torch.Size([32])
dense1.weight torch.Size([128, 288])
dense1.bias torch.Size([128])
dense2.weight torch.Size([10, 128])
dense2.bias torch.Size([10])
'''
5.3 optimizer.state_dict()
- 包含了优化器的状态以及被使用的超参数(如lr, momentum,weight_decay等)
optimizer = SGD(model.parameters(),lr=0.001,momentum=0.9)
for var_name in optimizer.state_dict():
print(var_name,'\t',optimizer.state_dict()[var_name])
'''
state {}
param_groups [{'lr': 0.001,
'momentum': 0.9,
'dampening': 0,
'weight_decay': 0,
'nesterov': False,
'params': [1412966600640, 1412966613064, 1412966613136, 1412966613208,
1412966613280, 1412966613352, 1412966613496, 1412966613568]
}]
'''
5.4 model.parameters()
- model.parameters()方法返回的是一个生成器generator,每一个元素是从开头到结尾的参数
- 与state_dict()比较:parameters没有对应的key名称,是一个由纯参数组成的generator,而state_dict是一个字典,包含了一个key
print(type(model.parameters())) # 返回的是一个generator
for para in model.parameters():
print(para.size()) # 只查看形状
'''
torch.Size([32, 3, 3, 3])
torch.Size([32])
torch.Size([32, 3, 3, 3])
torch.Size([32])
torch.Size([128, 288])
torch.Size([128])
torch.Size([10, 128])
torch.Size([10])
'''
5.5 model.named_parameters()
print(type(model.named_parameters())) # 返回的是一个generator
for para in model.named_parameters(): # 返回的每一个元素是一个元组 tuple
'''
是一个元组 tuple ,元组的第一个元素是参数所对应的名称,第二个元素就是对应的参数值
'''
print(para[0],'\t',para[1].size())
'''
conv1.weight torch.Size([32, 3, 3, 3])
conv1.bias torch.Size([32])
conv2.weight torch.Size([32, 3, 3, 3])
conv2.bias torch.Size([32])
dense1.weight torch.Size([128, 288])
dense1.bias torch.Size([128])
dense2.weight torch.Size([10, 128])
dense2.bias torch.Size([10])
'''
6. Torch函数
6.1 torch.unsqueeze
- 定义
torch.unsqueeze(input, dim, out=None)
- 功能
- 扩展维度
- 返回一个新的张量,对输入的既定位置插入维度 1
- 特性
- 返回张量与输入张量共享内存,所以改变其中一个的内容会改变另一个
- 只是维度增加,但元素个数和值不变
- 示例
x = torch.tensor([[1,2],[3,4]]) # [2,2]
print(x.shape)
y1 = torch.unsqueeze(x,0) # [1,2,2]
print(y1.shape)
y2 = torch.unsqueeze(x,1) # [2,1,2]
print(y2.shape)
print(x)
print(y1)
print(y2)
'''
torch.Size([2, 2])
torch.Size([1, 2, 2])
torch.Size([2, 1, 2])
tensor([[1, 2],
[3, 4]])
tensor([[[1, 2],
[3, 4]]])
tensor([[[1, 2]],
[[3, 4]]])
'''
- unsqueeze_和 unsqueeze 的区别
- unsqueeze_ 和 unsqueeze 实现一样的功能
- 区别在于 unsqueeze_ 是 in_place 操作,即 unsqueeze 不会对使用 unsqueeze 的 tensor 进行改变,想要获取 unsqueeze 后的值必须赋予给新值, unsqueeze_ 则会对自己改变
# unsqueeze
a = torch.Tensor([1, 2, 3, 4]) # [4]
b = torch.unsqueeze(a, 1) # [4,1]
print('a={}, a.shape={}'.format(a, a.shape))
