【Robot学习 4 】Gmapping 算法学习
机器人地图一般分为三种类型:栅格地图,拓扑地图,特征地图
机器人在创建地图时,使用多个传感器融合数据,提高创建地图的精度『内部传感器数据的融合通过卡尔满滤波完成,在长时间的运行时会有较大的误差,可以通过外部的激光传感器或者深度相机进行机器人位置和姿态的修正
数据关联:1.已经存在的环境特征2.新的环境特征3.噪声数据
机器人对采集回来的数据(观测值)进行分析,若为已经存在的数据,则利用这一新的观测值去矫正已经在地图中存在的位置特征和地图信息
若为新数据,则增加到地图信息中,并更新地图;
若采集回来的数据为噪声数据,则利用相关滤波,对噪声进行剔除(随着地图的增大,在计算机中的数据关联的计算的复杂度会大大增加)
机器人在创建地图的过程中存在许多的误差(一般指的是在机器人运动的过程中由于惯性导航,里程计,电机的旋转角度等等在机器人运行时间较长的时候会有较大的累计误差),消除误差也是slam研究的一个重点方向
坐标系:一般包括三个坐标系:map(全局地图坐标系),base_link(机器人坐标系),base_laser(传感器坐标系),三个坐标系通过一个变换矩阵可以将不同坐标系下的坐标信息放到同一个坐标系下(在ROS操作系统中,提供了现成的库)
机器人 模型(两轮差分驱动)
传感器观测模型
gmapping是一个比较完善的地图构建开源包,使用激光和里程计的数据来生成二维地图。
一、gmapping应用条件
想使用gmapping包,当然要清楚它的输入输出是什么。
在ros中这些输入输出通常表现为订阅(subscribe)和发布(publish)哪些主题(topic)。
1.gmapping的订阅
gmapping订阅的其实非常简单,只有两种
1. tf (tf/tfMessage)
2. scan (sensor_msgs/LaserScan)
解释详见:ros官方解释,大家最好点到链接里面啊仔细看一下这些message的具体形式以便深入理解。
2.gmapping的发布
- map_metadata (nav_msgs/MapMetaData)
- map (nav_msgs/OccupancyGrid)
发布了地图的信息,比例,初始位置等
3.ros坐标系(tf转换)
很多同学发现,我已经让gmapping订阅了激光数据啊,里程计也开了,怎么地图并没有构建成功呢。
原因是ros里面有一个tf转换机制,需要用tf将各种数据的坐标系串联起来,变成一个树形结构(每个节点只能有一个父节点,可以有多个孩子节点),以便后面通讯和显示。
usually a fixed value, broadcast periodically by a robot_state_publisher, or a tf static_transform_publisher.
base_link → odom
usually provided by the odometry system (e.g., the driver for the mobile base)
上面是ros上的一个介绍
其实就是要将激光发布frame跟baselink和odom(里程计帧)连接起来
下面晒出我使用的tf转换代码
static tf::TransformBroadcaster laser_broadcaster;
tf::Transform laser_transform;
laser_transform.setOrigin( tf::Vector3(0.3, 0, 0.05) );
tf::Quaternion q;
q.setRPY(0, 0, 0);
laser_transform.setRotation(q);
laser_broadcaster.sendTransform(tf::StampedTransform(laser_transform, ros::Time::now(), "base_link", "laser"));\\以base_link为父节点,laser为子节点
二、gmapping源码分析
这一篇先讲我对gmapping源码的理解(难免有错,欢迎指正,相互学习)。
参考论文:
Improved Techniques for Grid Mapping with Rao-Blackwellized Particle Filters
参考博客:
http://blog.csdn.net/heyijia0327/article/details/40899819 pf原理讲解
http://blog.csdn.net/u010545732/article/details/17462941 pf代码实现
http://www.cnblogs.com/yhlx125/p/5634128.html gmapping分析
