win10+libtorch+yolov5-6.0部署
提示:文章写完后,目录可以自动生成,如何生成可参考右边的帮助文档
文章目录
- 前言
- 一、环境配置
-
- 环境下载
- 二、环境变量的配置
- 三.模型在libtorch上的部署
-
- 转换模型代码
- 模型推理代码(video)
- 总结
前言
Libtorch是pytorch的C++版本,现在的很多大型项目都是用C++写的,想使用训练好的模型,需要通过caffe等方式去集成,比较麻烦。 这里pytorch官方提出了Libtorch,我们就可以把pytorch训练好的模型,打包起来,直接在C++工程中去用就好了,相比较caffe等,非常方便!
提示:以下是本篇文章正文内容,下面案例可供参考
一、环境配置
本机配置:cuda11.1、pytorch1.8.2、cudnn8.2、vs2019、opencv4.5.3
环境下载
vs2019下载链接:下载vs2019
opencv下载链接:下载opencv
libtorch下载链接:下载libtorch
cuda和cudnn下载链接:下载cuda11.1.1下载cudnn8.2
安装pytorch

安装libtorch,下载放到文件里即可

安装成功
测试代码,在vs2019中新建工程、空项目。
#include "torch/torch.h"
#include "torch/script.h"
int main()
{
torch::Tensor output = torch::randn({ 3,2 });
std::cout << output;
return 0;
}
二、环境变量的配置
参考博文
1。打开项目-配置属性-调试-环境,输入libtorch的地址
PATH=D:\Myproject\libtorch-win-shared-with-deps-1.8.1+cu111\libtorch\lib;%CUDA_PATH%;%PATH%$(LocalDebuggerEnvironment)
![]() 2。更改VC++目录-包含目录
2。更改VC++目录-包含目录
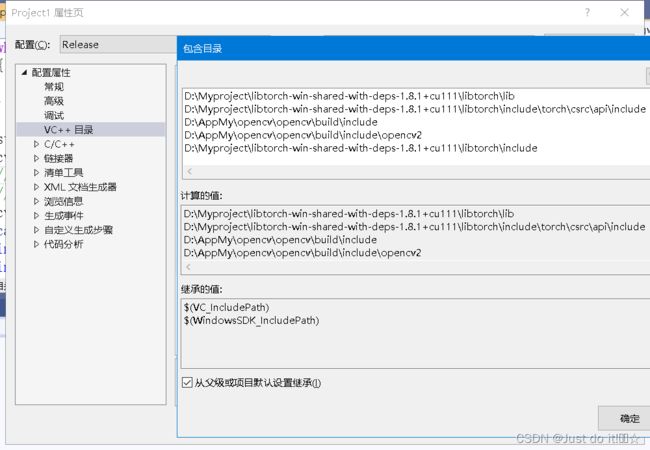
更改外部包含目录

更改库目录,添加opencv、libtorch、cuda地址

3.更改C/C++ - 常规-附加包含目录

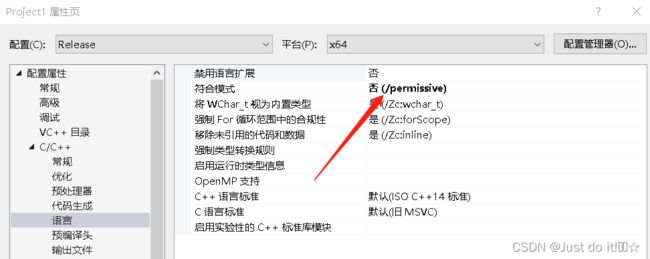
语言-符合模式改为否
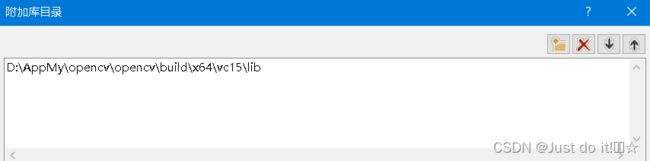
3。更改链接器-常规-附加库目录
更改输入-附加依赖项
c10.lib
caffe2_nvrtc.lib
c10_cuda.lib
torch.lib
torch_cuda.lib
torch_cuda_cu.lib
-INCLUDE:?searchsorted_cuda@native@at@@YA?AVTensor@2@AEBV32@0_N1@Z
torch_cuda_cpp.lib
torch_cpu.lib
cublas.lib
cudnn.lib
opencv_world340.lib
opencv_world340d.lib
-INCLUDE:?warp_size@cuda@at@@YAHXZ
更改命令行,加入/INCLUDE:?warp_size@cuda@at@@YAHXZ ,否则可能无法调用cuda

