【mmdetection】RetinaNet解析 以RetinaNet为例 解析目标检测中的anchor生成、匹配、编解码策略
RetinaNet解析
-
- 1. RetinaNet
- 2. 配置文件
-
- backbone
- Neck
- Head
-
- 1. Head构建
- 2. BBox Assigner
-
- 2.1 AnchorGenerator
- 2.2 BBox Assigner
- 3. BBox Encoder/Decoder
- 4. loss计算
- 5. 测试流程
- 总结
- Reference
1. RetinaNet
one-stage detector
- 创新点:RetinaNet网络+Focal loss解决正负样本不平衡
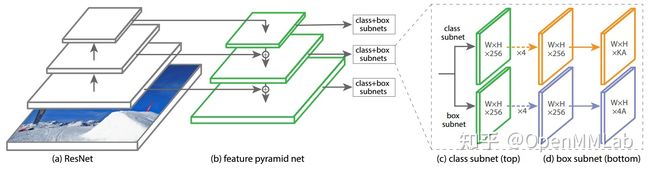
- 结构:backbone + fpn + head (bbox & class)
2. 配置文件
retinanet_r50_fpn.py解析如下:
backbone
- 配置
model = dict(
type='RetinaNet', # model名称
backbone=dict(
type='ResNet', # backbone名称,采用ResNet
depth=50, # ResNet 50
num_stages=4, # ResNet设计范式为 stem + 4_stage,4就表示采用的stage的数量
out_indices=(0, 1, 2, 3), # backbone输出了4张特征图,索引分别为(0,1,2,3),stride分别为(4,8,16,32),输出通道数分别为(256,512,1024,2048)
frozen_stages=1, # 表示冻结stem和第一个stage的权重,不训练
norm_cfg=dict(type='BN', requires_grad=True), # 是否需要进行参数更新
norm_eval=True, # 整个backbone网络的归一化算子变成eval模式,均值和方差采用预训练值,不更新。
# norm_eval控制整个backbone的归一化算子是否需要变成eval模式
style='pytorch',
init_cfg=dict(type='Pretrained', checkpoint='torchvision://resnet50')),
# backbone采用pytorch提供的在imagenet上的预训练权重
out_indices: 一般分类模型都遵循 stem + n_stage + fc_head 的结构,ResNet为 stem+4stage+fc 3个部分。stem输出的stride为4,4个stage的stride分别为4,8,16,32,如 out_indices=(0,) 表示输出stride为4的特征图。backbone后接FPN,需4个feature map。
frozen_stages=-1(不冻结),0(stem),1(stem+stage1),2(stem+stage1+stage2)
参看mmdet/models/backbones/resnet.py,可以看到resnet的构建。
复习卷积/池化的feature map尺寸计算: W ′ = W − F + 2 P S + 1 W'=\frac{W-F+2P}{S}+1 W′=SW−F+2P+1;空洞卷积 W ′ = W − d ( F − 1 ) − 1 + 2 P S + 1 W'=\frac{W-d(F-1)-1+2P}{S}+1 W′=SW−d(F−1)−1+2P+1。(向下取整)实际卷积核大小相当于 d ( F − 1 ) + 1 d(F-1)+1 d(F−1)+1,d为空洞率,在卷积核之间填充(d-1)个0。
- stem:相较于原图的stride=4,输出通道数=64。stem由:conv(+norm+relu)+maxpool构成(依据conv+norm+relu的数量为1还是3,分为stem和deep_stem)。feature map 的尺寸经过conv+maxpool之后缩小了4倍,即stem的stride为4。
def _make_stem_layer(self, in_channels, stem_channels):
if self.deep_stem: # conv + norm + relu + maxpool
self.stem = nn.Sequential(
build_conv_layer(
self.conv_cfg,
in_channels,
stem_channels // 2,
kernel_size=3,
stride=2,
padding=1,
bias=False),
build_norm_layer(self.norm_cfg, stem_channels // 2)[1],
nn.ReLU(inplace=True),
build_conv_layer(
self.conv_cfg,
stem_channels // 2,
stem_channels // 2,
kernel_size=3,
stride=1,
padding=1,
bias=False),
build_norm_layer(self.norm_cfg, stem_channels // 2)[1],
nn.ReLU(inplace=True),
build_conv_layer(
self.conv_cfg,
stem_channels // 2,
stem_channels,
kernel_size=3,
stride=1,
padding=1,
bias=False),
build_norm_layer(self.norm_cfg, stem_channels)[1],
nn.ReLU(inplace=True))
else:
self.conv1 = build_conv_layer(
self.conv_cfg,
in_channels,
stem_channels,
kernel_size=7,
stride=2,
padding=3,
bias=False)
self.norm1_name, norm1 = build_norm_layer(
self.norm_cfg, stem_channels, postfix=1)
self.add_module(self.norm1_name, norm1)
self.relu = nn.ReLU(inplace=True)
self.maxpool = nn.MaxPool2d(kernel_size=3, stride=2, padding=1)
- stage:stride=(1,2,2,2),即经过每个stage,feature map缩小的倍数,相较于原图缩小的倍数分别为4,8,16,32,通道数分别为256,512,1024,2048。构建细节这里不再赘述。
- ResNet的前向过程:只有在 self.out_indices 中的feature map才输出,这里4个stage的feature map全部输出作为后面neck的输入。
def forward(self, x):
"""Forward function."""
