turtlebot2笔记(更新中)
文章目录
- 1. 运行环境
- 2. 启动turtlebot2
- 3. turtlebot2的节点和话题
- 4. turtlebot2运动控制
-
- 4.1 键盘控制运动
- 4.2 代码控制运动
- 5. turtlebot2数据读取
-
- 5.1 里程计数据
- 5.2 IMU数据
- 6. turtlebot2仿真
-
- 6.1 仿真环境准备
- 6.2 开始仿真
- 7. 其他记录
-
- 数据发布频率
- 数据延迟
- 协方差
- 8. 参考
1. 运行环境
- Ubuntu 16.04
- ROS Kinetic
2. 启动turtlebot2
roslaunch turtlebot_bringup minimal.launch --screen
参数--screen可以将启动过程的详细信息输出到终端,可以不加。
3. turtlebot2的节点和话题
启动turtlebot2后查询话题
$ rostopic list
可以看到
/cmd_vel_mux/active
/cmd_vel_mux/input/navi
/cmd_vel_mux/input/safety_controller
/cmd_vel_mux/input/switch
/cmd_vel_mux/input/teleop
/cmd_vel_mux/parameter_descriptions
/cmd_vel_mux/parameter_updates
/diagnostics
/diagnostics_agg
/diagnostics_toplevel_state
/joint_states
/laptop_charge
/mobile_base/commands/controller_info
/mobile_base/commands/digital_output
/mobile_base/commands/external_power
/mobile_base/commands/led1
/mobile_base/commands/led2
/mobile_base/commands/motor_power
/mobile_base/commands/reset_odometry
/mobile_base/commands/sound
/mobile_base/commands/velocity
/mobile_base/controller_info
/mobile_base/debug/raw_control_command
/mobile_base/debug/raw_data_command
/mobile_base/debug/raw_data_stream
/mobile_base/events/bumper
/mobile_base/events/button
/mobile_base/events/cliff
/mobile_base/events/digital_input
/mobile_base/events/power_system
/mobile_base/events/robot_state
/mobile_base/events/wheel_drop
/mobile_base/sensors/bumper_pointcloud
/mobile_base/sensors/core
/mobile_base/sensors/dock_ir
/mobile_base/sensors/imu_data
/mobile_base/sensors/imu_data_raw
/mobile_base/version_info
/mobile_base_nodelet_manager/bond
/odom
博文turtlebot的mobile_base节点解析对这些节点有具体的说明。
运行以下命令:
$ rosrun rqt_graph rqt_graph
在rqt_graph界面进行以下操作:
- 选择显示所有活跃的节点和话题:Nodes/Topics(active)
- Namespaces改为0
- 取消勾选Dead sinks和Leaf topics
- 刷新页面
如下所示:

可以看到:
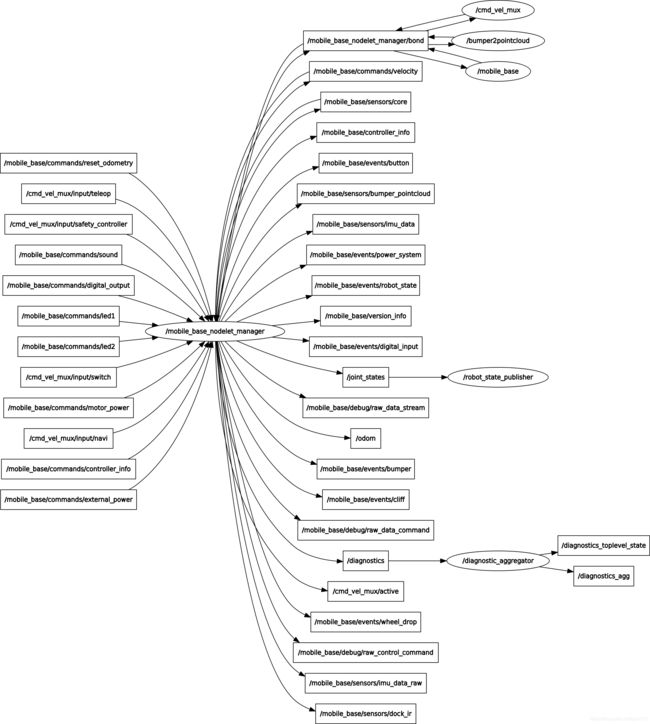
可知turtlebot2(或者说底盘Kobuki)的产生的主要节点是/mobile_base_nodelet_manager。
本文仅关心以下话题:
| 话题名 | message类型 | 说明 | 类型 |
|---|---|---|---|
| /mobile_base/commands/velocity | geometry_msgs::Twist | 设置预期速度,控制机器人移动 | 订阅 |
| /odom | nav_msgs::Odometry | 里程计信息 | 发布 |
| /mobile_base/sensors/imu_data | sensor_msgs::Imu | IMU信息 | 发布 |
4. turtlebot2运动控制
4.1 键盘控制运动
$ roslaunch turtlebot_teleop keyboard_teleop.launch

