miivii域控制器(Xavier)实现TensorRT加速后的Ultra-Fast-Lane-Detection项目
TRT_ONNX2是神力模型转换工具链
鸡汤哥知乎金天
一、配置TRT_ONNX2
1、安装依赖
(2020.09.30更新)昨天刷了JetPack4.4,很好用!只需要下载编译thor即可,其他依赖项原生满足。

(1)TensorRT 7
(2020.09.29更新)TensorRT是深度学习推理(Inference)优化器,主要针对NVIDIA GPU,应用于模型部署、实际预测阶段。TensorRT通过分析深度学习模型,将各层进行横向、纵向合并,减少CUDA对输入/输出张量的读写时间,从而使模型更小、更快、更高效,加速推理过程。Tensorflow\Caffe深度学习框架训练出来的模型,可以直接丢进TensorRT框架中去,对模型进行分析优化。PyTorch\Caffe2等框架训练出来的模型,需要先转化为ONNX通用深度学习模型,然后才能丢进TensorRT中优化。详细的TensorRT介绍参考TensorRT(1)-介绍-使用-安装。
nvidia官网TensorRT各版本下载
Installing TensorRT
(2020.09.28更新)域控制器刷机后自带tensorrt5.1.6.1,鸡汤哥说工具链不支持tensorrt5,因为该版本的很多接口过时了,因此参照安装教程,卸载了自带的tensorrt。
我看了安装教程,主要是安装一些python接口和库,而项目中主要用到tensorrt中的c++库,因此下载TensorRT 7.0.0.11 for Ubuntu 18.04 and CUDA 10.0 tar package(这里还有坑,make时报错今天没有解决),在~/目录下解压,将文件夹重命名为TensorRT,并执行
$ ln -s /home/nvidia/TensorRT /home/nvidia/cola/trt_onnx2
就会在trt_onnx2文件夹下创建一个TensorRT软链接文件,它是软链接到/home/nvidia/TensorRT目录的。
这里有2点要注意:一是安装包解压位置必须是~/,二是必须重命名为TensorRT,这是项目作者在编译规则中制定了的,不这样做make就报错。如图在cmake时,TensorRT的头文件和库文件总是包含在特定路径之下。
![]()
(2)gflags
(2020.10.02更新)JetPack4.4不需要再另外配置gflags
(3)thor
安装编译thor
thor是一个C++库,为深度学习提供大量的工具、算法和可视化模块。
build_full.sh安装完整版,在配置glog时,同时执行了源码安装和sudo apt安装,把环境搞得乱七八糟,导致最后刷机。
build_simple.sh安装简化版本,客服大佬说安装简化版本时,能自动把需要的依赖全部安装上。于是执行了命令build_simple.sh,如愿以偿地报了错:
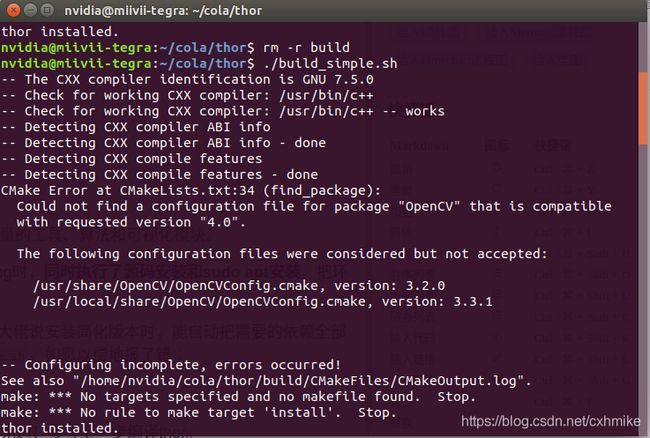
显示需要OpenCV4.0,而在系统中检测出来了3.2.0和3.3.1。欲仙欲死的Xavier配置OpenCV4.0之路开始了:
a. 按照百度上各路大神的“TX2配置OpenCV教程”、“Xavier配置OpenCV攻略”,我需要先执行sudo apt-get purge libopencv*删除系统中现有的opencv,一顿操作过后,我发现/usr/lib/aarch64-linux-gnu中opencv相关的文件都不存在了。然而我进入python,import cv2后,发现一切正常!!这不是我想要的结果啊,我刚才都做了什么??
b. 先不管了,接下来配置4.0.0版本,仍然是参照各路大神的操作,进行源码安装,cmake步骤要了亲命,使用cuda的、不使用cuda的、使用opencv_contrib的,试了各种各样的camke命令,无一例外都失败了,各种闻所未闻见所未见的bug蜂拥而来。。。草泥马
c. 群里请教,有位大佬推荐了一个看起来很牛逼的安装方法,然并卵
d. 最大的疑惑是,系统里从哪冒出来一个3.2.0的版本?
删除CMakeLists.txt里对OpenCV4.0的指定: 时间花了不少,我感觉自己解决不了这个问题,于是请教鸡汤哥。鸡汤哥说把CMakeLists.txt里指定的4.0去掉,不必安装4.0版本。试了下,还真起作用,同时产生了新的问题:

显示找到了opencv3.2.0,谁配置的你?