if self.deep_stem:
x = self.stem(x)
else:
x = self.conv1(x)
x = self.norm1(x)
x = self.relu(x)
x = self.maxpool(x)
outs = []
for i, layer_name in enumerate(self.res_layers):
res_layer = getattr(self, layer_name)
x = res_layer(x)
if i in self.out_indices:
outs.append(x)
return tuple(outs)
Neck
即FPN
-
结构:

-
配置:
neck=dict(
type='FPN', # 采用FPN作为neck进行特征融合
in_channels=[256, 512, 1024, 2048], # 对应于backbone输出的4个特征图的通道数,即FPN输入4个feature map
out_channels=256, # 每个feature map的输出通道数
start_level=1, # 从索引为1的feature map开始构建特征金字塔,即从通道为512的开始,也就是说FPN只用了后面三个
add_extra_convs='on_input', # 多出来的2个feature map来源,来自于backbone的输出
num_outs=5), # FPN最终输出5个feature map,且通道数均为256
- 代码:
FPN的输出由两部分组成:(1)backbone输出的feature map(start_level=1,即后三张feature map),经过侧向连接+上采样融合;(2)直接由backbone的输出生成额外的feature map
Part 1:backbone输出的后三张feature map进行侧向连接+上采样融合
(1)后三张feature map即c3,c4,c5先分别经过侧向连接(即 self.lateral_convs ,为1*1的卷积),将通道数统一变换为256,即m3,m4,m5;
(2)变换通道后的后三张feature map(m3,m4,m5) ,从最小的m5开始,经过2倍最近邻上采样与m4相加得到新的m4,新m4经过两倍最近邻上采样与m3相加得到新的m3;
(3)未经变化的m5和新融合的m4、m3,经过self.fpn_conv,即 3 ∗ 3 3*3 3∗3卷积,得到最终输出的三个feature map:P3,P4,P5
def forward(self, inputs):
"""Forward function."""
assert len(inputs) == len(self.in_channels)
# build laterals
# 1. 后三个feature map经过1*1卷积的侧向连接将通道数变换为256
laterals = [
lateral_conv(inputs[i + self.start_level])
for i, lateral_conv in enumerate(self.lateral_convs)
]
# build top-down path
# 2. 变换通道后的三张feature map,从尺寸最小的开始进行自顶向下的特征融合,即2倍最近邻上采样和相加
used_backbone_levels = len(laterals)
for i in range(used_backbone_levels - 1, 0, -1):
# In some cases, fixing `scale factor` (e.g. 2) is preferred, but
# it cannot co-exist with `size` in `F.interpolate`.
if 'scale_factor' in self.upsample_cfg:
laterals[i - 1] += F.interpolate(laterals[i],
**self.upsample_cfg)
# build outputs
# part 1: from original levels
# 3. 自顶向下后的三张feature map经过self.fpn_conv,即3*3卷积,得到最终输出的三个feature map
outs = [
self.fpn_convs[i](laterals[i]) for i in range(used_backbone_levels)
]
侧向连接 self.lateral_convs( 1 ∗ 1 1*1 1∗1卷积)和 self.fpn_conv( 3 ∗ 3 3*3 3∗3卷积)构建如下:
self.lateral_convs = nn.ModuleList()
self.fpn_convs = nn.ModuleList()
for i in range(self.start_level, self.backbone_end_level):
l_conv = ConvModule(
in_channels[i],
out_channels,
1,
conv_cfg=conv_cfg,
norm_cfg=norm_cfg if not self.no_norm_on_lateral else None,
act_cfg=act_cfg,
inplace=False)
fpn_conv = ConvModule(
out_channels,
out_channels,
3,
padding=1,
conv_cfg=conv_cfg,
norm_cfg=norm_cfg,
act_cfg=act_cfg,
inplace=False)
self.lateral_convs.append(l_conv)
self.fpn_convs.append(fpn_conv)
Part 2:backbone的输出生成额外两个feature map
(1)额外的feature map来自于input[3],即backbone输出的最后一张feature map:c5
(2) c5经过一个 3 ∗ 3 3*3 3∗3,stride=2,padding=1的卷积,形成第四张feature map:P6(尺寸减半,8,16,32,64)
(3)P6再经过一个 3 ∗ 3 3*3 3∗3,stride=2,padding=1的卷积,形成第五张feature map:P7(尺寸减半,8,16,32,64,128)
额外生成的两个feature map能够提供大的感受野和强语义的特征图,有助于检测大物体。
# part 2: add extra levels
if self.num_outs > len(outs): # 5>3
# use max pool to get more levels on top of outputs
# (e.g., Faster R-CNN, Mask R-CNN)
if not self.add_extra_convs:
for i in range(self.num_outs - used_backbone_levels):
outs.append(F.max_pool2d(outs[-1], 1, stride=2))
# add conv layers on top of original feature maps (RetinaNet)
else:
if self.add_extra_convs == 'on_input':
extra_source = inputs[self.backbone_end_level - 1] # inputs[4-1],额外的feature map 源自input[3],即backbone输出的最后一张feature map
elif self.add_extra_convs == 'on_lateral':
extra_source = laterals[-1]
elif self.add_extra_convs == 'on_output':
extra_source = outs[-1]
else:
raise NotImplementedError
outs.append(self.fpn_convs[used_backbone_levels](extra_source)) # self.fpn_convs[3],即为extra_fpn_conv,将backbone输出的最后一张特征图c5经过一个3*3卷积,apppend到outs中,即得到FPN输出的第四张feature map