4.2 代码控制运动
#include geometry_msgs::Twist的结构如下,由三维线速度和三维角速度构成。
Vector3 linear
Vector3 angular
turtlebot2的坐标系为x轴指向前方,y轴指向左方,z轴指向上方,坐标系原点位于机器人中心在地面的投影,因此z坐标始终固定为0。
地面机器人只能前进后退,不能上升下降,也不能左右平移,因此只需要设置线速度的x分量;只能绕z轴旋转,不能俯仰和翻滚,因此只需要设置角速度的z分量,也就是偏航角yaw。
线速度和角速度的单位分别为m/s和rad/s。
5. turtlebot2数据读取
5.1 里程计数据
turtlebot2的里程信息通过/odom话题发布,消息类型为nav_msgs::Odometry,对其结构展开如下:
- nav_msgs::Odometry
-- Header header
--- uint32 seq
--- time stamp
--- string frame_id
-- string child_frame_id
-- geometry_msgs/PoseWithCovariance pose
--- geometry_msgs/Pose pose
---- geometry_msgs/Point position
----- float64 x
----- float64 y
----- float64 z
---- geometry_msgs/Quaternion orientation
----- float64 x
----- float64 y
----- float64 z
----- float64 w
--- float64[36] covariance
-- geometry_msgs/TwistWithCovariance twist
--- geometry_msgs/Twist twist
---- geometry_msgs/Vector3 linear
----- float64 x
----- float64 y
----- float64 z
---- geometry_msgs/Vector3 angular
----- float64 x
----- float64 y
----- float64 z
--- float64[36] covariance
所以里程计数据主要包括
- 时间戳
- 位姿(位置和姿态)
- 速度(线速度和角速度)
- 协方差矩阵(位姿协方差和速度协方差)
#include 5.2 IMU数据
turtlebot2的IMU信息通过/mobile_base/sensors/imu_data话题发布,消息类型为sensor_msgs/Imu,对其结构展开如下:
- sensor_msgs/Imu
-- std_msgs/Header header
--- uint32 seq
--- time stamp
--- string frame_id
-- geometry_msgs/Quaternion orientation
--- float64 x
--- float64 y
--- float64 z
--- float64 w
-- float64[9] orientation_covariance
-- geometry_msgs/Vector3 angular_velocity
--- float64 x
--- float64 y
--- float64 z
-- float64[9] angular_velocity_covariance
-- geometry_msgs/Vector3 linear_acceleration
--- float64 x
--- float64 y
--- float64 z
-- float64[9] linear_acceleration_covariance
6. turtlebot2仿真
本节参考:在gazebo中运行turtlebot机器人模拟gmapping的slam过程。
实现目标:使用gazebo提供turtlebot2机器人以及周围环境的仿真模型,通过键盘控制机器人移动,使用gmapping建立栅格地图,在rviz中显示地图。
6.1 仿真环境准备
(1)安装gazebo相关组件
$ sudo apt-get install ros-kinetic-gazebo-ros-pkgs ros-kinetic-gazebo-ros-control
(2)安装turtlebot相关包:
$ sudo apt-get install ros-kinetic-turtlebot-*
6.2 开始仿真
(1)设置环境模型的路径
$ export TURTLEBOT_GAZEBO_WORLD_FILE=/opt/ros/kinetic/share/turtlebot_gazebo/worlds/playground.world
如果不执行这一步,在启动turtlebot_gazebo时会提示以下错误信息:
Invalid tag: environment variable ‘TURTLEBOT_GAZEBO_WORLD_FILE’ is not set.
