基于openpose的人体姿态识别部署详细过程
基于openpose的人体姿态识别部署详细过程
毕设的题目是这个问题,自己学了很久都没有看懂网上的各种各样的教程,终于在今天问老师之后解决了。具体过程如下。
1. opencv的下载
2. 下载CUDA、cuDNN以及安装
3. python 3.6的下载
4. openpose文件的下载
5. 使用python配置命令行参数
opencv的下载
下载地址https://opencv.org/,opencv安装很简单,教程可以看这篇https://blog.csdn.net/qq_41277822/article/details/104018866
下载CUDA、cuDNN以及安装
首先查看一下自己的电脑能用什么版本的CUDA,win+R,输入control,进入控制面板,把产看方式改为大图标或者小图标
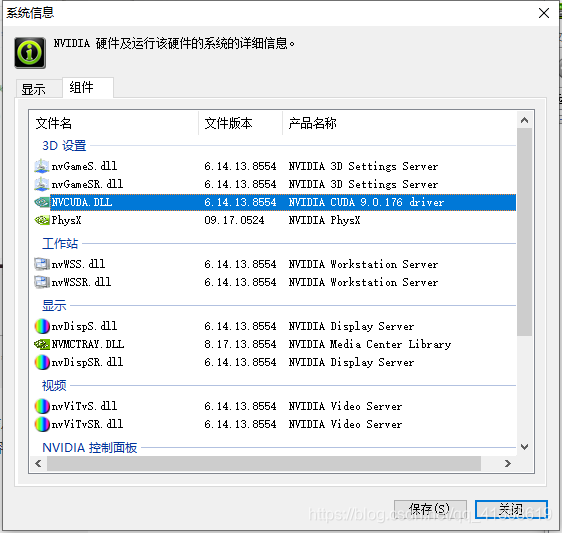
进入NVIDA控制面板,点击右上角帮助,系统信息,组件查看版本信息,可以看到我的电脑支持的版本号为9.0, 查看自己的版本号,我看网上说可以向下兼容,但是我安装8.0的时候并没有成功还是安装的9.0才成功的。而且因为CUDA的下载地址是国外的,国内的下载镜像经常不能用,就算能下载,速度也非常让人崩溃。所以文末会附上CUDA9.0和配套的CUDNN
CUDA的安装也很简单,不会的可以自行搜索。
附上下载CUDA地址:CUDA下载地址(不建议在官网上下载速度太慢)
CUDNN是CUDA的优化包,在CUDA安装完成后,将cuDNN压缩包CUDA文件夹下的文件解压到 C:\Program Files\NVIDIA GPU Computing Toolkit\CUDA\v9.0目录下
Python3.6的下载
Python的版本无所谓,只要能用就可以
下载地址:python下载地址
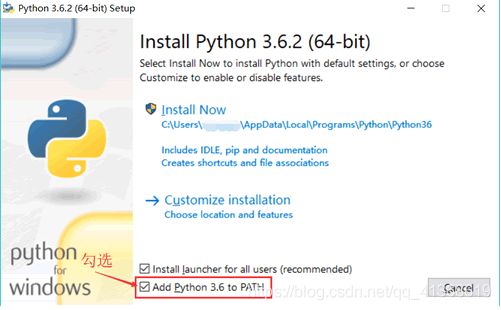
安装python过程也非常简单,主要就是不要忘记把PATH勾上
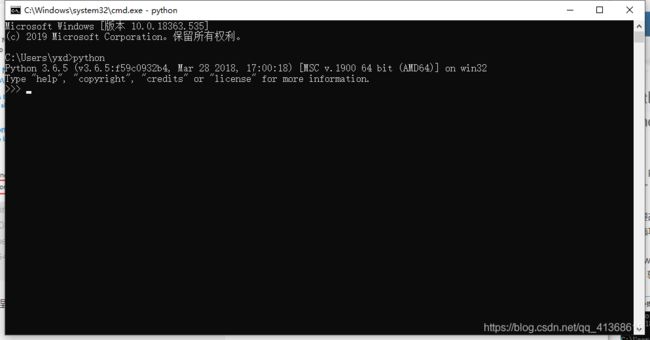
安装后可以在windows命令行程序中输入python查看是否安装成功如图所示
OPENPOSE文件的下载
1在这里使用的是opencv里的dnn中的openpose.py
opencv下载地址https://github.com/opencv/opencv
下载zip压缩文件,最近GitHub也总是进不去,文末也会一起附上网盘链接
由于还缺少COCO数据集所以还要下载COCO数据集
下载地址https://github.com/CMU-Perceptual-Computing-Lab/openpose/tree/master/models/pose
这里是COCO的文件,不知道怎么单独下载一个COCO文件所以我只能把整个openpose下载下来。
使用python配置命令行参数
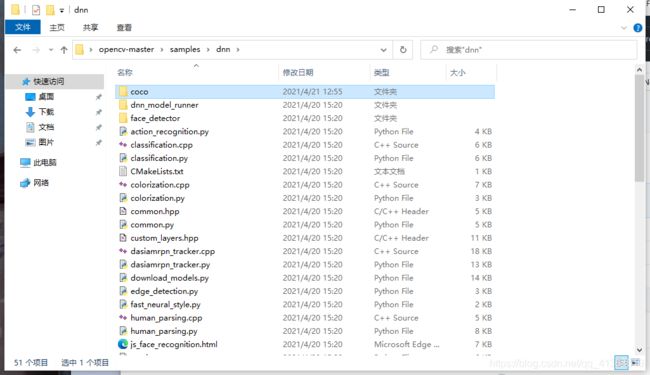
首先将下载下来的COCO文件夹放到dnn文件目录中如图所示。
打开openpose.py.
# To use Inference Engine backend, specify location of plugins:
# source /opt/intel/computer_vision_sdk/bin/setupvars.sh
import cv2 as cv
import numpy as np
import argparse
parser = argparse.ArgumentParser(
description='This script is used to demonstrate OpenPose human pose estimation network '
'from https://github.com/CMU-Perceptual-Computing-Lab/openpose project using OpenCV. '
'The sample and model are simplified and could be used for a single person on the frame.')
parser.add_argument('--input', help='Path to image or video. Skip to capture frames from camera')
parser.add_argument('--proto', help='Path to .prototxt')