for i in range(used_backbone_levels + 1, self.num_outs): # range(4,5),即i取值为4
if self.relu_before_extra_convs:
outs.append(self.fpn_convs[i](F.relu(outs[-1])))
else:
outs.append(self.fpn_convs[i](outs[-1])) # fpn_conv[4]也是extra_fpn_conv,out中的最后一张feature map(即第四张)再次经过一个3*3卷积,append到outs,形成FPN输出的第五张feature map
return tuple(outs)
RetinaNet 中形成额外feature map的卷积的构建:
# add extra conv layers (e.g., RetinaNet)
extra_levels = num_outs - self.backbone_end_level + self.start_level # 5-4+1=2
if self.add_extra_convs and extra_levels >= 1:
for i in range(extra_levels): # 0,1
if i == 0 and self.add_extra_convs == 'on_input':
in_channels = self.in_channels[self.backbone_end_level - 1] # self.inchannels[3]=2048
else:
in_channels = out_channels
# extra_fpn_conv由3*3,stride=2的卷积构成
extra_fpn_conv = ConvModule(
in_channels,
out_channels,
3,
stride=2,
padding=1,
conv_cfg=conv_cfg,
norm_cfg=norm_cfg,
act_cfg=act_cfg,
inplace=False)
# 向之前的self.fpn_conv中再append两个 extra_fpn__conv
self.fpn_convs.append(extra_fpn_conv)
小结:FPN接受backbone输出的四个stage的feature map:c2,c3,c4,c5(记stem输出的为c1),(1)只使用了后三个进行自顶向下的特征融合,形成FPN输出的3个feature map:P3,P4,P5;(2)c5用于生成FPN输出的其他两个feature map:P6,P7用于提供大的感受野、检测大物体。FPN输出的5个feature map通道数均为256,相较于原图的尺寸而言,stride分别为(8,16,32,64,128)。(stem和第一个stage的stride都是4)
Head
- 配置文件
bbox_head=dict(
type='RetinaHead',
num_classes=80, # coco数据集有80类
in_channels=256, # FPN输出的feature map通道数
stacked_convs=4, # head包括分类分支和回归分支,每个分支堆叠4层卷积
feat_channels=256, # 中间的feature map通道数仍为256
anchor_generator=dict(
type='AnchorGenerator',
octave_base_scale=4,
scales_per_octave=3,
ratios=[0.5, 1.0, 2.0],
strides=[8, 16, 32, 64, 128]),
bbox_coder=dict(
type='DeltaXYWHBBoxCoder',
target_means=[.0, .0, .0, .0],
target_stds=[1.0, 1.0, 1.0, 1.0]),
loss_cls=dict(
type='FocalLoss',
use_sigmoid=True,
gamma=2.0,
alpha=0.25,
loss_weight=1.0),
loss_bbox=dict(type='L1Loss', loss_weight=1.0)),
1. Head构建
RetinaHead在mmdet/models/dense_heads/retina_head.py中,继承了AnchorHead类。(one-stage detector的head都在dense_heads中,分为AnchorHead和AnchorFreeHead两类,都继承了BaseDenseHead,所在py文件分别为:base_dense_head.py,anchor_head.py,anchor_free_head.py),复写了 初始化层 和 单尺度特征图前向传播 方法。
从FPN输出的5张feature map,每个单尺度feature map都经过如下的RetinaHead。RetinaHead由类别头和回归头组成。
类别头:self.cls_convs(4个 3 ∗ 3 3*3 3∗3、stride=1、padding=1的卷积)+ self.retina_cls(1个 3 ∗ 3 3*3 3∗3卷积,输出通道数为:anchor数量 ∗ * ∗ 类别数);
回归头:self.reg_convs(4个 3 ∗ 3 3*3 3∗3、stride=1、padding=1的卷积)+ self.retina_reg(1个 3 ∗ 3 3*3 3∗3卷积,输出通道数为:anchor数量 ∗ * ∗ 4)
def _init_layers(self):
"""Initialize layers of the head."""
self.relu = nn.ReLU(inplace=True)
self.cls_convs = nn.ModuleList()
self.reg_convs = nn.ModuleList()
for i in range(self.stacked_convs):
chn = self.in_channels if i == 0 else self.feat_channels
self.cls_convs.append(
ConvModule(
chn,
self.feat_channels,
3,
stride=1,
padding=1,
conv_cfg=self.conv_cfg,
norm_cfg=self.norm_cfg))
self.reg_convs.append(
ConvModule(
chn,
self.feat_channels,
3,
stride=1,
padding=1,
conv_cfg=self.conv_cfg,
norm_cfg=self.norm_cfg))
self.retina_cls = nn.Conv2d(
self.feat_channels,
self.num_anchors * self.cls_out_channels,
3,
padding=1)
self.retina_reg = nn.Conv2d(
self.feat_channels, self.num_anchors * 4, 3, padding=1)
对于单尺度特征图的前向传播过程:
def forward_single(self, x):
"""Forward feature of a single scale level.
Args:
x (Tensor): Features of a single scale level.
Returns:
tuple:
cls_score (Tensor): Cls scores for a single scale level
the channels number is num_anchors * num_classes.
bbox_pred (Tensor): Box energies / deltas for a single scale
level, the channels number is num_anchors * 4.