http://wenku.baidu.com/view/3a67461550e2524de4187e4d.html?from=search gmapping 分析
其他参考 :
http://ishare.iask.sina.com.cn/f/24615049.html
从ros官网上下载 slam_gmapping 包以及在openslam ( http://openslam.org/ )上下载openslam_gmapping包。
为了方便的阅读源码,这里强力推荐一款源码阅读软件 understand (聪明的你一定找的到资源),可以方便实现各种跳转与生成图、表、树,流程等。
废话不多说了,开始看源码,对于我这种c++都没有过关的菜鸟,看着大几千行的c++的代码,简直是身体和精神上的蹂躏。
先说说 slam_gmapping 包与openslam_gmapping包
进入slam_gmapping 的main.cpp文件的关系,slam_gmapping 是openslam_gampping在ros下的二次封装,你可以直接用这个包,而真正的核心代码实现都在openslam_gampping里面。
进入代码
先用understand 看看代码的调用关系。 (调用太复杂了,图太大,我就截取了一小部分)
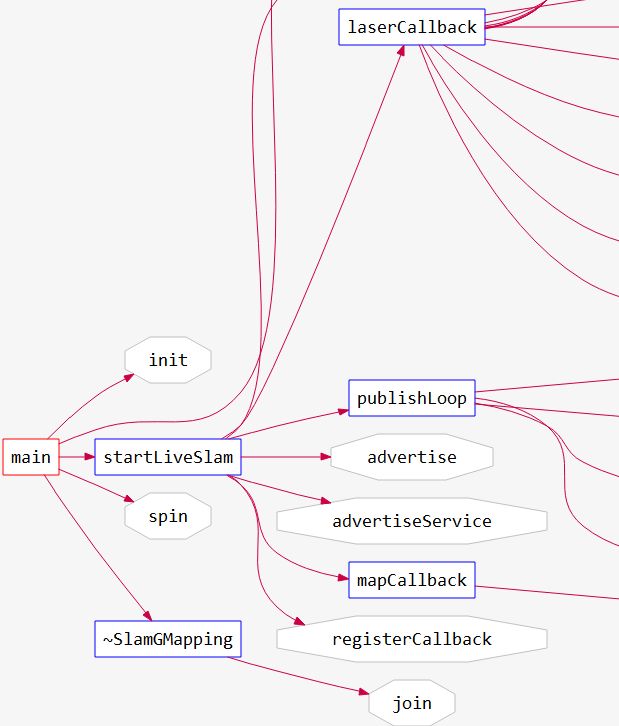
gn.startLiveSlam();
{
entropy_publisher_ = private_nh_.advertise("entropy", 1, true);
sst_ = node_.advertise("map", 1, true);
sstm_ = node_.advertise("map_metadata", 1, true);
ss_ = node_.advertiseService("dynamic_map", &SlamGMapping::mapCallback, this);
scan_filter_sub_ = new message_filters::Subscriber(node_, "scan", 5);
scan_filter_ = new tf::MessageFilter(*scan_filter_sub_, tf_, odom_frame_, 5);
scan_filter_->registerCallback(boost::bind(&SlamGMapping::laserCallback, this, _1));
transform_thread_ = new boost::thread(boost::bind(&SlamGMapping::publishLoop, this, transform_publish_period_));
}
也没写啥,主要就是一些消息的回调以及发布一些服务,重点在
void SlamGMapping::laserCallback(const sensor_msgs::LaserScan::ConstPtr& scan)
{
laser_count_++;
/*每隔throttle_scans_ (默认值 1)帧数据计算一次,限流作用*/
if ((laser_count_ % throttle_scans_) != 0)
return;
static ros::Time last_map_update(0,0);
/* We can't initialize the mapper until we've got the first scan */
if(!got_first_scan_)
{
/*一些重要参数的初始化,将slam里的参数传递到 openslam 里 ,设定坐标系,坐标原点,以及采样函数随机种子的初始化,等等
里面还调用了 GridSlamProcessor::init ,这个初始化了粒子数,子地图大小 */
if(!initMapper(*scan))
return;
got_first_scan_ = true;
}
GMapping::OrientedPoint odom_pose;
/**
pay attention: addScan这个函数*要转到pf的核心代码了 ,将调用processScan
*/
if(addScan(*scan, odom_pose))
{
ROS_DEBUG("scan processed");
GMapping::OrientedPoint mpose = gsp_->getParticles()[gsp_->getBestParticleIndex()].pose;
ROS_DEBUG("new best pose: %.3f %.3f %.3f", mpose.x, mpose.y, mpose.theta);
