机器人学-正运动学
提示:文章写完后,目录可以自动生成,如何生成可参考右边的帮助文档
文章目录
- 前言
- DH约定
- 正运动学
- 总结
前言
本文介绍串联机械臂基础算法,并使用python和matlab进行算法设计、建模仿真。
一、DH约定
标准DH配置

坐标系示意图
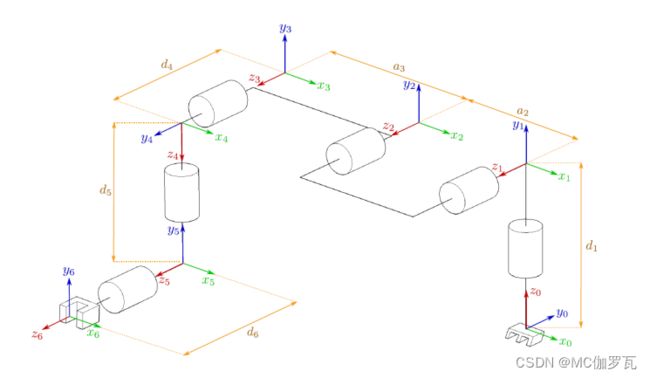
DH参数

二、正运动学
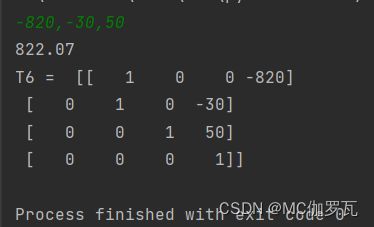
1.求解末端执行器矩阵
代码如下(python):
import numpy as np
import math
"""
FR5的DH参数配置
Link i θi di ai αi
1 152 pi/2
2 -425
3 -395
4 130 pi/2
5 102 -pi/2
6 100
"""
def DH():
A1 = np.array([[1,0,0,0],[0,0,-1,0],[0,1,0,152],[0,0,0,1]])
A2 = np.array([[1,0,0,-425],[0,1,0,0],[0,0,1,0],[0,0,0,1]])
A3 = np.array([[1,0,0,-395],[0,1,0,0],[0,0,1,0],[0,0,0,1]])
A4 = np.array([[1,0,0,0],[0,0,-1,0],[0,1,0,130],[0,0,0,1]])
A5 = np.array([[1,0,0,0],[0,0,-1,0],[0,1,0,102],[0,0,0,1]])
A6 = np.array([[1,0,0,0],[0,0,-1,0],[0,1,0,100],[0,0,0,1]])
T6 = np.dot(A1,np.dot(A2,np.dot(A3,np.dot(A4,np.dot(A5,A6)))))
print("T6 = ",T6)
def InverseKinematics(x,y,z,rx,ry,rz):
pass
def ForwardKinematics(j1,j2,j3,j4,j5,j6):
pass
def distance(a,b,c):
d=pow(a**2+b**2+c**2,1/2)
return d
if __name__ == "__main__":
x, y, z = input().split(",")
d = distance(float(x), float(y), float(z))
print("{:.2f}".format(d))
DH()末端执行器矩阵:
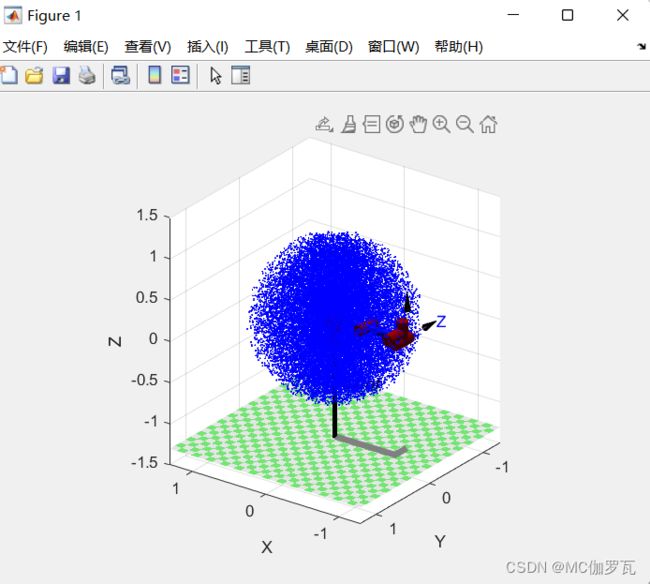
2.工作空间
代码如下(matlab):
clear;
clc;
L(1) = Link('revolute','d',0.152,'a',0,'alpha',pi/2);
L(2) = Link('revolute','d',0,'a',-0.425,'alpha',0);
L(3) = Link('revolute','d',0,'a',-0.395,'alpha',0);
L(4) = Link('revolute','d',0.130,'a',0,'alpha',pi/2);
L(5) = Link('revolute','d',0.102,'a',0,'alpha',-pi/2);
L(6) = Link('revolute','d',0.100,'a',0,'alpha',0);
Five_dof = SerialLink(L,'name','6-dof');
Five_dof.base = transl(0,0,0);
L(1).qlim = [-179,179]/180*pi;
L(2).qlim = [-269,89]/180*pi;
L(3).qlim = [-162,162]/180*pi;
L(4).qlim = [-269,89]/180*pi;
L(5).qlim = [-179,179]/180*pi;
L(6).qlim = [-179,179]/180*pi;
num = 30000;
P = zeros(num,3);
for i = 1:num
q1 = L(1).qlim(1) + rand*(L(1).qlim(2) - L(1).qlim(1));
q2 = L(2).qlim(1) + rand*(L(2).qlim(2) - L(2).qlim(1));
q3 = L(3).qlim(1) + rand*(L(3).qlim(2) - L(3).qlim(1));
q4 = L(4).qlim(1) + rand*(L(4).qlim(2) - L(4).qlim(1));
q5 = L(5).qlim(1) + rand*(L(5).qlim(2) - L(5).qlim(1));
q6 = L(6).qlim(1) + rand*(L(6).qlim(2) - L(6).qlim(1));
q = [q1 q2 q3 q4 q5 q6];
T = Five_dof.fkine(q);
P(i,:) = transl(T);
end
plot3(P(:,1),P(:,2),P(:,3),'b.','markersize',1);
% axis([-1.5 1.5 -1.5 1.5 -0.5 1.5])
hold on
grid on
daspect([1 1 1]);
view([45 45]);
Five_dof.plot([0 0 0 0 0 0])
%%
clf
hold on
axis([-1.5 1.5 -1.5 1.5 -1.5 2]);
for i = 1:num
q1 = L(1).qlim(1) + rand*(L(1).qlim(2) - L(1).qlim(1));
q2 = L(2).qlim(1) + rand*(L(2).qlim(2) - L(2).qlim(1));
q3 = L(3).qlim(1) + rand*(L(3).qlim(2) - L(3).qlim(1));
q4 = L(4).qlim(1) + rand*(L(4).qlim(2) - L(4).qlim(1));
q5 = L(5).qlim(1) + rand*(L(5).qlim(2) - L(5).qlim(1));
q6 = L(6).qlim(1) + rand*(L(6).qlim(2) - L(6).qlim(1));
q = [q1 q2 q3 q4 q5 q6];
T = Five_dof.fkine(q);
Five_dof.plot(q);
[x,y,z] = transl(T);
plot3(x,y,z,'b.','markersize',1)
end工作空间模型:
总结
以上就是今天要讲的内容,本文仅仅简单介绍了机器人正运动学基础算法实现。