parser.add_argument('--model', help='Path to .caffemodel')
parser.add_argument('--dataset', help='Specify what kind of model was trained. '
'It could be (COCO, MPI, HAND) depends on dataset.')
parser.add_argument('--thr', default=0.1, type=float, help='Threshold value for pose parts heat map')
parser.add_argument('--width', default=368, type=int, help='Resize input to specific width.')
parser.add_argument('--height', default=368, type=int, help='Resize input to specific height.')
parser.add_argument('--scale', default=0.003922, type=float, help='Scale for blob.')
args = parser.parse_args()
print(args.dataset)
if args.dataset == 'COCO':
BODY_PARTS = { "Nose": 0, "Neck": 1, "RShoulder": 2, "RElbow": 3, "RWrist": 4,
"LShoulder": 5, "LElbow": 6, "LWrist": 7, "RHip": 8, "RKnee": 9,
"RAnkle": 10, "LHip": 11, "LKnee": 12, "LAnkle": 13, "REye": 14,
"LEye": 15, "REar": 16, "LEar": 17, "Background": 18 }
POSE_PAIRS = [["Neck", "RShoulder"], ["Neck", "LShoulder"], ["RShoulder", "RElbow"],
["RElbow", "RWrist"], ["LShoulder", "LElbow"], ["LElbow", "LWrist"],
["Neck", "RHip"], ["RHip", "RKnee"], ["RKnee", "RAnkle"], ["Neck", "LHip"],
["LHip", "LKnee"], ["LKnee", "LAnkle"], ["Neck", "Nose"], ["REye", "REar"],
["Nose", "REye"], ["Nose", "LEye"], ["LEye", "LEar"]]
elif args.dataset == 'MPI':
BODY_PARTS = { "Head": 0, "Neck": 1, "RShoulder": 2, "RElbow": 3, "RWrist": 4,
"LShoulder": 5, "LElbow": 6, "LWrist": 7, "RHip": 8, "RKnee": 9,
"RAnkle": 10, "LHip": 11, "LKnee": 12, "LAnkle": 13, "Chest": 14,
"Background": 15 }
POSE_PAIRS = [ ["Head", "Neck"], ["Neck", "RShoulder"], ["RShoulder", "RElbow"],
["RElbow", "RWrist"], ["Neck", "LShoulder"], ["LShoulder", "LElbow"],
["LElbow", "LWrist"], ["Neck", "Chest"], ["Chest", "RHip"], ["RHip", "RKnee"],
["RKnee", "RAnkle"], ["Chest", "LHip"], ["LHip", "LKnee"], ["LKnee", "LAnkle"] ]
else:
assert(args.dataset == "HAND")
BODY_PARTS = { "Wrist": 0,
"ThumbMetacarpal": 1, "ThumbProximal": 2, "ThumbMiddle": 3, "ThumbDistal": 4,
