OpenCV/Python:相机标定
这也不是相机标定,只是了解相机标定之前的基础部分
import numpy as np
import cv2
import glob
'''
在这里,我的棋盘格是8*8的,所以角点个数为7*7,当然棋盘格的行列个数可以不一样;
如果想方便代码改变棋盘格数,是以定义两个变量w(列角点数)和h(行角点数),注意如果角点维数超出的话,标定的时候会报错。
'''
w = 7
h = 7
# glob是个文件名管理工具
images = glob.glob('test5/5test12.jpg')
print('...loading')
for fname in images:
# 对每张图片,识别出角点,记录世界物体坐标和图像坐标
print(f'processing img:{fname}')
img = cv2.imread(fname)
gray = cv2.cvtColor(img, cv2.COLOR_BGR2GRAY) # 转灰度
print('grayed')
# 寻找角点,存入corners,ret是找到角点的flag
ret, corners = cv2.findChessboardCornersSB(gray, (w, h),None)
# 如果找到,添加对象点,图像点(精炼后)
if ret == True:
# 绘制并显示角点
# img = cv2.drawChessboardCorners(img, (w,h), corners,ret)
# cv2.getPerspectiveTransform()
a = [10, 20, 30, 40, 50, 60, 70]
dst_pts = np.zeros((49, 2))
for i in range(7):
for j in range(7):
dst_pts[7 * i + j, :] = (a[j], a[i])
dst_pts = dst_pts.reshape(-1, 1, 2)
H, mask = cv2.findHomography(corners, dst_pts)
# H, mask = cv2.findHomography(corners, dst_pts, cv2.RANSAC, 5.0)
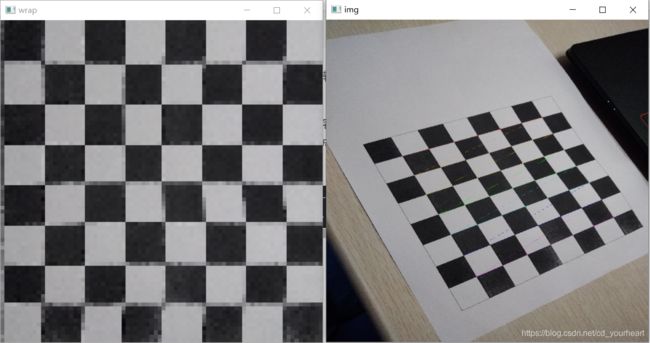
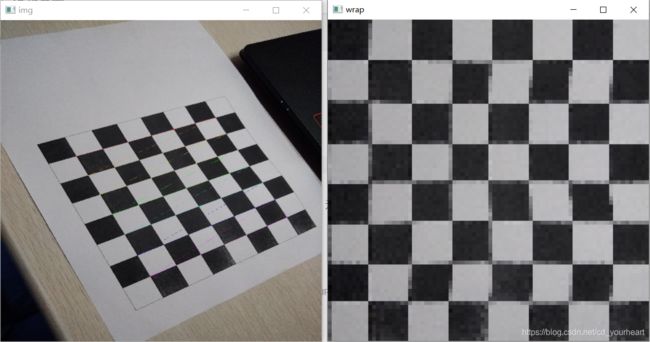
wrap = cv2.warpPerspective(img, H, (80, 80))
img = cv2.drawChessboardCorners(img, (w,h), corners,ret)
cv2.namedWindow('img', 0)
cv2.resizeWindow('img', 500, 500)
cv2.imshow('img', img)
cv2.namedWindow('wrap', 0)
cv2.resizeWindow('wrap', 500, 500)
cv2.imshow('wrap', wrap)
cv2.waitKey()
cv2.destroyAllWindows()
先看一下结果
ret, corners = cv2.findChessboardCornersSB(gray, (w, h),None)
input
gray 灰度图
(w, h) 内角点的行列数
output
ret True or False
corners 角点坐标
img = cv2.drawChessboardCorners(img, (w,h), corners,ret)
input
img 待处理图像
(w,h) 内角点的行列数
corners 角点坐标
ret True or False
output
img 画了角点坐标后的图像
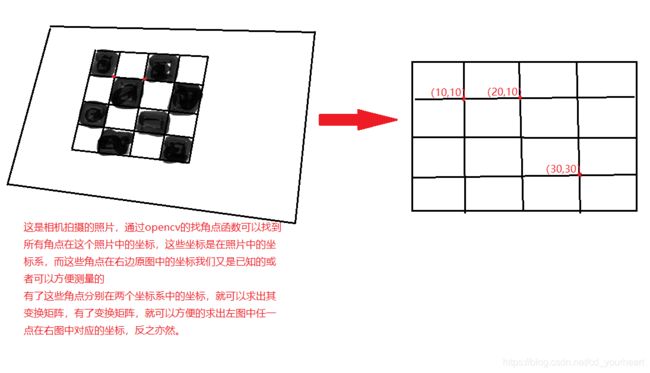
H, mask = cv2.findHomography(corners, dst_pts)
input
corners 角点坐标,shape=(49, 1, 2)
dst_pts 这些角点在原始图像中的坐标,shape=(49, 1, 2)
output
H 变换矩阵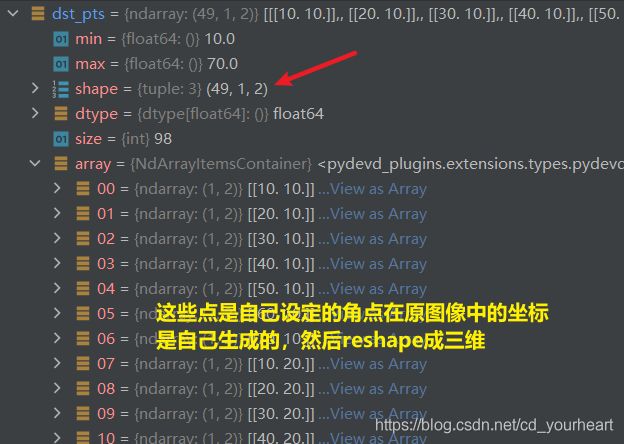

也可以不用findHomography,而使用getPerspectiveTransform测试一下
corners_2D=corners.reshape(-1,2) # 将[49*1*2]降维到[49*2]
corners_2D_4=corners_2D[5:9,:] # 取四个点
H = cv2.getPerspectiveTransform(np.array(corners_2D_4, np.float32), np.array(dst_pts_2D_4, np.float32))要注意的是,getPerspectiveTransform的输入应该为二维的[4*2]的np.float32类型,且返回值只有一个
上面从49个角点中选择的连续四个点,很容易出现问题,因为连续的四个点很容易共线,构不成四边形,或者效果很差,因为是局部的四个点,可以像下面这样,取49个点的四个顶点,这四个点构成的四边形是面积最大的,误差就会小点
corners_2D_4=[corners_2D[0,:],corners_2D[6,:],corners_2D[42,:],corners_2D[48,:]]
dst_pts_2D_4 = [dst_pts_2D[0, :], dst_pts_2D[6, :], dst_pts_2D[42, :], dst_pts_2D[48, :]]