"""
cls_feat = x
reg_feat = x
for cls_conv in self.cls_convs:
cls_feat = cls_conv(cls_feat)
for reg_conv in self.reg_convs:
reg_feat = reg_conv(reg_feat)
cls_score = self.retina_cls(cls_feat)
bbox_pred = self.retina_reg(reg_feat)
return cls_score, bbox_pred
小结:每个尺度的feature map都要经过一个RetinaHead(包括分类和回归两个head),每层feature map都输出自己这层的预测(两个特征图):cls_score和bbox_pred, RetinaHead最终共输出10个feature map。
这10个特征图作为预测输入到head定义的 loss 函数中,和经过assigner、sampler、encoder的GT bbox进行loss的计算。
2. BBox Assigner
2.1 AnchorGenerator
先对特征图的每个位置生成anchor,然后进行bbox属性分配
anchor_generator=dict(
type='AnchorGenerator',
octave_base_scale=4, # 特征图anchor的bose_scale,值越大,所有anchor的尺度越大
scales_per_octave=3, # 每个特征图有三个尺度
# octave_base_scale 和 scales_per_octave设置时,scales被设置为None,即不能再设置 scales(list[int]) 参数
ratios=[0.5, 1.0, 2.0], # 每个特征图有三个高宽比,从这里可以得出每个特征图上的每个位置有9个anchor
strides=[8, 16, 32, 64, 128]), # 5个特征图对应的相对于原图的stride
RetinaNet一共5个特征图,每个特征图有3个尺度和3个高宽比,即每个特征图的每个位置有9个anchor,大物体/小物体可以通过更改octave_base_scales来控制全局的anchor尺寸。
anchor的生成在 mmdet/core/anchor/anchor_generator.py 中,先看_init_:
(1)多尺度的特征图上的 self.base_sizes :config文件中没有给base_sizes参数,用每个特征图的stride作为该特征图的base_size(如果高、宽的stride不一样,就用高和宽中更小的stride作为该尺度的特征图的base_size)
def __init__(self,
strides, # [8,16,32,64,128]
ratios, # [0.5,1.0,2.0]
scales=None,
base_sizes=None,
scale_major=True,
octave_base_scale=None,
scales_per_octave=None,
centers=None,
center_offset=0.):
# check center and center_offset
# calculate base sizes of anchors
self.strides = [_pair(stride) for stride in strides] # [(8,8),(16,16),(32,32),(64,64),(128,128)]
self.base_sizes = [min(stride) for stride in self.strides # [8,16,32,64,128],没有设置base_size,就用最小stride作为base_sizes
] if base_sizes is None else base_sizes
assert len(self.base_sizes) == len(self.strides), \
'The number of strides should be the same as base sizes, got ' \
f'{self.strides} and {self.base_sizes}'
(2)octave_base_scales+scales_per_octave和scales参数不能同时设置。如果给的是scales参数,就用scales作为尺度 self.scales ;如果给的是octave_base_scales+scales_per_octave,就用: 4 ∗ [ 2 0 3 , 2 1 3 , 2 2 3 ] 4*[2^\frac{0}{3}, 2^\frac{1}{3}, 2^\frac{2}{3}] 4∗[230,231,232] 作为 self.scales ,即: 基本尺度 ∗ 2 i a n c h o r 的 尺 度 数 *2^\frac{i}{anchor的尺度数} ∗2anchor的尺度数i ,i取值为0到anchor的尺度数。
# calculate scales of anchors
assert ((octave_base_scale is not None
and scales_per_octave is not None) ^ (scales is not None)), \
'scales and octave_base_scale with scales_per_octave cannot' \
' be set at the same time'
if scales is not None:
self.scales = torch.Tensor(scales)
elif octave_base_scale is not None and scales_per_octave is not None:
octave_scales = np.array(
[2**(i / scales_per_octave) for i in range(scales_per_octave)])
scales = octave_scales * octave_base_scale
self.scales = torch.Tensor(scales)
else:
raise ValueError('Either scales or octave_base_scale with '
'scales_per_octave should be set')
self.octave_base_scale = octave_base_scale # 4
self.scales_per_octave = scales_per_octave # 3
self.ratios = torch.Tensor(ratios) # [0.5, 1, 2.0]
self.scale_major = scale_major # True
self.centers = centers # None
self.center_offset = center_offset # 0
self.base_anchors = self.gen_base_anchors()
anchor的生成过程如下:
(1)先对 每个feature map 的 单个位置(0,0) 生成base_anchors(映射回了 原图尺度),多个feature map的base_anchors构成一个list:self.base_anchors。
def gen_single_level_base_anchors(self,
base_size,
scales,
ratios,
center=None):
"""Generate base anchors of a single level.
Args:
base_size (int | float): Basic size of an anchor.
scales (torch.Tensor): Scales of the anchor.
ratios (torch.Tensor): The ratio between between the height
and width of anchors in a single level.
center (tuple[float], optional): The center of the base anchor
related to a single feature grid. Defaults to None.
Returns:
torch.Tensor: Anchors in a single-level feature maps.
"""
w = base_size # base_size采用该尺度特征图的stride,如8
h = base_size
if center is None:
x_center = self.center_offset * w # 生成anchor的center为(0,0)
y_center = self.center_offset * h
else:
x_center, y_center = center
h_ratios = torch.sqrt(ratios)
w_ratios = 1 / h_ratios # 比率相乘为1
if self.scale_major: # base_size乘上高宽比、尺度scales,就得到9个anchor在原图的尺度wh值(前面乘以的ws即base_size即stride,恢复到原图大小)
ws = (w * w_ratios[:, None] * scales[None, :]).view(-1)
hs = (h * h_ratios[:, None] * scales[None, :]).view(-1)
else:
ws = (w * scales[:, None] * w_ratios[None, :]).view(-1)
hs = (h * scales[:, None] * h_ratios[None, :]).view(-1)
# use float anchor and the anchor's center is aligned with the
# pixel center
base_anchors = [
x_center - 0.5 * ws, y_center - 0.5 * hs, x_center + 0.5 * ws,
y_center + 0.5 * hs
]
base_anchors = torch.stack(base_anchors, dim=-1)
return base_anchors
对每个feature map都应用上述单尺度(0,0)位置生成anchor的函数,生成5个feature map在(0,0)位置的anchor。即每个feature map都在原图的(0,0)位置生成9个anchor,由于乘的w和h不同,是每个尺度的stride,所以在原图的(0,0)位置生成了5*9个anchor,构成base_anchors。
def gen_base_anchors(self):
"""Generate base anchors.