"IndexFingerMetacarpal": 5, "IndexFingerProximal": 6, "IndexFingerMiddle": 7, "IndexFingerDistal": 8,
"MiddleFingerMetacarpal": 9, "MiddleFingerProximal": 10, "MiddleFingerMiddle": 11, "MiddleFingerDistal": 12,
"RingFingerMetacarpal": 13, "RingFingerProximal": 14, "RingFingerMiddle": 15, "RingFingerDistal": 16,
"LittleFingerMetacarpal": 17, "LittleFingerProximal": 18, "LittleFingerMiddle": 19, "LittleFingerDistal": 20,
}
POSE_PAIRS = [ ["Wrist", "ThumbMetacarpal"], ["ThumbMetacarpal", "ThumbProximal"],
["ThumbProximal", "ThumbMiddle"], ["ThumbMiddle", "ThumbDistal"],
["Wrist", "IndexFingerMetacarpal"], ["IndexFingerMetacarpal", "IndexFingerProximal"],
["IndexFingerProximal", "IndexFingerMiddle"], ["IndexFingerMiddle", "IndexFingerDistal"],
["Wrist", "MiddleFingerMetacarpal"], ["MiddleFingerMetacarpal", "MiddleFingerProximal"],
["MiddleFingerProximal", "MiddleFingerMiddle"], ["MiddleFingerMiddle", "MiddleFingerDistal"],
["Wrist", "RingFingerMetacarpal"], ["RingFingerMetacarpal", "RingFingerProximal"],
["RingFingerProximal", "RingFingerMiddle"], ["RingFingerMiddle", "RingFingerDistal"],
["Wrist", "LittleFingerMetacarpal"], ["LittleFingerMetacarpal", "LittleFingerProximal"],
["LittleFingerProximal", "LittleFingerMiddle"], ["LittleFingerMiddle", "LittleFingerDistal"] ]
inWidth = args.width
inHeight = args.height
inScale = args.scale
net = cv.dnn.readNet(cv.samples.findFile(args.proto), cv.samples.findFile(args.model))
cap = cv.VideoCapture(args.input if args.input else 0)##视频读取
while cv.waitKey(1) < 0:
hasFrame, frame = cap.read()
if not hasFrame:
cv.waitKey()
break
frameWidth = frame.shape[1]
frameHeight = frame.shape[0]
inp = cv.dnn.blobFromImage(frame, inScale, (inWidth, inHeight),
(0, 0, 0), swapRB=False, crop=False)
net.setInput(inp)
out = net.forward()
assert(len(BODY_PARTS) <= out.shape[1])
points = []
for i in range(len(BODY_PARTS)):
# Slice heatmap of corresponding body's part.
heatMap = out[0, i, :, :]