ROS_DEBUG("odom pose: %.3f %.3f %.3f", odom_pose.x, odom_pose.y, odom_pose.theta);
ROS_DEBUG("correction: %.3f %.3f %.3f", mpose.x - odom_pose.x, mpose.y - odom_pose.y, mpose.theta - odom_pose.theta);
tf::Transform laser_to_map = tf::Transform(tf::createQuaternionFromRPY(0, 0, mpose.theta), tf::Vector3(mpose.x, mpose.y, 0.0)).inverse();
tf::Transform odom_to_laser = tf::Transform(tf::createQuaternionFromRPY(0, 0, odom_pose.theta), tf::Vector3(odom_pose.x, odom_pose.y, 0.0));
map_to_odom_mutex_.lock();
map_to_odom_ = (odom_to_laser * laser_to_map).inverse();
map_to_odom_mutex_.unlock();
if(!got_map_ || (scan->header.stamp - last_map_update) > map_update_interval_)
{
updateMap(*scan); //更新地图
last_map_update = scan->header.stamp;
ROS_DEBUG("Updated the map");
}
} else
ROS_DEBUG("cannot process scan");
}
在 processScan 函数里依次执行了
运动模型
更新t时刻的粒子群,(模型中加入了高斯噪声)
你要问我是为啥是这样的公式,请自行参考《Probabilistic Robot 》一书的P107页 ,里程计运动模型
relPose 当前时刻的位姿(x,y,theta) ,m_odoPose 上一时刻的位姿
OrientedPoint
MotionModel::drawFromMotion(const OrientedPoint& p, const OrientedPoint& pnew, const OrientedPoint& pold) const{
double sxy=0.3*srr; //目测是两轮轴间耦合方差,有点诡异???
OrientedPoint delta=absoluteDifference(pnew, pold);
OrientedPoint noisypoint(delta); //噪声估计
noisypoint.x+=sampleGaussian(srr*fabs(delta.x)+str*fabs(delta.theta)+sxy*fabs(delta.y));
noisypoint.y+=sampleGaussian(srr*fabs(delta.y)+str*fabs(delta.theta)+sxy*fabs(delta.x));
noisypoint.theta+=sampleGaussian(stt*fabs(delta.theta)+srt*sqrt(delta.x*delta.x+delta.y*delta.y));
noisypoint.theta=fmod(noisypoint.theta, 2*M_PI);
if (noisypoint.theta>M_PI)
noisypoint.theta-=2*M_PI;
return absoluteSum(p,noisypoint); //叠加噪声
}
计算t-1 —> t 时刻的 位移增量,以及角位移增量
OrientedPoint move=relPose-m_odoPose;
move.theta=atan2(sin(move.theta), cos(move.theta));
m_linearDistance+=sqrt(move*move);
m_angularDistance+=fabs(move.theta);
if (! m_count ||m_linearDistance>=m_linearThresholdDistance
|| m_angularDistance>=m_angularThresholdDistance
|| (period_ >= 0.0 && (reading.getTime() - last_update_time_) > period_))
{
//...