print('b={}, b.shape={}'.format(b, b.shape))
'''
a=tensor([1., 2., 3., 4.]), a.shape=torch.Size([4])
b=tensor([[1.],
[2.],
[3.],
[4.]]), b.shape=torch.Size([4, 1])
'''
# unsqueeze_
a = torch.Tensor([1, 2, 3, 4]) # [4]
b = a.unsqueeze_(1) # [4,1]
print('a={}, a.shape={}'.format(a, a.shape))
print('b={}, b.shape={}'.format(b, b.shape))
'''
a=tensor([[1.],
[2.],
[3.],
[4.]]), a.shape=torch.Size([4, 1])
b=tensor([[1.],
[2.],
[3.],
[4.]]), b.shape=torch.Size([4, 1])
'''
6.2 torch.squeeze
- 定义
torch.squeeze(input, dim=None, out=None)
- 功能
- 降维
- 将输入张量形状中的1 去除并返回。 如果输入是形如(A×1×B×1×C×1×D),那么输出形状就为: (A×B×C×D)
- 当给定dim时,那么挤压操作只在给定维度上。例如,输入形状为: (A×1×B), squeeze(input, 0) 将会保持张量不变,只有用 squeeze(input, 1),形状会变成 (A×B)。
- 注意
- 返回张量与输入张量共享内存,所以改变其中一个的内容会改变另一个
m = torch.zeros(2, 1, 2, 1, 2)
print(m.size()) # torch.Size([2, 1, 2, 1, 2])
n = torch.squeeze(m)
print(n.size()) # torch.Size([2, 2, 2])
n = torch.squeeze(m, 0) # 当给定dim时,那么挤压操作只在给定维度上
print(n.size()) # torch.Size([2, 1, 2, 1, 2])
n = torch.squeeze(m, 1)
print(n.size()) # torch.Size([2, 2, 1, 2])
n = torch.squeeze(m, 2)
print(n.size()) # torch.Size([2, 1, 2, 1, 2])
n = torch.squeeze(m, 3)
print(n.size()) # torch.Size([2, 1, 2, 2])
6.3 torch.Tensor扩展数据维度
- torch.Tensor:是包含一种数据类型元素的多维矩阵
- torch.Tensor有两个实例方法可以用来扩展某维的数据的尺寸,分别是
- repeat()
- expand()
6.3.1 expand
- 定义
expand(*sizes) → Tensor
- 示例
x = torch.tensor([1, 2, 3])
xx = x.expand(2, 3)
print(x)
print(xx)
#tensor([1, 2, 3])
#tensor([[1, 2, 3],
# [1, 2, 3]])
6.3.2 repeat
- 功能:沿着特定的维度重复这个张量,和expand()不同的是,这个函数拷贝张量的数据
- 定义
repeat(*sizes) -> Tensor
- 示例
x = torch.tensor([1, 2, 3])
xx = x.repeat(3, 2)
print(x)
print(xx)
#tensor([1, 2, 3])
#tensor([[1, 2, 3, 1, 2, 3],
# [1, 2, 3, 1, 2, 3],
# [1, 2, 3, 1, 2, 3]])
7. softmax
- 定义
class torch.nn.Softmax(input, dim)
torch.nn.functional.softmax(input, dim)
-
参数
- dim:指明维度,dim=0表示按列计算;dim=1表示按行计算
-
功能
- 对n维输入张量运用Softmax函数,将张量的每个元素缩放到(0,1)区间且和为1
-
示例
import torch
import torch.nn.functional as F
x= torch.Tensor( [ [1,1,3,4],[1,2,3,4],[1,2,3,4]])
print(x)
b = F.softmax(x,0) #对每一列进行softmax
print(b)
c = F.softmax(x,1) #对每一行进行softmax
print(c)
'''
tensor([[1., 1., 3., 4.],
[1., 2., 3., 4.],
[1., 2., 3., 4.]])
tensor([[0.3333, 0.1554, 0.3333, 0.3333],
[0.3333, 0.4223, 0.3333, 0.3333],
[0.3333, 0.4223, 0.3333, 0.3333]])
tensor([[0.0339, 0.0339, 0.2507, 0.6815],
[0.0321, 0.0871, 0.2369, 0.6439],
[0.0321, 0.0871, 0.2369, 0.6439]])
'''
参考
- 《神经网络与深度学习》