Returns:
list(torch.Tensor): Base anchors of a feature grid in multiple \
feature levels.
"""
multi_level_base_anchors = []
for i, base_size in enumerate(self.base_sizes):
center = None
if self.centers is not None:
center = self.centers[i]
multi_level_base_anchors.append(
self.gen_single_level_base_anchors(
base_size,
scales=self.scales,
ratios=self.ratios,
center=center))
return multi_level_base_anchors
(Pdb) p len(multi_level_base_anchors)
5
(Pdb) p multi_level_base_anchors[0]
tensor([[-22.6274, -11.3137, 22.6274, 11.3137],
[-28.5088, -14.2544, 28.5088, 14.2544],
[-35.9188, -17.9594, 35.9188, 17.9594],
[-16.0000, -16.0000, 16.0000, 16.0000],
[-20.1587, -20.1587, 20.1587, 20.1587],
[-25.3984, -25.3984, 25.3984, 25.3984],
[-11.3137, -22.6274, 11.3137, 22.6274],
[-14.2544, -28.5088, 14.2544, 28.5088],
[-17.9594, -35.9188, 17.9594, 35.9188]])
(Pdb) p multi_level_base_anchors[1]
tensor([[-45.2548, -22.6274, 45.2548, 22.6274],
[-57.0175, -28.5088, 57.0175, 28.5088],
[-71.8376, -35.9188, 71.8376, 35.9188],
[-32.0000, -32.0000, 32.0000, 32.0000],
[-40.3175, -40.3175, 40.3175, 40.3175],
[-50.7968, -50.7968, 50.7968, 50.7968],
[-22.6274, -45.2548, 22.6274, 45.2548],
[-28.5088, -57.0175, 28.5088, 57.0175],
[-35.9188, -71.8376, 35.9188, 71.8376]])
(2)根据输入特征图尺寸划分gird,即得到特征图上的每个位置相对于(0,0)位置的偏移量(映射回原图坐标),加上base_anchors(0,0位置),即得到单个feature map的每个位置生成的anchors。对每个尺度的特征图都如此操作。
def single_level_grid_anchors(self,
base_anchors,
featmap_size,
stride=(16, 16),
device='cuda'):
"""Generate grid anchors of a single level.
Note:
This function is usually called by method ``self.grid_anchors``.
Args:
base_anchors (torch.Tensor): The base anchors of a feature grid.
featmap_size (tuple[int]): Size of the feature maps.
stride (tuple[int], optional): Stride of the feature map in order
(w, h). Defaults to (16, 16).
device (str, optional): Device the tensor will be put on.
Defaults to 'cuda'.
Returns:
torch.Tensor: Anchors in the overall feature maps.
"""
warnings.warn(
'``single_level_grid_anchors`` would be deprecated soon. '
'Please use ``single_level_grid_priors`` ')
# keep featmap_size as Tensor instead of int, so that we
# can covert to ONNX correctly
feat_h, feat_w = featmap_size # 当前尺度特征图的高、宽
shift_x = torch.arange(0, feat_w, device=device) * stride[0] # [0, feat_w]的range映射回原图
shift_y = torch.arange(0, feat_h, device=device) * stride[1] # [0, feat_h]的range映射回原图
shift_xx, shift_yy = self._meshgrid(shift_x, shift_y) # gird网格
# 如:shift_x.shape:torch.size([152]),shift_y.shape:torch.size([100])
# shift_xx.shape:torch.size([15200]), shift_yy.shape:torch.size([15200])
shifts = torch.stack([shift_xx, shift_yy, shift_xx, shift_yy], dim=-1) # 四个点的偏移量,torch.size([15200,4])
shifts = shifts.type_as(base_anchors)
# first feat_w elements correspond to the first row of shifts
# add A anchors (1, A, 4) to K shifts (K, 1, 4) to get
# shifted anchors (K, A, 4), reshape to (K*A, 4)
# [15200, 9, 4] = [1, 9, 4] + [15200, 1, 4]
all_anchors = base_anchors[None, :, :] + shifts[:, None, :] # [1, 9, 4] + [K, 1, 4]-> [K,9,4]
all_anchors = all_anchors.view(-1, 4) # [9K, 4]
# first A rows correspond to A anchors of (0, 0) in feature map,
# then (0, 1), (0, 2), ...
return all_anchors
def grid_anchors(self, featmap_sizes, device='cuda'):
"""Generate grid anchors in multiple feature levels.
Args:
featmap_sizes (list[tuple]): List of feature map sizes in
multiple feature levels.
device (str): Device where the anchors will be put on.
Return:
list[torch.Tensor]: Anchors in multiple feature levels. \
The sizes of each tensor should be [N, 4], where \
N = width * height * num_base_anchors, width and height \
are the sizes of the corresponding feature level, \
num_base_anchors is the number of anchors for that level.