# Originally, we try to find all the local maximums. To simplify a sample
# we just find a global one. However only a single pose at the same time
# could be detected this way.
_, conf, _, point = cv.minMaxLoc(heatMap)
x = (frameWidth * point[0]) / out.shape[3]
y = (frameHeight * point[1]) / out.shape[2]
# Add a point if it's confidence is higher than threshold.
points.append((int(x), int(y)) if conf > args.thr else None)
for pair in POSE_PAIRS:
partFrom = pair[0]
partTo = pair[1]
assert(partFrom in BODY_PARTS)
assert(partTo in BODY_PARTS)
idFrom = BODY_PARTS[partFrom]
idTo = BODY_PARTS[partTo]
if points[idFrom] and points[idTo]:
cv.line(frame, points[idFrom], points[idTo], (0, 255, 0), 3)
cv.ellipse(frame, points[idFrom], (3, 3), 0, 0, 360, (0, 0, 255), cv.FILLED)
cv.ellipse(frame, points[idTo], (3, 3), 0, 0, 360, (0, 0, 255), cv.FILLED)
t, _ = net.getPerfProfile()
freq = cv.getTickFrequency() / 1000
cv.putText(frame, '%.2fms' % (t / freq), (10, 20), cv.FONT_HERSHEY_SIMPLEX, 0.5, (0, 0, 0))
cv.imshow('OpenPose using OpenCV', frame)
cv.waitKey(0)
可以看见第十一行到十四行是需要输入的内容。
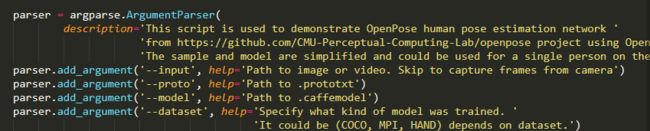
input要输入的视频地址,事先要下载一个比较清晰的一个人的视频在dnn文件夹中,proto是要输入的prototex的地址,model是要输入的caffemodel地址,这两个文件都在COCO文件夹中,dataset是选择的数据集COCO。
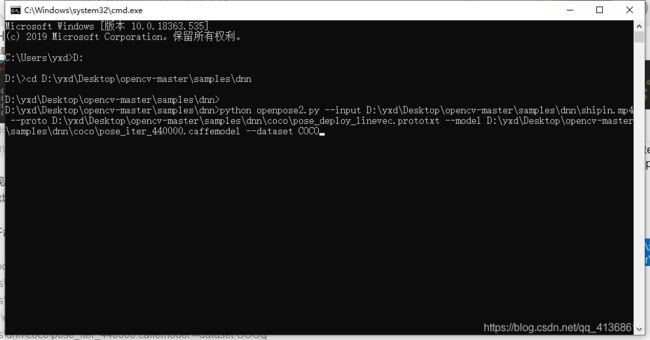
具体操作为打开命令行跳转到dnn文件夹下,输入一下内容
python openpose2.py --input D:\yxd\Desktop\opencv-master\samples\dnn\shipin.mp4 --proto D:\yxd\Desktop\opencv-master\samples\dnn\coco\pose_deploy_linevec.prototxt --model D:\yxd\Desktop\opencv-master\samples\dnn\coco\pose_iter_440000.caffemodel --dataset COCO
注意里面文件的地址要换成在你电脑中所在的位置。效果如下图
就能得到结果了。
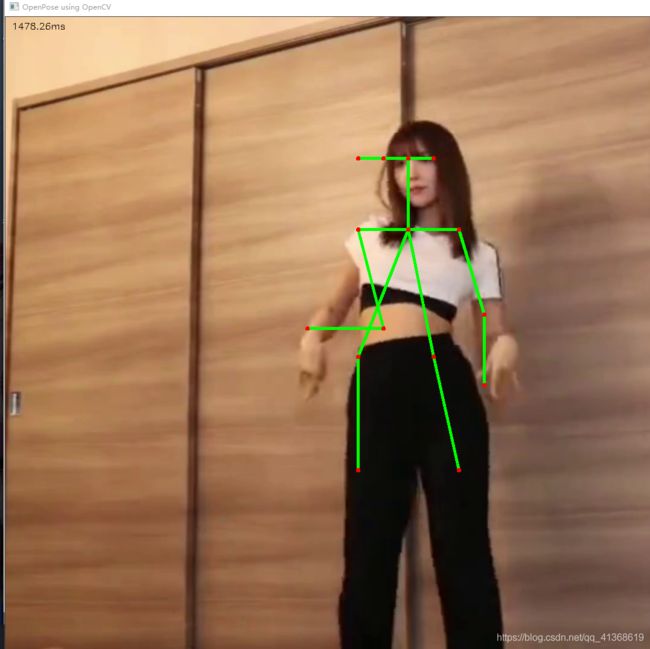
电脑配置不是很好所以视频会卡的像图片一样。
如果想对图片进行骨骼提取和视频没有太大区别,但是需要把input换成图片所在地址。
代码如下
# To use Inference Engine backend, specify location of plugins:
# source /opt/intel/computer_vision_sdk/bin/setupvars.sh
import cv2 as cv
import numpy as np
import argparse
parser = argparse.ArgumentParser(
description='This script is used to demonstrate OpenPose human pose estimation network '
'from https://github.com/CMU-Perceptual-Computing-Lab/openpose project using OpenCV. '
'The sample and model are simplified and could be used for a single person on the frame.')
