使用直流电机和旋转编码器的Arduino PID控制系统(未完)
简介
旋转编码器是可以测量机械旋转的电子设备。它们可以以两种方式使用——作为控制装置或作为测量轴旋转的装置。
当用作控制时,旋转编码器可以比电位器更通用。当你需要非常精确的控制时,它们可以使用,而且它们不受温度的影响。
作为一种测量机械旋转的装置,旋转编码器有多种用途。其中之一是测量直流齿轮马达的旋转。
今天我们将看看这两种类型的旋转编码器。我将向你们展示如何将它们连接到Arduino上,我会给你们一些演示草图,你们可以自己运行。
让我们开始吧!
旋转编码器
旋转编码器,也可称为轴编码器,是一种机电设备,可以将轴的角度位置(旋转)转换为模拟或数字输出信号。我们今天的重点是数字设备。
有两种主要类型的旋转编码器:绝对和增量。不同的是,绝对编码器给出轴的精确位置,以度为单位,而增量编码器报告轴移动了多少增量,但不报告其实际位置。

旋转编码器被用于许多不同的应用,包括工业控制,机器人,光学机械鼠标和轨迹球,数控机床和打印机。
旋转编码器的操作
有几种不同类型的旋转编码器。我将讨论限制在更简单的“增量”编码器上。这些有时被称为正交或相对旋转编码器。
这些编码器有两个传感器,输出两组脉冲。传感器可以是磁(霍尔效应)或光(LED或激光),当编码器轴旋转时产生脉冲。
由于有两个传感器在两个不同的位置,它们都会产生相同的脉冲,然而,它们会失相,因为一个传感器会先于另一个传感器脉冲。哪个传感器先走是由旋转的方向决定的。
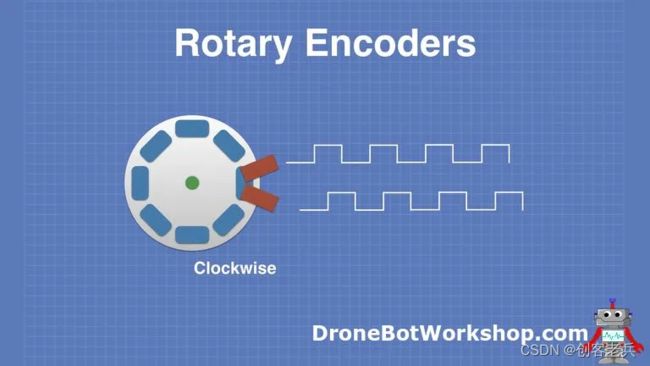
在上面的例子中,编码器轴是顺时针旋转。顶部的传感器在底部的传感器之前被触发,所以顶部的脉冲组先于底部的脉冲组。
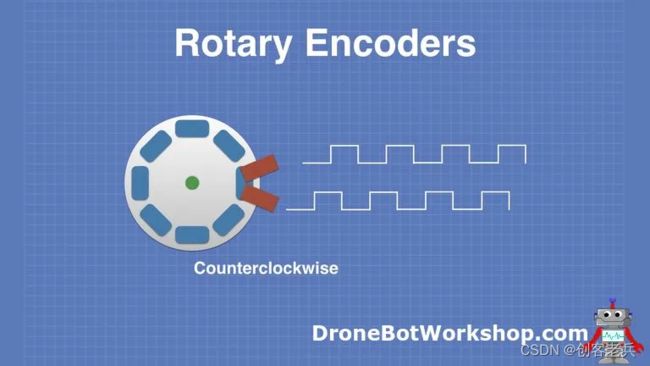
如果编码器轴逆时针旋转,那么底部的脉冲将在顶部的脉冲之前发送。
在这两种情况下,可以通过计数脉冲来确定轴旋转了多少。通过检查哪个脉冲先来,我们可以确定旋转的方向。
控制编码器
我们将要使用的控制编码器是一个非常常见的设备,它可以很容易在网上获得。
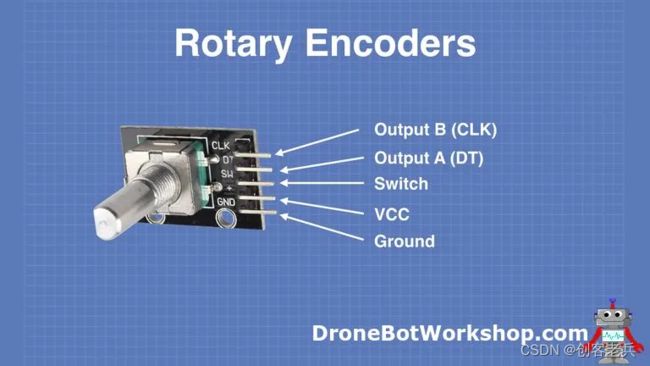 控制编码器引出线
控制编码器引出线
编码器的安装完全像电位器,它有一个可以作为按钮的旋转轴。制编码器的引脚如下:
- GND-接地。
- +V—VCC或正电源电压,通常为3.3伏或5伏。
- SW -按钮开关输出。当轴被压下时,它输出低电平。
- DT -输出A连接。
- CLK -输出B连接。
我将向你展示如何使用这个控制编码器,但首先,让我们看看另一个旋转编码器。
电机编码器
电机编码器安装在直流电机的轴上,可以计算电机轴的移动量。加上一个电机驱动器,这将允许你创建一个反馈机制,允许你指定转数。
你也可以使用这些编码器计来测量轴旋转的转动速度。
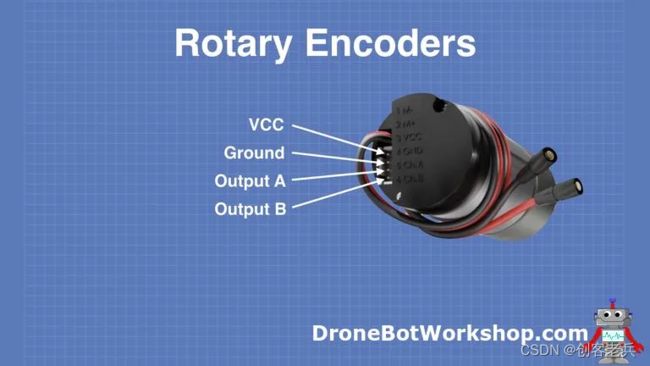 电机编码器引出线
电机编码器引出线
我在这里展示的是一个连接齿轮电机的编码器。其他电机编码器应该有类似的连接。连线非常简单:
- VCC - 5伏电源输入。
- GND -接地。
- CH A -输出A。
- CH B -输出B。
我们很快就会看到如何使用Arduino来测量电机转速。
读取编码器
我们将开始我们的旋转编码器实验使用控制编码器。
用Arduino读取控制编码器实际上是相当直接的。我们只需要读取输入脉冲并计算它们。我们还需要确定哪组脉冲首先出现,这样我们就可以确定旋转的方向。
Arduino控制编码器测试连接
这里是我们将如何钩起我们的第一个旋转编码器实验。
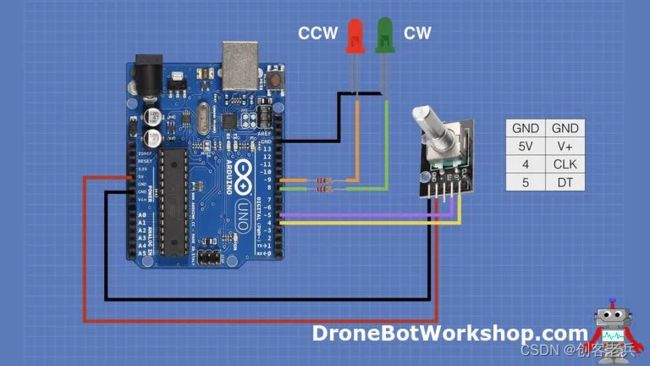
你会注意到,除了旋转编码器,我还添加了一对LED。这些将表明方向,我们正在旋转编码器轴。
