深度强化学习中利用N-步TD预测算法在随机漫步应用中实战(超详细 附源码)
需要源码请点赞关注收藏后评论区留下QQ或者私信~~~
一、N-步TD预测
N步TD预测算法在TD(0)和MC之间架起了一座桥梁,而TD(L)算法则能进一步实现两者之间的无缝衔接。下面介绍N步TD预测
N步TD算法更新方式介于TD(0)和MC之间,该类算法利用未来多步奖赏和多部之后的值函数估计求得目标值,例如两步更新就是利用未来两步奖赏和两步之后的值函数估计得到两步回报。N步TD属于TD(时序差分法)当前状态的更新目标是当前Agent采集到的后续n步奖赏与后继第n个状态的带权价值估计之和,与TD(0)不同的是:这里的后继状态是n步后的状态,而不是当前状态的下一个状态
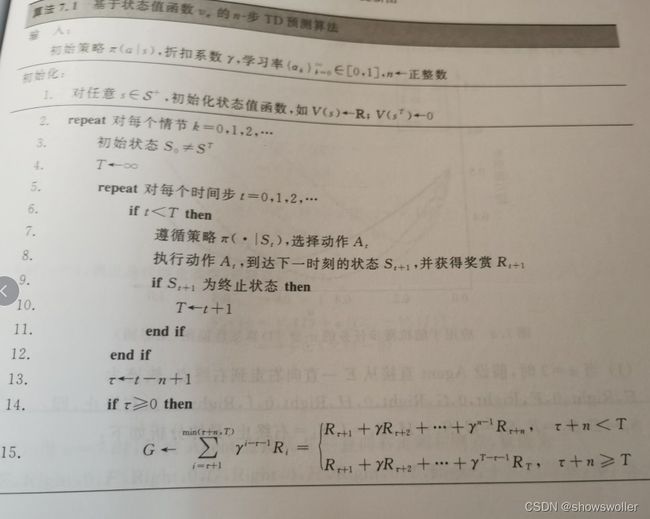
基于状态值函数的N步TD预测算法流程图如下
二、N步TD在随机漫步实例中的应用
背景描述:Agent起始位置为E点,在A点左侧和I点右侧有两个终止位置,即左终点和右终点,Agent从A点向左走到左终点则获得-1的奖赏,从I点向右走到右终点则获得+1的奖赏,其他情况奖赏均为0,除了终点以外,在每个点Agent都可以等概率的采取向左或者向右两个动作,固定学习率为0.5,折扣系数为1,初始化所有状态值为0
示例图如下

下图是对n采取不同的数值来说明N步TD算法的流程,然后讨论n以及学习率对于N步TD算法性能的影响 结果如下图

重复1000次,得到平均结果可以看出在11个状态的随机漫步问题中,n取值略大于1时效果会更好,并且选取介于TD(0)和MC之间的N步TD预测算法会得到更好的结果
同样表明所有的N步TD算法在合适的条件下都能收敛到正确的预测,同时随着n的增加,n步回报相对真实值函数偏差也会越来越小,但是计算需要耗费更多时间和资源,所以要选择合适的n进行偏差和方差之间较好的权衡
代码如下
''' 深度强化学习——原理、算法与PyTorch实战,代码名称:代22-例7.1-n-步TD预测算法在随机漫步实例中的应用.py '''
# 导入相应的模块
from random import random, choice
from myBookEnvCode.my_random_walk import RandomWalkEnv
import matplotlib.pyplot as plt
import math
import numpy as np
import max_min_smooth_py
nums_for_ave = 1000 # 平均1000次
class Agent():
def __init__(self):
self.actions = [0, 1] # 两个动作
self.aveErrors = {}
''' 不同n时的平均均方误差 '''
self.aveErrors[1] = np.zeros(100)
self.aveErrors[2] = np.zeros(100)
self.aveErrors[4] = np.zeros(100)
self.aveErrors[8] = np.zeros(100)
self.epErrors = []
def calc_error(self, ep_num, V):
''' 计算平均均方误差 '''
error = 0
for i in range(1, 10):
target = -1 + 0.2 * i
data = V[i] if i in V.keys() else 0
error = error + (target - data) * (target - data)
error = math.sqrt(error / 9)
self.epErrors[ep_num] = error
def nStepTDLearning(self, env, n, gamma, alpha, max_episode_num):
''' n步Td算法学习 '''
self.V = {}
self.epErrors = np.zeros(max_episode_num)
num_episode = 1
''' 运行max_episode_num情节 '''
while num_episode <= max_episode_num:
s = env.reset() # 环境初始化
if not s in self.V.keys():
self.V[s] = 0
a = self.Policy(s, num_episode) # 选择动作
time_in_episode = 0
T_ep = 1000
ep_states = [s]
ep_actions = [a]
ep_rewards = [0] # 奖赏下标从1开始
time_update = 0
while True:
if time_in_episode < T_ep:
n_s, n_r, done, _ = env.step(a) # 进入下一个状态
env.render()
if not n_s in self.V.keys(): # 没有访问过的状态,值初始化为0
self.V[n_s] = 0
ep_states.append(n_s)
ep_rewards.append(n_r)
if done:
T_ep = time_in_episode + 1
else:
n_a = self.Policy(n_s, num_episode)
ep_actions.append(n_a)