parser.add_argument('--input', help='Path to image or video. Skip to capture frames from camera')
parser.add_argument('--proto', help='Path to .prototxt')
parser.add_argument('--model', help='Path to .caffemodel')
parser.add_argument('--dataset', help='Specify what kind of model was trained. '
'It could be (COCO, MPI, HAND) depends on dataset.')
parser.add_argument('--thr', default=0.1, type=float, help='Threshold value for pose parts heat map')
parser.add_argument('--width', default=368, type=int, help='Resize input to specific width.')
parser.add_argument('--height', default=368, type=int, help='Resize input to specific height.')
parser.add_argument('--scale', default=0.003922, type=float, help='Scale for blob.')
args = parser.parse_args()
print('args::', args)
print(args.dataset)
if args.dataset == 'COCO':
BODY_PARTS = { "Nose": 0, "Neck": 1, "RShoulder": 2, "RElbow": 3, "RWrist": 4,
"LShoulder": 5, "LElbow": 6, "LWrist": 7, "RHip": 8, "RKnee": 9,
"RAnkle": 10, "LHip": 11, "LKnee": 12, "LAnkle": 13, "REye": 14,
"LEye": 15, "REar": 16, "LEar": 17, "Background": 18 }
POSE_PAIRS = [["Neck", "RShoulder"], ["Neck", "LShoulder"], ["RShoulder", "RElbow"],
["RElbow", "RWrist"], ["LShoulder", "LElbow"], ["LElbow", "LWrist"],
["Neck", "RHip"], ["RHip", "RKnee"], ["RKnee", "RAnkle"], ["Neck", "LHip"],
["LHip", "LKnee"], ["LKnee", "LAnkle"], ["Neck", "Nose"], ["REye", "REar"],
["Nose", "REye"], ["Nose", "LEye"], ["LEye", "LEar"]]
elif args.dataset == 'MPI':
BODY_PARTS = { "Head": 0, "Neck": 1, "RShoulder": 2, "RElbow": 3, "RWrist": 4,
"LShoulder": 5, "LElbow": 6, "LWrist": 7, "RHip": 8, "RKnee": 9,
"RAnkle": 10, "LHip": 11, "LKnee": 12, "LAnkle": 13, "Chest": 14,
"Background": 15 }
POSE_PAIRS = [ ["Head", "Neck"], ["Neck", "RShoulder"], ["RShoulder", "RElbow"],
["RElbow", "RWrist"], ["Neck", "LShoulder"], ["LShoulder", "LElbow"],
["LElbow", "LWrist"], ["Neck", "Chest"], ["Chest", "RHip"], ["RHip", "RKnee"],
["RKnee", "RAnkle"], ["Chest", "LHip"], ["LHip", "LKnee"], ["LKnee", "LAnkle"] ]
else:
assert(args.dataset == "HAND")
BODY_PARTS = { "Wrist": 0,
"ThumbMetacarpal": 1, "ThumbProximal": 2, "ThumbMiddle": 3, "ThumbDistal": 4,
"IndexFingerMetacarpal": 5, "IndexFingerProximal": 6, "IndexFingerMiddle": 7, "IndexFingerDistal": 8,
"MiddleFingerMetacarpal": 9, "MiddleFingerProximal": 10, "MiddleFingerMiddle": 11, "MiddleFingerDistal": 12,
"RingFingerMetacarpal": 13, "RingFingerProximal": 14, "RingFingerMiddle": 15, "RingFingerDistal": 16,
"LittleFingerMetacarpal": 17, "LittleFingerProximal": 18, "LittleFingerMiddle": 19, "LittleFingerDistal": 20,
}
POSE_PAIRS = [ ["Wrist", "ThumbMetacarpal"], ["ThumbMetacarpal", "ThumbProximal"],
