(14)点云数据处理学习——RGBD 里程计
1、主要参考
(1)官网
RGBD Odometry — Open3D 0.16.0 documentation
2、原理和实现
2.1 RGBD Odometry主要作用
RGBD里程计在两个连续的RGBD图像对之间查找相机运动。输入是RGBDImage的两个实例。输出是刚体变换形式的运动。Open3D实现了[Steinbrucker2011]和[Park2017]的方法。
2.2读取摄像机内参
我们首先从json文件中读取相机内参矩阵
(1)代码
import open3d as o3d
import numpy as np
redwood_rgbd = o3d.data.SampleRedwoodRGBDImages()
pinhole_camera_intrinsic = o3d.io.read_pinhole_camera_intrinsic(
redwood_rgbd.camera_intrinsic_path)
print(pinhole_camera_intrinsic.intrinsic_matrix)(2)结果
[[525. 0. 319.5]
[ 0. 525. 239.5]
[ 0. 0. 1. ]]
实际上读取了这个json
(3)json中的内容如下
{
"width" : 640,
"height" : 480,
"intrinsic_matrix" :
[
525.0,
0,
0,
0,
525.0,
0,
319.5,
239.5,
1
]
}
注意:
Open3D中的许多小型数据结构都可以从json文件中读取/写入。这包括相机内参,相机轨迹,姿态图等。
2.3读取RGBD图
(1)描述
该代码块读取两对Redwood格式的RGBD图像。我们参考Redwood数据集进行全面解释。
(2)代码
import open3d as o3d
import numpy as np
redwood_rgbd = o3d.data.SampleRedwoodRGBDImages()
pinhole_camera_intrinsic = o3d.io.read_pinhole_camera_intrinsic(
redwood_rgbd.camera_intrinsic_path)
print(pinhole_camera_intrinsic.intrinsic_matrix)
source_color = o3d.io.read_image(redwood_rgbd.color_paths[0])
source_depth = o3d.io.read_image(redwood_rgbd.depth_paths[0])
target_color = o3d.io.read_image(redwood_rgbd.color_paths[1])
target_depth = o3d.io.read_image(redwood_rgbd.depth_paths[1])
source_rgbd_image = o3d.geometry.RGBDImage.create_from_color_and_depth(
source_color, source_depth)
target_rgbd_image = o3d.geometry.RGBDImage.create_from_color_and_depth(
target_color, target_depth)
target_pcd = o3d.geometry.PointCloud.create_from_rgbd_image(
target_rgbd_image, pinhole_camera_intrinsic)注意:Open3D假设彩色图像和深度图像是同步的,并在同一坐标框架中进行配准。这通常可以通过打开RGBD相机设置中的同步和注册功能来实现。
2.4从两个匹配的RGBD图像计算里程数
(1)代码
import open3d as o3d
import numpy as np
redwood_rgbd = o3d.data.SampleRedwoodRGBDImages()
pinhole_camera_intrinsic = o3d.io.read_pinhole_camera_intrinsic(
redwood_rgbd.camera_intrinsic_path)
print(pinhole_camera_intrinsic.intrinsic_matrix)
#(一)2.3读取RGBD图
source_color = o3d.io.read_image(redwood_rgbd.color_paths[0])
source_depth = o3d.io.read_image(redwood_rgbd.depth_paths[0])
target_color = o3d.io.read_image(redwood_rgbd.color_paths[1])
target_depth = o3d.io.read_image(redwood_rgbd.depth_paths[1])
source_rgbd_image = o3d.geometry.RGBDImage.create_from_color_and_depth(
source_color, source_depth)
target_rgbd_image = o3d.geometry.RGBDImage.create_from_color_and_depth(
target_color, target_depth)
target_pcd = o3d.geometry.PointCloud.create_from_rgbd_image(
target_rgbd_image, pinhole_camera_intrinsic)
option = o3d.pipelines.odometry.OdometryOption()
odo_init = np.identity(4)
print(option)
#(二)2.4从两个匹配的RGBD图像计算里程数
[success_color_term, trans_color_term,
info] = o3d.pipelines.odometry.compute_rgbd_odometry(
source_rgbd_image, target_rgbd_image, pinhole_camera_intrinsic, odo_init,
o3d.pipelines.odometry.RGBDOdometryJacobianFromColorTerm(), option)
[success_hybrid_term, trans_hybrid_term,
info] = o3d.pipelines.odometry.compute_rgbd_odometry(
source_rgbd_image, target_rgbd_image, pinhole_camera_intrinsic, odo_init,
o3d.pipelines.odometry.RGBDOdometryJacobianFromHybridTerm(), option)OdometryOption class.
