【ros】初学ROS的学习笔记——创建自定义话题消息
自定义话题消息的创建
本文代码为c++,系统为ubuntu20.04
前言
依据材料:古月ros入门21讲 、 ROS机器人开发实践
文章目录
- 自定义话题消息的创建
- 前言
- 1.定义msg文件
- 2. 设置编译规则
-
- 1.在package.xml中添加依赖
- 2.在CMakeLists.txt中添加编译选
- 3.话题消息的试验
- 本系列将不定时更新
1.定义msg文件
进入到工作空间的src文件夹中,创建一下msg文件夹,(要在src文件夹中右击打开点击打开终端)进入终端,输入指令:
mkdir msg
然后再进入到msg文件夹中,输入以下指令:
touch Person.msg
打开 Person.msg 输入以下代码:
string name
uint8 sex
uint8 age
uint8 unknown= 0
uint8 male = 1
uint8 female =2
该文件来源于古月ROS21讲。具体讲解请看其第12讲的视频。
至此,自定义话题基础的搭建算是结束了。
2. 设置编译规则
1.在package.xml中添加依赖
打开leaning_topic中的 package.xml 在最后处(66行左右)放入以下代码:
<build_depend>message_generation</build_depend>
<exec_depend>message_runtime</exec_depend>
2.在CMakeLists.txt中添加编译选
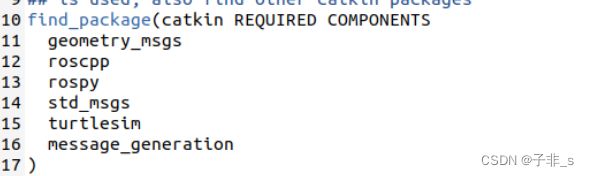
A .打开CMakeLists.txt,在find_pakage中放入
message_generation
B. 在 Declare ROS messages, services and actions 模块的结尾处加入以下代码:
add_message_files(FILES Person.msg)
generate_messages(DEPENDENCIES std_msgs)
C. 再于catkin specific configuration模块添加依赖:
message run_tinme
如图所示:

D. 退回工作空间根目录输入指令进行编译:
catkin_make
若出现CMake Error at /opt/ros/noetic/share/catkin/cmake/safe_execute_process.cmake:11 (message): execute 可能是Person.msg文件没有书写正确。
3.话题消息的试验
构建subscriber和publisher
代码如下:
发布者(person_publisher.cpp)
/***********************************************************************
Copyright 2020 GuYueHome (www.guyuehome.com).
***********************************************************************/
/**
* 该例程将发布/person_info话题,自定义消息类型learning_topic::Person
*/
#include 接受者(person_subscriber.cpp)
/***********************************************************************
Copyright 2020 GuYueHome (www.guyuehome.com).
***********************************************************************/
/**
* 该例程将订阅/person_info话题,自定义消息类型learning_topic::Person
*/
#include 然后再如之前发布者和订阅者的构建一样,在CMakeLists下加入以下代码:
add_executable(person_publisher src/person_publisher.cpp)
target_link_libraries(person_publisher ${catkin_LIBRARIES})
add_dependencies(person_publisher ${PROJECT_NAME}_generate_messages_cpp)
add_executable(person_subscriber src/person_subscriber.cpp)
target_link_libraries(person_subscriber ${catkin_LIBRARIES})
add_dependencies(person_subscriber ${PROJECT_NAME}_generate_messages_cpp)
启动这两项即可完成通讯。