"""
warnings.warn('``grid_anchors`` would be deprecated soon. '
'Please use ``grid_priors`` ')
assert self.num_levels == len(featmap_sizes)
multi_level_anchors = []
for i in range(self.num_levels):
anchors = self.single_level_grid_anchors(
self.base_anchors[i].to(device),
featmap_sizes[i],
self.strides[i],
device=device)
multi_level_anchors.append(anchors)
return multi_level_anchors
(在anchor_head.py的loss计算中调用了self.get_anchors函数,get_anchors又调用了 self.anchor_generator.grid_anchors 用于生成各个尺度的每个位置的anchor和 self.anchor_generator.valid_flags 。由于collect_fn中有额外的padding操作用于保证一个batch的图像大小相同,self.anchor_generator.valid_flags用于筛选出哪些anchor是在padding以内的。)
小结:(1)对于5张feature map,遍历每张得到(0,0)位置的base_anchors(映射回原图坐标);(2)遍历每张feature map的每个位置(相对于(0,0)位置的偏移),映射回原图;(3)base_anchors加上偏移量即得到每个特征图的每个位置对应到原图坐标的anchor列表。
2.2 BBox Assigner
=========================================================================================
在介绍bbox属性分配前,先看下 IoU计算的代码:
mmdet/core/bbox/iou_calculators/iou2d_calculator.py:调用的是函数 bbox_overlaps(bboxes1, bboxes2,mode=‘iou’, is_aligned=False, eps=1e-6),其中bboxes1和bboxes2分别shape为:[M, 4] 和 [N, 4]。坐标为 ( x m i n , y m i n , x m a x , y m a x ) (x_{min}, y_{min}, x_{max}, y_{max}) (xmin,ymin,xmax,ymax)。返回的IoU的shape为[M, N]
rows = bboxes1.size(-2) # M
cols = bboxes2.size(-2) # N
# 1. 计算bboxes的面积
area1 = (bboxes1[..., 2] - bboxes1[..., 0]) * (bboxes1[..., 3] - bboxes1[..., 1])
area2 = (bboxes2[..., 2] - bboxes2[..., 0]) * (bboxes2[..., 3] - bboxes2[..., 1])
# lt:交叠部分,左下; rb:交叠部分,右上
lt = torch.max(bboxes1[..., :, None, :2], bboxes2[..., None, :, :2]) # [B, rows, cols, 2]
rb = torch.min(bboxes1[..., :, None, 2:], bboxes2[..., None, :, 2:]) # [B, rows, cols, 2]
wh = fp16_clamp(rb - lt, min=0)
overlap = wh[..., 0] * wh[..., 1] # 交集的面积
if mode in ['iou', 'giou']:
union = area1[..., None] + area2[..., None, :] - overlap # 并集的面积
else:
union = area1[..., None]
if mode == 'giou':
enclosed_lt = torch.min(bboxes1[..., :, None, :2], bboxes2[..., None, :, :2])
enclosed_rb = torch.max(bboxes1[..., :, None, 2:], bboxes2[..., None, :, 2:])
eps = union.new_tensor([eps])
union = torch.max(union, eps)
ious = overlap / union # 交并比
if mode in ['iou', 'iof']:
return ious
# calculate gious
enclose_wh = fp16_clamp(enclosed_rb - enclosed_lt, min=0)
enclose_area = enclose_wh[..., 0] * enclose_wh[..., 1]
enclose_area = torch.max(enclose_area, eps)
gious = ious - (enclose_area - union) / enclose_area
return gious
=========================================================================================
接着上一小节生成anchor以后,就该和gt信息一起计算每个anchor的正负样本属性。如下为训练配置,bbox属性分配:
train_cfg=dict(
assigner=dict(
type='MaxIoUAssigner', # 采用最大IoU准则
pos_iou_thr=0.5, # 正样本阈值
neg_iou_thr=0.4, # 负样本阈值
min_pos_iou=0, # 正样本阈值下限
ignore_iof_thr=-1), # 忽略bbox的阈值,-1表示不忽略
allowed_border=-1,
pos_weight=-1,
debug=False),
MaxIoUAssigner分为四个步骤:
- assign every bbox to the background;将所有anchor都初始化为负样本,赋值-1
- assign proposals whose iou with all gts < neg_iou_thr to 0;将每个anchor都和GTs计算IoU并找出最大值,如果该最大值小于neg_iou_thr。则将该anchor匹配为0。
- for each bbox, if the iou with its nearest gt >= pos_iou_thr, assign it to that bbox ;将每个anchor都和GTs计算IoU并找出最大值,如果该最大值>= pos_iou_thr,就把该anchor匹配为IoU最大的bbox的编号;
- for each gt bbox, assign its nearest proposals (may be more than one) to itself;由于(3)中可能有G未得到分配,导致该GT不被认为是前景,因而要通过self.match_low_quality=True配置来补充正样本。具体步骤:对于每个GT,计算与所有anchor的IoU并找出最大值,如果该最大值大于min_pos_iou,就将该anchor分配为该GT的编号。——但如果最大值还是比 min_pos_iou 小,那么还是会有GT不被认为是正样本。
具体代码在mmdet/core/bbox/assigners/max_iou_assigner.py中,参看 assign_wrt_overlaps 函数解析如下:
- 初始化所有anchor为忽略样本,分配-1, 即每个anchor分配到的gt索引:assigned_gt_inds,shape为 [N] . overlaps的shape为 [M, N] ,M为GT bbox的数量,N为anchor bbox的数量。
assigned_gt_inds = overlaps.new_full((num_bboxes, ),
-1,
dtype=torch.long)
- 计算背景样本:
对于每个anchor,和所有GT计算IoU(沿dim=0做max),找出最大的IoU:max_overlaps,以及对应的索引位置argmax_overlaps;
