基于Dijkstra和A*算法的机器人路径规划(Matlab代码实现)
个人主页:研学社的博客
欢迎来到本博客❤️❤️
博主优势:博客内容尽量做到思维缜密,逻辑清晰,为了方便读者。
⛳️座右铭:行百里者,半于九十。
本文目录如下:
目录
1 概述
2 运行结果
3 Matlab代码实现
4 参考文献

1 概述
网络分析是GIS中非常重要的空间分析功能之一, 最短路径分析又是网络分析的核心算法, 该算法的效率决定了网络分析的功能和效率。在大量的最短路算法中, Dijksta算法是一种最经典的方法, 很多算法都是在该算法的基础上经过改进发展而来的。本文就是在详细研究该算法的基础上, 结合矢量数据的拓扑关系, 满足实际应用中的网络分析需求而优化的一种算法。
使用Dijkstra算法基于网络的权矩阵求解最短路问题的计算机算法和程序中, 运用了关联矩阵、邻接矩阵和距离矩阵的概念。在存储图形数据和运算时, 需要定义N×N的数组, 其中N为网络的结点数, 当网络的结点数较大时, 将占用大量的计算机内存。如果不对Dijkstra算法进行优化, 该算法很难在实际中得到应用。
2 运行结果
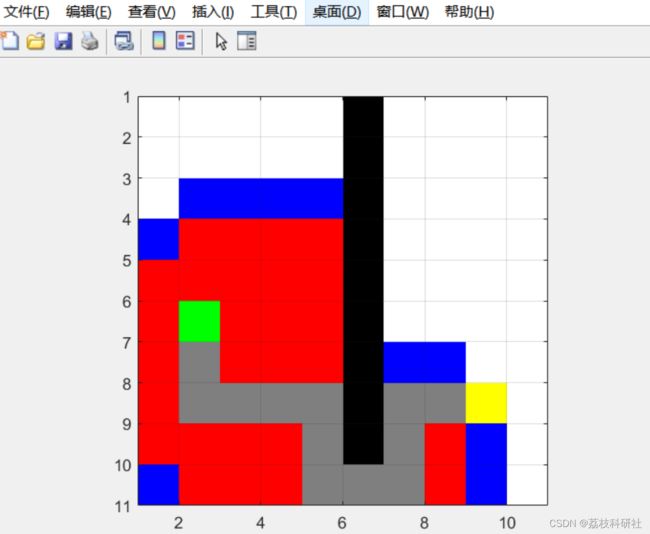

部分代码:
%% Define a small map
map = false(10);
% Add an obstacle
map (1:9, 6) = true;
start_coords = [6, 2];
dest_coords = [8, 9];
%%
close all;
[route, numExpanded] = DijkstraGrid (map, start_coords, dest_coords);
% Uncomment following line to run Astar
[route, numExpanded] = AStarGrid (map, start_coords, dest_coords);
%% Define a small map
map = false(10);
% Add an obstacle
map (1:9, 6) = true;
start_coords = [6, 2];
dest_coords = [8, 9];
%%
close all;
[route, numExpanded] = DijkstraGrid (map, start_coords, dest_coords);
% Uncomment following line to run Astar
[route, numExpanded] = AStarGrid (map, start_coords, dest_coords);
%% Define a small map
map = false(10);
% Add an obstacle
map (1:9, 6) = true;
start_coords = [6, 2];
dest_coords = [8, 9];
%%
close all;
[route, numExpanded] = DijkstraGrid (map, start_coords, dest_coords);
% Uncomment following line to run Astar
[route, numExpanded] = AStarGrid (map, start_coords, dest_coords);
%% Define a small map
map = false(10);
% Add an obstacle
map (1:9, 6) = true;
start_coords = [6, 2];
dest_coords = [8, 9];
%%
close all;
[route, numExpanded] = DijkstraGrid (map, start_coords, dest_coords);
% Uncomment following line to run Astar
[route, numExpanded] = AStarGrid (map, start_coords, dest_coords);
3 Matlab代码实现
4 参考文献
部分理论来源于网络,如有侵权请联系删除。
[1]张福浩,刘纪平,李青元.基于Dijkstra算法的一种最短路径优化算法[J].遥感信息,2004(02):38-41.