Arg xml is The traceback for the exception was written to the log file
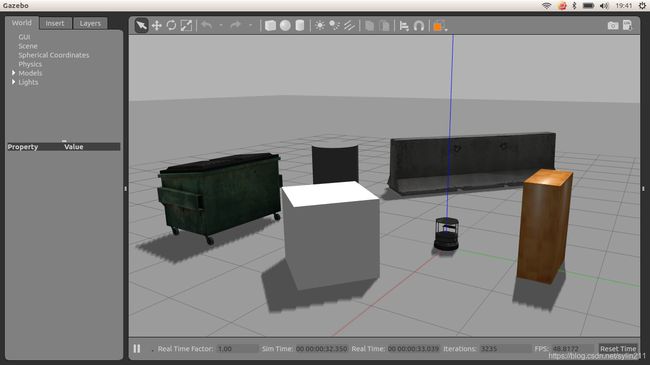
(2) 启动Gazebo并加载机器人和环境模型
$ roslaunch turtlebot_gazebo turtlebot_world.launch
(3)启动键盘遥控
$ roslaunch turtlebot_teleop keyboard_teleop.launch
 (4)使用gmapping进行建图
(4)使用gmapping进行建图
$ roslaunch turtlebot_gazebo gmapping_demo.launch
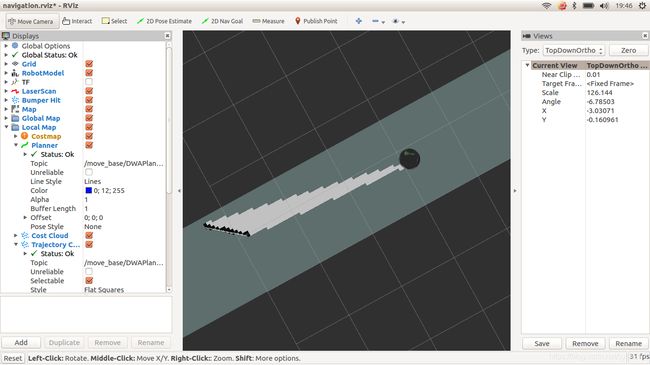
(5)启动rviz展示建图过程
$ roslaunch turtlebot_rviz_launchers view_navigation.launch
7. 其他记录
数据发布频率
从turtlebot2的硬件参数可以看出/odom和imu_data的数据发布频率应该是50Hz:
 通过rostopic命令也可以确定
通过rostopic命令也可以确定
$ rostopic hz /odom
$ rostopic hz /mobile_base/sensors/imu_data
补充:kobuki获取传感器数据是通过时间的方式进行数据实时获取的,可参考:kobuki_driver:Sigslots 。
数据延迟
所谓数据延迟,是指数据产生和到达之间延迟
$ rostopic delay /odom
$ rostopic delay /mobile_base/sensors/imu_data
轮子里程计和IMU的数据延迟区别很大,/odom的延迟高达18ms,而imu_data的延迟只有1ms,相差18倍。
为什么有这种现象?
从数据结构看,/odom用了37个float64,imu_data用了85个float64,也就差了2.3倍,所以不完全是因为数据量过大引起。通过查看带宽也可以验证:
$ rostopic bw /odom
$ rostopic bw /mobile_base/sensors/imu_data
/odom和imu_data的带宽分别大约是36KB/s和16KB/s,2.25倍。
协方差
位姿协方差:
( 0.1 0 0 0 0 0 0 0.1 0 0 0 0 0 0 1 0 10 0 0 0 0 0 0 1 0 10 0 0 0 0 0 0 1 0 10 0 0 0 0 0 0 0.5 ) \begin{pmatrix} 0.1 & 0 & 0 & 0 & 0 & 0\\ 0 & 0.1 & 0 & 0 & 0 & 0\\ 0 & 0 & 10^{10} & 0 & 0 & 0\\ 0 & 0 & 0 & 10^{10} & 0 & 0\\ 0 & 0 & 0 & 0 & 10^{10} & 0\\ 0 & 0 & 0 & 0 & 0 & 0.5\\ \end{pmatrix} ⎝⎜⎜⎜⎜⎜⎜⎛0.10000000.10000001010000000101000000010100000000.5⎠⎟⎟⎟⎟⎟⎟⎞
速度协方差:
( 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 ) \begin{pmatrix} 0 & 0 & 0 & 0 & 0 & 0\\ 0 & 0 & 0 & 0 & 0 & 0\\ 0 & 0 & 0 & 0 & 0 & 0\\ 0 & 0 & 0 & 0 & 0 & 0\\ 0 & 0 & 0 & 0 & 0 & 0\\ 0 & 0 & 0 & 0 & 0 & 0\\ \end{pmatrix} ⎝⎜⎜⎜⎜⎜⎜⎛000000000000000000000000000000000000⎠⎟⎟⎟⎟⎟⎟⎞
8. 参考
[1] turtlebot的mobile_base节点解析
[2] 简单的代码让turtlebot动起来 (使用kobuki底座)直行与旋转
[3] 简单的代码让turtlebot动起来II(使用kobuki底座)走三角形
[4] geometry_msgs/Twist Message
[5] nav_msgs/Odometry Message
[6] A C++ code to listen odometry messages from a Pioneer P3At robot using ROS.
[7] 在gazebo中运行turtlebot机器人模拟gmapping的slam过程
[8] kobuki doc