对于每个GT,和所有anchors计算IoU(沿dim=1做max),找出最大IoU:gt_max_overlaps,以及对应的索引位置 gt_argmax_overlaps
# overlaps 的shape为: [num_gt, num_anchor_bbox]
max_overlaps, argmax_overlaps = overlaps.max(dim=0) # (arg)max_ovverlaps.shape:[num_anchor_bbox]
gt_max_overlaps, gt_argmax_overlaps = overlaps.max(dim=1)
如果 max_overlaps小于 neg_iou_thr 或者该 max_overlaps 在背景阈值范围内,就将该anchor对应的索引值设置为0,表示背景样本(负样本)
# 2. assign negative: below
# the negative inds are set to be 0
if isinstance(self.neg_iou_thr, float):
assigned_gt_inds[(max_overlaps >= 0)
& (max_overlaps < self.neg_iou_thr)] = 0
elif isinstance(self.neg_iou_thr, tuple):
assert len(self.neg_iou_thr) == 2
assigned_gt_inds[(max_overlaps >= self.neg_iou_thr[0])
& (max_overlaps < self.neg_iou_thr[1])] = 0
- 计算正样本:
对于每个 max_overlaps 大于正样本阈值的anchor,设置其对应的索引值为:原先的索引值加1。这一步引入的是高质量正样本。
# 3. assign positive: above positive IoU threshold
pos_inds = max_overlaps >= self.pos_iou_thr
assigned_gt_inds[pos_inds] = argmax_overlaps[pos_inds] + 1
- 补充正样本:
由于第3步中可能有GT没有分配到anchor,所以还需要计算每个GT与所有anchor的IoU,将最大IoU对应的anchor分配给该GT,即负责该GT的预测。如果对于最大IoU对应了多个anchor(参数self.gt_max_assign_all),那么就把这些anchor全部划分为负责该GT的正样本。这一步引入了大量的低质量正样本。
如下表所示:

第3步:box李四负责GT王五,box路人1负责GT王五,box路人2负责GT王五。这一步就导致GT张三被忽略,没有匹配到任何的anchor负责预测,因而需要第四步。
第4步:对于GT王五,分配到box李四负责,对于GT张三,分配到box李四负责。显然这两步的bbox是有重叠的。即box李四到底是负责哪个GT呢?这和GT的 遍历顺序 有关,谁在后面的顺序遍历的,该box就负责那个GT。
总之,一个GT可以由多个bbox负责预测,但一个bbox只能负责预测一个GT。
目标检测正负样本区分策略和平衡策略总结(一)
if self.match_low_quality:
# Low-quality matching will overwrite the assigned_gt_inds assigned
# in Step 3. Thus, the assigned gt might not be the best one for
# prediction.
# For example, if bbox A has 0.9 and 0.8 iou with GT bbox 1 & 2,
# bbox 1 will be assigned as the best target for bbox A in step 3.
# However, if GT bbox 2's gt_argmax_overlaps = A, bbox A's
# assigned_gt_inds will be overwritten to be bbox B.
# This might be the reason that it is not used in ROI Heads.
for i in range(num_gts):
if gt_max_overlaps[i] >= self.min_pos_iou:
if self.gt_max_assign_all:
max_iou_inds = overlaps[i, :] == gt_max_overlaps[i]
assigned_gt_inds[max_iou_inds] = i + 1
else:
assigned_gt_inds[gt_argmax_overlaps[i]] = i + 1
【注】加1原因:负样本分配为0,加1是为了不和负样本混淆,后面在为GT分配label时,又进行了索引值减1。
if gt_labels is not None:
assigned_labels = assigned_gt_inds.new_full((num_bboxes, ), -1) # 为bbox分配label
pos_inds = torch.nonzero(
assigned_gt_inds > 0, as_tuple=False).squeeze() # [163206]
if pos_inds.numel() > 0: # 57
assigned_labels[pos_inds] = gt_labels[
assigned_gt_inds[pos_inds] - 1]
else:
assigned_labels = None
return AssignResult(
num_gts, assigned_gt_inds, max_overlaps, labels=assigned_labels)
最终,assigned_gt_inds中,忽略样本为-1,负样本为0,正样本为对应的GT索引值+1。(比如有5个GT,某个anchor对应第三个,索引为2,那么分配给该anchor的inds值为3),这样一来,所有正样本分配的值都是大于0的,只要判断大于0即为正样本,用于分配label。
【小结】:
- 如果 anchor 和所有 gt bbox 的最大 iou 值小于 neg_iou_thr,那么该 anchor 就是背景样本;
- 如果 anchor 和所有 gt bbox 的最大 iou 值大于等于 pos_iou_thr,那么该 anchor 就是高质量正样本;
- 如果 gt bbox 和所有 anchor 的最大 iou 值大于等于min_pos_iou,(即使比pos_iou_trh小,但只要大于min_pos_iou,也视为正样本)那么该 gt bbox 所对应的 anchor 也是正样本。每个 gt bbox 都一定有至少一个 anchor 匹配,而一个anchor只能负责预测一个gt;
- 其余样本全部为忽略样本即 anchor 和所有 gt bbox 的最大 iou 值处于 [neg_iou_thr, pos_iou_thr) 区间的 anchor 为忽略样本,不计算 loss
至此,anchor的生成和正负样本匹配策略就分析完成了。
3. BBox Encoder/Decoder
为了更好地平衡多任务分支的loss,在训练过程中引入anchor信息,需要进一步对 bbox 进行编解码操作。RetinaNet使用的是DeltaXYWHBBoxCoder,配置也在bbox_head中,配置文件如下:
bbox_coder=dict(
type='DeltaXYWHBBoxCoder',
target_means=[.0, .0, .0, .0],
target_stds=[1.0, 1.0, 1.0, 1.0]),
详细代码在:mmdet/core/bbox/coder/delta_xywh_bbox_coder.py
- 计算proposal和gt的中心坐标、宽高
- 计算delta值: d x = x − x a w a dx=\frac{x-x_a}{w_a} dx=wax−xa, d y = y − y a h a dy=\frac{y-y_a}{h_a} dy=hay−ya, d w = l o g w w a dw=log\frac{w}{wa} dw=logwaw, d h = l o g h h a dh=log\frac{h}{h_a} dh=loghah。其中,xy、wh表示GT的中心坐标与宽高,xa、ya、wa、ha表示anchor的中心坐标和宽高。
def bbox2delta(proposals, gt, means=(0., 0., 0., 0.), stds=(1., 1., 1., 1.)):
"""Compute deltas of proposals w.r.t. gt.