三.模型在libtorch上的部署
参考的博文代码:链接我用的是yolov56.0版本,目前还没有试最新的版本。
这里有我在使用orchscript模型时遇到问题需要解决,留一下坑:
问题1.我在使用yolov5官方代码expor.py转换的模型时会出现报错,目前猜测是模型不匹配的结果原因,所以后续是否可以用官方代码进行转换的模型使用?
!!!如果出现module.forward(inputs)C++ 异常: std::runtime_error,位于内存位置的错误就是模型不匹配的结果,
转换模型代码
"""Exports a YOLOv5 *.pt model to ONNX and TorchScript formats
Usage:
$ export PYTHONPATH="$PWD" && python models/export.py --weights ./weights/yolov5s.pt --img 640 --batch 1
"""
import argparse
import sys
import time
sys.path.append('./') # to run '$ python *.py' files in subdirectories
import torch
import torch.nn as nn
import models
from models.experimental import attempt_load
from utils.activations import Hardswish, SiLU
from utils.general import set_logging, check_img_size
if __name__ == '__main__':
parser = argparse.ArgumentParser()
parser.add_argument('--weights', type=str, default=r'D:\project_process\Completed_projects\yolo-deploy\yolov5-6.0\weights\yolov5n.pt', help='weights path') # from yolov5/models/
parser.add_argument('--img-size', nargs='+', type=int, default=[640, 640], help='image size') # height, width
parser.add_argument('--batch-size', type=int, default=1, help='batch size')
opt = parser.parse_args()
opt.img_size *= 2 if len(opt.img_size) == 1 else 1 # expand
print(opt)
set_logging()
t = time.time()
# Load PyTorch model
model = attempt_load(opt.weights, map_location=torch.device('cuda')) # load FP32 model
labels = model.names
# Checks
gs = int(max(model.stride)) # grid size (max stride)
opt.img_size = [check_img_size(x, gs) for x in opt.img_size] # verify img_size are gs-multiples
# Input
img = torch.zeros(opt.batch_size, 3, *opt.img_size).to(device='cuda')
# image size(1,3,320,192) iDetection
# Update model
for k, m in model.named_modules():
m._non_persistent_buffers_set = set() # pytorch 1.6.0 compatibility
if isinstance(m, models.common.Conv): # assign export-friendly activations
if isinstance(m.act, nn.Hardswish):
m.act = Hardswish()
elif isinstance(m.act, nn.SiLU):
m.act = SiLU()
# elif isinstance(m, models.yolo.Detect):
# m.forward = m.forward_export # assign forward (optional)
#model.model[-1].export = True # set Detect() layer export=True
model.model[-1].export = False
y = model(img) # dry run
# TorchScript export
try:
print('\nStarting TorchScript export with torch %s...' % torch.__version__)
f = opt.weights.replace('.pt', '.torchscript.pt') # filename
ts = torch.jit.trace(model, img)
ts.save(f)
print('TorchScript export success, saved as %s' % f)
except Exception as e:
print('TorchScript export failure: %s' % e)
# ONNX export
try:
import onnx
print('\nStarting ONNX export with onnx %s...' % onnx.__version__)
f = opt.weights.replace('.pt', '.onnx') # filename
torch.onnx.export(model, img, f, verbose=False, opset_version=12, input_names=['images'],
output_names=['classes', 'boxes'] if y is None else ['output'])
# Checks
onnx_model = onnx.load(f) # load onnx model
onnx.checker.check_model(onnx_model) # check onnx model
# print(onnx.helper.printable_graph(onnx_model.graph)) # print a human readable model
print('ONNX export success, saved as %s' % f)
except Exception as e:
print('ONNX export failure: %s' % e)
# CoreML export
try:
import coremltools as ct
print('\nStarting CoreML export with coremltools %s...' % ct.__version__)
# convert model from torchscript and apply pixel scaling as per detect.py
model = ct.convert(ts, inputs=[ct.ImageType(name='image', shape=img.shape, scale=1 / 255.0, bias=[0, 0, 0])])
f = opt.weights.replace('.pt', '.mlmodel') # filename
model.save(f)
print('CoreML export success, saved as %s' % f)
except Exception as e:
print('CoreML export failure: %s' % e)
# Finish
print('\nExport complete (%.2fs). Visualize with https://github.com/lutzroeder/netron.' % (time.time() - t))
模型推理代码(video)
修改模型进行编译即可,模型文件放在项目main.cpp同一目录下。
#include
#include 点击生成解决方案,会生成一个.exe文件,用cmd运行
运行指令:
Project1.exe "C:\\Users\\11097\\source\\repos\\Project1\\x64\\Release\\test.mp4"
总结
1。需要做到适配yolov5最新的模型版本,6.1版本