["ThumbProximal", "ThumbMiddle"], ["ThumbMiddle", "ThumbDistal"],
["Wrist", "IndexFingerMetacarpal"], ["IndexFingerMetacarpal", "IndexFingerProximal"],
["IndexFingerProximal", "IndexFingerMiddle"], ["IndexFingerMiddle", "IndexFingerDistal"],
["Wrist", "MiddleFingerMetacarpal"], ["MiddleFingerMetacarpal", "MiddleFingerProximal"],
["MiddleFingerProximal", "MiddleFingerMiddle"], ["MiddleFingerMiddle", "MiddleFingerDistal"],
["Wrist", "RingFingerMetacarpal"], ["RingFingerMetacarpal", "RingFingerProximal"],
["RingFingerProximal", "RingFingerMiddle"], ["RingFingerMiddle", "RingFingerDistal"],
["Wrist", "LittleFingerMetacarpal"], ["LittleFingerMetacarpal", "LittleFingerProximal"],
["LittleFingerProximal", "LittleFingerMiddle"], ["LittleFingerMiddle", "LittleFingerDistal"] ]
inWidth = args.width
inHeight = args.height
inScale = args.scale
net = cv.dnn.readNet(cv.samples.findFile(args.proto), cv.samples.findFile(args.model))#加载模型
frame = cv.imread(args.input) ##读取图片
frameWidth = frame.shape[1] ##shape函数读取矩阵长度
frameHeight = frame.shape[0]
inp = cv.dnn.blobFromImage(frame, inScale, (inWidth, inHeight),
(0, 0, 0), swapRB=False, crop=False)##对图像进行预处理,裁剪缩放
net.setInput(inp)
out = net.forward()
assert(len(BODY_PARTS) <= out.shape[1])
points = []
for i in range(len(BODY_PARTS)):
# Slice heatmap of corresponding body's part.
heatMap = out[0, i, :, :]
# Originally, we try to find all the local maximums. To simplify a sample
# we just find a global one. However only a single pose at the same time
# could be detected this way.
_, conf, _, point = cv.minMaxLoc(heatMap)
x = (frameWidth * point[0]) / out.shape[3]
y = (frameHeight * point[1]) / out.shape[2]
# Add a point if it's confidence is higher than threshold.
points.append((int(x), int(y)) if conf > args.thr else None)
print(points)
for pair in POSE_PAIRS:
partFrom = pair[0]
partTo = pair[1]
assert(partFrom in BODY_PARTS)
assert(partTo in BODY_PARTS)
idFrom = BODY_PARTS[partFrom]
idTo = BODY_PARTS[partTo]
if points[idFrom] and points[idTo]:
cv.line(frame, points[idFrom], points[idTo], (0, 255, 0), 3)
cv.ellipse(frame, points[idFrom], (3, 3), 0, 0, 360, (0, 0, 255), cv.FILLED)
cv.ellipse(frame, points[idTo], (3, 3), 0, 0, 360, (0, 0, 255), cv.FILLED)
t, _ = net.getPerfProfile()
freq = cv.getTickFrequency() / 1000
cv.putText(frame, '%.2fms' % (t / freq), (10, 20), cv.FONT_HERSHEY_SIMPLEX, 0.5, (0, 0, 0))
cv.imshow('OpenPose using OpenCV', frame)
cv.waitKey(0)
资源下载
在这个项目中需要的资源都存到网盘里了,需要自取
链接:https://pan.baidu.com/s/16AQlgMpg1WHlyIo2_NbYeA
提取码:90tx
这里面的opencv-master里已经把COCO放进去了,还有两张示例图片以及视频。openpose.py是图片处理,openpose2.py是视频提取。
第一次写这个文章,里面可能有谬误,多多包涵。