iteration_number_per_pyramid_level = [ 20, 10, 5, ]
depth_diff_max = 0.030000
depth_min = 0.000000
depth_max = 4.000000
注意:上述这个代码块调用两个不同的RGBD里程数方法。第一个来自[Steinbrucker2011]。它使对齐图像的照片一致性最小化。第二个来自[Park2017]。除了照片一致性,它还实现了几何约束。这两个函数的运行速度相似,但[Park2017]在我们的基准数据集测试中更准确,因此是推荐的方法。
(3)关于OdometryOption()的参数
- minimum_answdence_ratio:对齐后,测量两张RGBD图像的重叠率。如果两个RGBD图像的重叠区域小于规定的比例,则里程表模块认为这是一个失败的情况。
- depth_diff_max:在深度图像域中,如果两个对齐像素的深度差小于指定值,则认为对应。数值越大,搜索越激进,但容易导致搜索结果不稳定。
- depth_min和depth_max:小于或大于指定深度值的像素将被忽略。
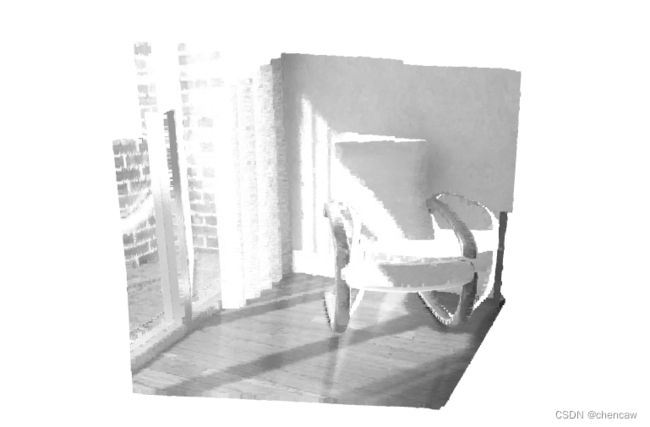
2.5 可视化RGBD图像对(Visualize RGBD image pairs)
(1)描述
RGBD图像对被转换为点云并一起渲染。请注意,表示第一个(源)RGBD图像的点云是用里程计估计的转换进行转换的。在这个转换之后,两个点云都对齐了。
(2)代码
if success_color_term:
print("Using RGB-D Odometry")
print(trans_color_term)
source_pcd_color_term = o3d.geometry.PointCloud.create_from_rgbd_image(
source_rgbd_image, pinhole_camera_intrinsic)
source_pcd_color_term.transform(trans_color_term)
o3d.visualization.draw_geometries([target_pcd, source_pcd_color_term],
zoom=0.48,
front=[0.0999, -0.1787, -0.9788],
lookat=[0.0345, -0.0937, 1.8033],
up=[-0.0067, -0.9838, 0.1790])
if success_hybrid_term:
print("Using Hybrid RGB-D Odometry")
print(trans_hybrid_term)
source_pcd_hybrid_term = o3d.geometry.PointCloud.create_from_rgbd_image(
source_rgbd_image, pinhole_camera_intrinsic)
source_pcd_hybrid_term.transform(trans_hybrid_term)
o3d.visualization.draw_geometries([target_pcd, source_pcd_hybrid_term],
zoom=0.48,
front=[0.0999, -0.1787, -0.9788],
lookat=[0.0345, -0.0937, 1.8033],
up=[-0.0067, -0.9838, 0.1790])(3)结果
Using RGB-D Odometry
[[ 9.99988286e-01 -7.53983409e-05 -4.83963172e-03 2.74054550e-04]
[ 1.83909052e-05 9.99930634e-01 -1.17782559e-02 2.29634918e-02]
[ 4.84018408e-03 1.17780289e-02 9.99918922e-01 6.02121265e-04]
[ 0.00000000e+00 0.00000000e+00 0.00000000e+00 1.00000000e+00]]
Using Hybrid RGB-D Odometry
[[ 9.99992973e-01 -2.51084541e-04 -3.74035273e-03 -1.07049775e-03]
[ 2.07046059e-04 9.99930714e-01 -1.17696227e-02 2.32280983e-02]
[ 3.74304875e-03 1.17687656e-02 9.99923740e-01 1.40592054e-03]
[ 0.00000000e+00 0.00000000e+00 0.00000000e+00 1.00000000e+00]]
