Faster RCNN论文详解
Faster RCNN
建议先阅读之前的RCNN和Fast RCNN后再来阅读此文
Faster RCNN PyTorch实现:https://github.com/codecat0/CV/tree/main/Object_Detection/Faster_RCNN
Faster RCNN提出了Region Proposal Network解决了Fast RCNN中selective search算法提取候选框速度太慢的问题。
1. Faster RCNN初识

conv layers:通过 C N N CNN CNN提取image的feature maps。此feature maps被共享用于后续的层Region Proposal Networl:用于生成region proposals。该层通过softmax判断anchors属于foreground还是background,再利用bounding box regression修正anchors以获得精确的proposalsRoI pooling:该层收集输入的feature maps和proposals,综合这些信息后提取proposal feature maps,送入后续层进行检测classifier:利用proposal feature maps计算proposal的类别,同时再次通过bounding box regression获取检测框最终的精确位置
通过上述Faster RCNN的流程介绍,我们可以知道Faster RCNN与Fast RCNN之间的区别在于提取候选区域的不同,一个是通过训练一个Region Proposal Network来生成,而另一个则是通过Selective Search算法来生成。
接下来,我会重点介绍Region Proposal Network以及其anchor。
2. Faster RCNN详细网络结构
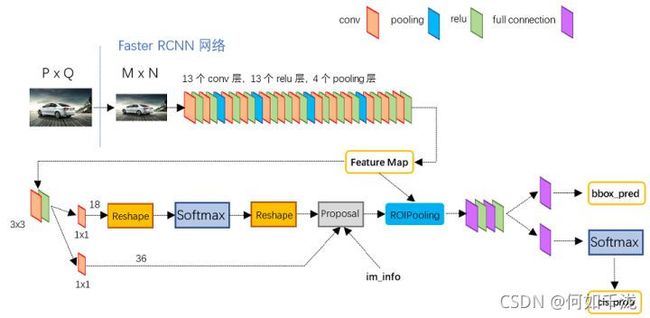
流程: 将一副任意大小 P × Q P \times Q P×Q的图像缩放至固定大小 M × N M \times N M×N,然后将 M × N M \times N M×N大小的图像输入网络;其中conv layers包含了13个conv层+13个relu层+4个pooling层;RPN网络首先经过3x3卷积,再分别生成foreground anchors与bounding box regression偏移量,然后计算出proposals;而Roi Pooling层则利用proposals以及feature maps,提取proposal feature送入后续全连接和softmax网络作classification。
2.1 conv layers

conv layers部分共有13个conv层,13个relu层,4个pooling层(VGG网络中最后一个max pooling前的层)
- 所有的
conv层都是:kernel_size=3 , padding=1 ,stride=1,因此conv层不改变原图大小 - 所有的
pooling层都是:kernel_size=2 ,padding=0 , stride=2,pooling层将原图缩小为原来的一半 - 经过
conv layer后,一个MxN大小的矩阵将变为(M/16)x(N/16)
2.2 Region Proposal Network
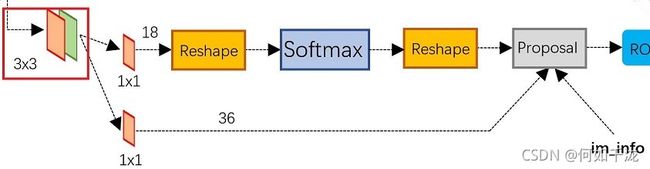
RPN网络分为2条线,上面一条通过softmax分类anchors获得foreground和background(检测目标是foreground),下面一条用于计算anchors的bounding box regression偏移量,以获得精确的proposal。最后的Proposal层则负责综合foreground anchors和bounding box regression偏移量获取proposals
2.2.1 anchors
anchor为由一个中心点,周围生成了9个矩形,其矩形的有3种不同的尺寸,每个尺寸有3种不同的比例,分别为1:1, 1:2, 2:1,这样共9个不同的矩形,如下图左上角所示。
RPN遍历conv layers生成的feature maps,为feature map上的每一个点都配备这9种anchor作为初始的检测框,效果如下图右所示。这样做获得检测框很不准确,之后将会在RPN层,以及最后进行2次的bounding box regression修正检测框位置

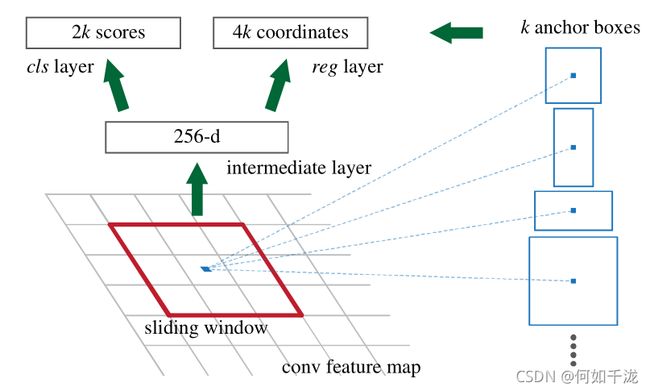
如下图,对于每一个点的 k k k个anchor来说,从feature maps提取出得特征具有256维,对于每一个anchor,需要分foreground与background,因此共有 2 k 2k 2k个score,对于每一个anchor共有 ( x 1 , y 1 , x 2 , y 2 ) (x_1,y_1,x_2,y_2) (x1,y1,x2,y2)四个坐标值。因此共有 4 k 4k 4k个coordinates。
2.2.2 softmax判定foreground与background
确定候选区域标签的规则
- 与某个ground truth(GT)的IoU最大的区域的分配正标签
- 与任意GT的IoU大于0.7的区域分配正标签
- 与所有GT的IoU都小于0.3的区域分配负标签
2.2.3 bounding box regression原理
见RCNN论文详解中的第6部分
2.2.4 RPN流程
- 生成
anchors - 按照输入的
foreground softmax scores由大到小排序anchors,提取前pre_nms_topN个anchors - 限定超出图像边界的
foreground anchors为图像边界 - 剔除非常小(面积和scores)的
foreground anchors - 进行
NMS,按照nms后的foreground softmax scores由大到小排序foreground anchors,提取前post_nms_topN个anchors
2.2.5 RPN 训练
整个网络的Loss如下:
L ( p i , t i ) = 1 N c l s ∑ i L c l s ( p i , p i ∗ ) + λ 1 N r e g ∑ i p i ∗ L r e g ( t i , t i ∗ ) L(p_i,t_i)=\frac {1} {N_{cls}}\sum_{i}L_{cls}(p_i,p_i^*)+\lambda \frac {1}{N_{reg}}\sum_{i}p_i^*L_{reg}(t_i,t_i^*) L(pi,ti)=Ncls1i∑Lcls(pi,pi∗)+λNreg1i∑pi∗Lreg(ti,ti∗)
其中:
-
i i i表示
anchors index -
p i p_i pi表示
foreground softmax probability -
p i ∗ p_i^* pi∗代表对应的
GT predict概率(如果anchor与GT间IOU>0.7,为1;反之IOU<0.3,为0;至于0.3 -
t t t代表
predict bounding box -
t ∗ t^* t∗代表对应
foreground anchor对应的GT box -
cls loss,即softmax loss -
reg loss,即soomth L1 loss。注意在该loss中乘了 p i ∗ p_i^* pi∗相当于只关心foreground anchors的回归
3. RoI Pooling layer
见FAST RCNN论文详解中的第3部分