配置protobuf: 貌似是protobuf没有安装,参考Protobuf安装步骤,protobuf-cpp-3.13.0下载链接,提取码eibq。安装时间大约半天,中间没出什么岔子,protobuf测试参考google protobuf安装与使用,注意两点:一是.proto文件名称是addressbook.proto,二是两个.cpp文件中,包含addressbook.pb.h头文件时要加绝对路径#include "/tmp/address.pb.h",否则会报错找不到该文件。以为一切就绪,然而还是那个错误:

(2020.09,30更新)JetPack4.2和4.4版本都是自带protobuf的,不用另外配置。今天用JetPack4.4试了一下,不需要任何其他操作,./build_simple一次成功。
修改CMakeLists.txt中libprotobuf.so读取路径: 鸡汤哥又提供了一种思路——看看报错提示的那个路径有没有.so,没有就是有问题,有时候有但可能只是残存的错误软链接,把那个文件拷贝下看看。
按照提示自然是不能找到.so文件的,arm架构怎么可能会有x86的路径,我在根目录下搜索了libprotobuf.so,结果是这样的:

.so文件是有的,但不在x86目录下,那么为什么会出现x86这个神奇的路径?我想到编译时需要的各种头文件、库、依赖都是在CMakeLists.txt里指定的,于是打开CMakeLists.txt,果然看到了写死的路径:

- 这种方法是把库的路径写死了,理论上打开第一个注释,就会自动寻找需要的protobuf库,这个有待在新的域控制器上实验,这里就不折腾了。
- 鸡汤哥说自动查找动态库时,默认链接
libprotobuf.a,但是链接.a文件就会出错,因此写死了路径,链接.so。目前没有好的解决办法。
修改.so的路径后终于将thor编译成功

折腾几天,或许最大的收获并不是thor编译成功本身,而是在这个死去活来的过程中,我意识到其实强如鸡汤哥这样的大佬,在面对疑难bug时,也并不能一剑封喉,一上来就找到解决办法,而是在理解编译原理的基础上,找到造成bug的可能原因,然后一个个试验,这是个不断试错的过程。
(4)opencv
Xavier上配置OpenCV,可以说是苦海无边!参考上一步编译thor。
(2020.10.2更新)JetPack4.4刷机后自带OpenCV4.1.1,不需要另外配置。
2、编译
TensorRT的坑在这里:TensorRT/lib/中有两个.so文件不兼容

用readelf命令查看elf格式文件信息,Machine显示x86-64,目前推测原因是:TensorRT安装包是在x86平台上编译生成.so共享库文件,在arm架构上不兼容,暂时没有找到解决办法。

(2020.09.29更新)Nvidia官网上没有看到支持arm架构的TensorRT版本,鸡汤哥说Xavier平台不能单独安装TensorRT等,它们是随JetPack一起烧录进去的。JetPack4.2烧进去的是TensorRT5.1.6.1,问了米文,JetPack烧进的是TensorRT7,下载烧写镜像,刷机。
(2020.09.30更新)刷了JetPack4.2,自带TensorRT7.1.3,OpenCV4.1.1,这两个都不需要另外配置了,只需要下载编译thor。终于编译成功trt_onnx2
二、运行(2020.10.3更新)
1 配置onnx-tensorrt,.onnx 转 .trt
要先配置onnx-tensorrt,将*.onnx模型转换为*.trt模型。参考onnx-tensorrt,下载源码进行编译。
BUG 1 cmake版本太低
参考Jetson TX2上升级cmake方法
BUG 2 源代码下载不完全
third_party/onnx/目录下是空的,进github里一看,onnx这里是一个链接,在third_party/文件夹下源码下载链接对应的源码即可。

BUG 3 $ onnx2trt my_model.onnx -o my_engine.trt报错
![]()
一种方法是:用./onnx2trt代替onnx2trt
另一种方法是:build文件夹路径下,终端执行sudo make install,将编译出来的二进制文件、库、配置文件等放到相应的目录下,参考linux系统应用编译构建:make 、 make all 、 make clean 、 make install 区别,模型转换命令就可以正常执行。


2 检测视频
将上一步转换得到的.trt模型复制到trt_onnx2/models/文件夹下,终端执行命令
$ ./build/examples/demo_ultra_fast_lane_det -trt_f ./models/lx_engine.trt -data_f ../video.mp4