s = n_s
a = n_a
time_update = time_in_episode - n + 1
''' 判断,进行更新 '''
if time_update >= 0:
n_step_return = 0
xs = 1
for i in range(time_update + 1,
min(time_update + n + 1, T_ep + 1)):
n_step_return += xs * ep_rewards[i]
xs *= gamma
if (time_update + n < T_ep):
n_step_return += xs * self.__getVValue(
ep_states[time_update + n])
''' 获取旧的v值,更新后写进v表 '''
old_v = self.__getVValue(ep_states[time_update])
new_v = old_v + alpha * (n_step_return - old_v)
self.__setVValue(ep_states[time_update], new_v)
time_in_episode += 1
if (time_update == T_ep - 1):
break
self.calc_error(num_episode - 1, self.V) # 每个情节结束计算一次误差
num_episode += 1
self.aveErrors[n][int(alpha * 100) - 1] += sum(
self.epErrors) / max_episode_num # 所有情节误差进行平均
return
def Policy(self, s, episode_num):
''' 定义策略 '''
a = choice(list(self.actions)) # 左右走概率均等的策略
return a
def __getVValue(self, s): # ①
''' V值的获取 '''
return self.V[s] # argmax(q)
def __setVValue(self, s, new_v): # ②
''' V值的设置 '''
self.V[s] = new_v
def dealData(aveErrors):
''' 处理数据 '''
aveErrors = max_min_smooth_py.max_min_smooth(aveErrors)
for i in range(len(aveErrors)):
aveErrors[i] = aveErrors[i] / nums_for_ave
return aveErrors
def plot_n_alpha(aveErrors):
''' 绘制图像 '''
x_axis = np.linspace(0.01, 1, 100)
ax = plt.gca()
ax.spines['top'].set_color('none')
ax.spines['right'].set_color('none')
ax.xaxis.set_ticks_position('bottom') # 用bottom代替x轴
ax.yaxis.set_ticks_position('left') # 用left代替y轴
'''不同n的取值时的平均均方根误差'''
plt.plot(x_axis,
dealData(aveErrors[1]),
color="green",
ls='-',
label="$n=1$")
plt.plot(x_axis,
dealData(aveErrors[2]),
color="red",
ls='--',
label="$n=2$")
rors[8]),
color="blue",
ls=':',
label="$n=8$")
plt.legend()
plt.xlabel(r"$\alpha$")
plt.ylabel("平均均方根误差")
plt.show()
def nStepTDLearningExample(agent, env):
''' 取不同学习率进行实验 '''
x = np.linspace(0.01, 1, 100)
for alpha_num in x: # 不同n值的实验结果
for _ in range(nums_for_ave):
agent.nStepTDLearning(env=env,
n=1,
gamma=1,
alpha=alpha_num,
max_episode_num=6)
for _ in range(nums_for_ave):
agent.nStepTDLearning(env=env,
n=2,
gamma=1,
alpha=alpha_num,
max_episode_num=6)
for _ in range(nums_for_ave):
agent.nStepTDLearning(env=env,
n=4,
gamma=1,
alpha=alpha_num,
max_episode_num=6)
for _ in range(nums_for_ave):
if __name__ == "__main__":
agent = Agent()
env = RandomWalkEnv() # 引入环境env
print("Learning...")
nStepTDLearningExample(agent, env)
创作不易 觉得有帮助请点赞关注收藏~~~