We usually compute the deltas of x, y, w, h of proposals w.r.t ground
truth bboxes to get regression target.
This is the inverse function of :func:`delta2bbox`.
Args:
proposals (Tensor): Boxes to be transformed, shape (N, ..., 4)
gt (Tensor): Gt bboxes to be used as base, shape (N, ..., 4)
means (Sequence[float]): Denormalizing means for delta coordinates
stds (Sequence[float]): Denormalizing standard deviation for delta
coordinates
Returns:
Tensor: deltas with shape (N, 4), where columns represent dx, dy,
dw, dh.
"""
assert proposals.size() == gt.size()
proposals = proposals.float()
gt = gt.float()
px = (proposals[..., 0] + proposals[..., 2]) * 0.5
py = (proposals[..., 1] + proposals[..., 3]) * 0.5
pw = proposals[..., 2] - proposals[..., 0]
ph = proposals[..., 3] - proposals[..., 1]
gx = (gt[..., 0] + gt[..., 2]) * 0.5
gy = (gt[..., 1] + gt[..., 3]) * 0.5
gw = gt[..., 2] - gt[..., 0]
gh = gt[..., 3] - gt[..., 1]
dx = (gx - px) / pw
dy = (gy - py) / ph
dw = torch.log(gw / pw)
dh = torch.log(gh / ph)
deltas = torch.stack([dx, dy, dw, dh], dim=-1)
means = deltas.new_tensor(means).unsqueeze(0)
stds = deltas.new_tensor(stds).unsqueeze(0)
deltas = deltas.sub_(means).div_(stds)
return deltas
4. loss计算
RetinaNet提出Focal loss,用于解决难易样本数量不平衡问题。
Focal loss是Cross Entropy loss 的动态加权版本。交叉熵损失函数如下:

对于正样本,y=1,预测的概率p越大,loss越小;
对于负样本,y=0,预测的概率p越小,loss越小。
但是上述表达式对于正负样本、难易样本都”一视同仁“。(最终总的loss是将每一个样本对应的loss相加,所有样本权重一致).
(1) 引入参数 α \alpha α解决 正负样本不平衡:
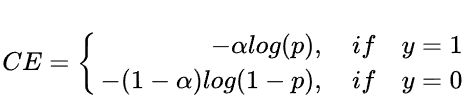
取 α \alpha α为0.25。虽然解决了正负样本不平衡问题,但对于难易样本的权重并没有做区分。
(2) 引入参数 γ \gamma γ解决 难易样本:
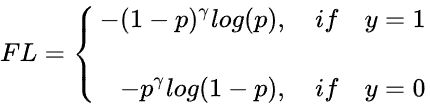
将简单样本(对正样本而言,即预测概率p高)的loss进一步降低,困难样本(对正样本而言,即预测概率p低)的loss进一步升高。
最终的Focal loss形式结合了(1)(2),如下所示:

α \alpha α是正负样本加权参数,值越大,正样本权重越高;
γ \gamma γ是难易样本的加权参数,值越大,对错分样本(困难样本权重大)的梯度越大,focal效应越强。
实验表明: γ \gamma γ取2, α \alpha α取0.25效果最佳。
5分钟理解Focal Loss与GHM——解决样本不平衡利器
Focal loss的配置如下:
loss_cls=dict(
type='FocalLoss',
use_sigmoid=True,
gamma=2.0,
alpha=0.25,
loss_weight=1.0),
Focal loss计算的详细代码:
pred_sigmoid = pred.sigmoid()
target = target.type_as(pred)
pt = (1 - pred_sigmoid) * target + pred_sigmoid * (1 - target)
focal_weight = (alpha * target + (1 - alpha) *
(1 - target)) * pt.pow(gamma)
loss = F.binary_cross_entropy_with_logits(
pred, target, reduction='none') * focal_weight
if weight is not None:
if weight.shape != loss.shape:
if weight.size(0) == loss.size(0):
# For most cases, weight is of shape (num_priors, ),
# which means it does not have the second axis num_class
weight = weight.view(-1, 1)
else:
# Sometimes, weight per anchor per class is also needed. e.g.
# in FSAF. But it may be flattened of shape
# (num_priors x num_class, ), while loss is still of shape
# (num_priors, num_class).
assert weight.numel() == loss.numel()
weight = weight.view(loss.size(0), -1)
assert weight.ndim == loss.ndim
loss = weight_reduce_loss(loss, weight, reduction, avg_factor)
return loss
而对于回归采用的是 L1 loss:
loss_bbox=dict(type='L1Loss', loss_weight=1.0)
5. 测试流程
test_cfg=dict(
nms_pre=1000, # 对于每个feature map,nms前按照score大小,保留前1000个box
min_bbox_size=0,
score_thr=0.05, # 分值阈值
nms=dict(type='nms', iou_threshold=0.5), # nms阈值
max_per_img=100) # 所有feature map的bbox统一进行nms,最后每张图片最多保留100个bbox
总结
本文以RetinaNet为例,结合mmdetection中的代码详细分析了 one-stage detector 的构建以及训练测试流程,尤其是anchor-based方法的anchor生成、正负样本分配、以及bbox编解码策略。此外,还对 Focal loss进行了解析。对于bbox采样策略将在后续的Faster RCNN解读中进行详细分析。
【持续补充更新…】
Reference
[github]openmmlab/mmdetection
轻松掌握 MMDetection 中常用算法(一):RetinaNet 及配置详解
目标检测正负样本区分策略和平衡策略总结(一)
5分钟理解Focal Loss与GHM——解决样本不平衡利器
Focal Loss for Dense Object Detection