两个led的下降电阻是150到470欧姆,在插图中我显示220欧姆的电阻。
顺便说一句,Arduino上使用的引脚都不是关键的。你可以改变它们。
Arduino控制编码器测试草图
现在你已经把编码器和led连接好了,你需要一个代买来让它工作。
Rotary Encoder Demo
rot-encode-demo.ino
Demonstrates operation of Rotary Encoder
Displays results on Serial Monitor
DroneBot Workshop 2019
https://dronebotworkshop.com
*/
// Rotary Encoder Inputs
#define inputCLK 4
#define inputDT 5
// LED Outputs
#define ledCW 8
#define ledCCW 9
int counter = 0;
int currentStateCLK;
int previousStateCLK;
String encdir ="";
void setup() {
// Set encoder pins as inputs
pinMode (inputCLK,INPUT);
pinMode (inputDT,INPUT);
// Set LED pins as outputs
pinMode (ledCW,OUTPUT);
pinMode (ledCCW,OUTPUT);
// Setup Serial Monitor
Serial.begin (9600);
// Read the initial state of inputCLK
// Assign to previousStateCLK variable
previousStateCLK = digitalRead(inputCLK);
}
void loop() {
// Read the current state of inputCLK
currentStateCLK = digitalRead(inputCLK);
// If the previous and the current state of the inputCLK are different then a pulse has occured
if (currentStateCLK != previousStateCLK){
// If the inputDT state is different than the inputCLK state then
// the encoder is rotating counterclockwise
if (digitalRead(inputDT) != currentStateCLK) {
counter --;
encdir ="CCW";
digitalWrite(ledCW, LOW);
digitalWrite(ledCCW, HIGH);
} else {
// Encoder is rotating clockwise
counter ++;
encdir ="CW";
digitalWrite(ledCW, HIGH);
digitalWrite(ledCCW, LOW);
}
Serial.print("Direction: ");
Serial.print(encdir);
Serial.print(" -- Value: ");
Serial.println(counter);
}
// Update previousStateCLK with the current state
previousStateCLK = currentStateCLK;
}