(2020.10.2更新)国庆献礼,终于跑通Ultra Faster Lane Detection TensorRT加速项目!从8月20号来恒大城开始,就一直饱受车道线检测的虐待折磨,时常心如死灰,生无可恋。在找项目,换模型,配环境,解决bug的苦闷日子里,我经常去楼道里锻炼身体来转移注意力,或是去房顶眺望远方,不断地问天问地问自己,这种屡试屡错、原地踏步、毫无进展的日子什么时候才是个头?好在项目和甲方都不允许我放弃,逼我硬着头皮死磕,现在总算看到了胜利的曙光。
现大体总结下在车道线项目我走过的“山路十八弯”:
目标:检测出车道线,并把车道点通过ROS消息发布出去,要求适时性要好。
过程:
(1)a.整个项目都要基于ROS;b.之前试验过传统方法,受光照、阴影、道路磨损、转弯不稳定等诸多因素影响,达不到上车要求,于是我锁定了目标方法的2个条件:基于ROS和深度学习方法。无人驾驶汽车系统入门(三十)——基于深度神经网络LaneNet的车道线检测及ROS实现同时具备了我设定的两个条件,简直不要太爽,因此在这个项目上花费了大量的时间与精力。程序依赖tensorflow和sklearn库,而tf又不好下载,arm上安装难度又大,折腾了一个星期,终于总结出了米文域控制器(基于Xavier)安装tensorflow-gpu,然而在安装成功的时候,我发现烧写的JetPack4.2里面自带tensorflow1.13,欲哭无泪。历经艰难终于把环境配置好,程序的运行又出现了各种各样的版本、模型输入bug,我甚至对着大段大段的报错一行行修改源码,连warning都不放过,然并卵。我怀疑是不是用的模型有问题,试了github源项目作者提供的模型,又试了原始的lanenet模型,都以失败告终。半个月过去了,我的进展只是证明了这个项目跑不通!那时候心态开始崩溃,我被迫彻底放弃了这个我曾经寄予厚望的完美匹配的项目。
(2)在光哥的催问下,我决定退而求其次,先用传统方法实现一个初级版本,之后再探索深度学习方法。传统的OpenCV方法本来是在设定目标条件时就被我排除在外的,但是在项目进度的压力下,实在是没有什么办法。疫情期间,我在家里实现过无人驾驶技术入门(十五)| 再识图像之高级车道线检测,现在只需要把它改造成ROS版本,我对此还是很有信心的。我在域控制器上复制了之前在台式机上正常运行的程序,结果出人意料,失败了。在台式机上运行时,程序有一个致命的bug,有时候会莫名其妙地报“容器不能为空”的bug,锁定了出问题的代码,同时锁定了程序报错时检测的那一帧图片,发现图片里车道线很清晰,光线也还好,上一帧检测的好好的,下一帧就报错。这个问题不会一开始就报错,而是程序运行一段时间过后报错。而在Xavier上,刚运行就报这个错,各种改,各种加判断条件都无济于事。那时候我完全慌了,深度学习方法行不通,传统方法又报错,这个功能是不是就实现不了了???我问师兄要了份他改造过的代码,还是没运行通。心里一慌,根本没办法静下心来再认真看代码、改代码了。我从怀疑代码、怀疑项目,开始怀疑自己,一度觉得每天吃饭都是多余。
(3)与光哥讨论后,看了Nvidia和Autoware,前者准确度太差,后者没有视觉检测车道线模块,也放弃了。
(4)怀疑归怀疑,睁眼起来,项目还是要搞的。我用残存的一点思考力对浪费的将近3周的时间作了小结。OpenCV方法的套路都是大体相同的,代码非常相似。这个运行不通,其他的传统方法一定也不行。这次算是彻底堵死了传统方法的路。但是深度学习方法不一样,框架多,模型多,一个不行可以换另一个。最终确定:**还是要用深度学习方法,因为实在找不到用ROS实现的现成项目,这次没有基于ROS的限制,**只要能运行通就好,基于ROS自己来改。又反复看了lanenet-lane-detection,最终因为报错涉及到模型本身,放弃了。在完成深度学习大作业时,我实现过PINet,回顾了下,发现加入了后处理,每秒只有10帧左右,适时性太差,去掉后处理程序,检测结果太差,放弃。这期间的各种尝试、各种失败,可以看基于ROS的车道线检测项目记录。
(5)实验课期间,请教了班里几个同学,接触到了mana,想着死马当活马医,再试试。先是在miivii域控制器(基于Xavier)上复现Ultra-Fast-Lane-Detection源论文项目,然后就是这篇实现加速项目的记录。自己本来就菜,很多时候大佬的一句话,就需要我花费一天甚至两三天的时间来进行尝试消化,期间各种辛酸真是一言难尽。
死磕40天,今天总算是看到了胜利的曙光,后面ROS版本改造会更复杂,而且基本没有人再指导了。mike加油~~~