}
if 里面有几个重要的函数,如下
扫描匹配
通过匹配选取最优的粒子,如果匹配失败,则返回一个默认的似然估计
原理就参考 《Probabilistic Robot》 一书的P143 页 , likelihood_field_range_finder_mode
inline void GridSlamProcessor::scanMatch(const double* plainReading){
/* sample a new pose from each scan in the reference */
double sumScore=0;
for (ParticleVector::iterator it=m_particles.begin(); it!=m_particles.end(); it++){
OrientedPoint corrected;
double score, l, s;
/* 计算最优的粒子
optimize 调用了 score 这个函数 (计算粒子得分)
在score 函数里,首先计算障碍物的坐标phit,然后将phit转换成网格坐标iPhit
计算光束上与障碍物相邻的非障碍物网格坐标pfree,pfrree由phit沿激光束方向移动一个网格的距离得到,将pfree转换成网格坐标ipfree(增量,并不是实际值)
在iphit 及其附近8个(m_kernelSize:default=1)栅格(pr,对应自由栅格为pf)搜索最优可能是障碍物的栅格。
最优准则: pr 大于某一阈值,pf小于该阈值,且pr栅格的phit的平均坐标与phit的距离bestMu最小。
得分计算: s +=exp(-1.0/m_gaussianSigma*bestMu*besMu) 参考NDT算法,距离越大,分数越小,分数的较大值集中在距离最小值处,符合正态分布模型
至此 score 函数结束并返回粒子(currentPose)得分,然后回到optimize函数
optimize 干的事就是 currentPose 的位姿进行微调,前、后、左、右、左转、右转 共6次,然后选取得分最高的位姿,返回最终的得分
*/
score=m_matcher.optimize(corrected, it->map, it->pose, plainReading);
if (score>m_minimumScore){ //判断得分是否符合要求
it->pose=corrected;
} else {
if (m_infoStream){
m_infoStream << "Scan Matching Failed, using odometry. Likelihood=" << l <map, it->pose, plainReading);
sumScore+=score;
it->weight+=l;
it->weightSum+=l;
/* 计算可活动区域
//set up the selective copy of the active area
//by detaching the areas that will be updated
computeActiveArea 用于计算每个粒子相应的位姿所扫描到的区域
计算过程首先考虑了每个粒子的扫描范围会不会超过子地图的大小,如果会,则resize地图的大小
然后定义了一个activeArea 用于设置可活动区域,调用了gridLine() 函数,这个函数如何实现的,
请参考百度文库那篇介绍。
*/
m_matcher.invalidateActiveArea();
m_matcher.computeActiveArea(it->map, it->pose, plainReading);
}
if (m_infoStream)
m_infoStream << "Average Scan Matching Score=" << sumScore/m_particles.size() << std::endl;
}
权重更新
重采样前更新过一次,重采样后又更新过一次,更新原理,参见论文(表示不是太懂)
void GridSlamProcessor::updateTreeWeights(bool weightsAlreadyNormalized){
if (!weightsAlreadyNormalized) {
normalize(); //Neff 计算 (论文中公式20)
}
resetTree(); //初始化粒子的树节点 权重,访问次数 ,父节点
propagateWeights(); //为了迭代计算,计算上一次的该粒子的权重 (论文中公式19)
}
重采样
粒子集对目标分布的近似越差,则权重的方差越大,可用Neff来度量,具体原理参见论文,以及白巧克力亦唯心的那篇博客
代码太长了就不粘贴了
重采样里还调用了registerScan ,这个函数和computeActive 函数有点像,不同的是,registerScan用于注册每个单元格
的状态,自由、障碍,调用update()以及entroy()函数更新,最后是障碍物的概率 p=n/visits ,
障碍物的坐标用平均值来算完了后,又有一次权重计算。
至此,processScan 结束,回到laserCallback,还有最优一步updateMap
resample(plainReading, adaptParticles, reading_copy);
地图更新
先得到最优的粒子(用权重和 weightSum判断 ),得到机器人最优轨迹
地图膨胀更新
void
SlamGMapping::updateMap(const sensor_msgs::LaserScan& scan)
{
ROS_DEBUG("Update map");
boost::mutex::scoped_lock map_lock (map_mutex_);
GMapping::ScanMatcher matcher;
matcher.setLaserParameters(scan.ranges.size(), &(laser_angles_[0]),
gsp_laser_->getPose());
matcher.setlaserMaxRange(maxRange_);
matcher.setusableRange(maxUrange_);
matcher.setgenerateMap(true);
/* 取最优粒子,根据权重和weightSum 判断(最大) */
GMapping::GridSlamProcessor::Particle best =
gsp_->getParticles()[gsp_->getBestParticleIndex()];
std_msgs::Float64 entropy;
entropy.data = computePoseEntropy();
if(entropy.data > 0.0)
entropy_publisher_.publish(entropy);
if(!got_map_) {
map_.map.info.resolution = delta_;
map_.map.info.origin.position.x = 0.0;
map_.map.info.origin.position.y = 0.0;
map_.map.info.origin.position.z = 0.0;
map_.map.info.origin.orientation.x = 0.0;
map_.map.info.origin.orientation.y = 0.0;
map_.map.info.origin.orientation.z = 0.0;
map_.map.info.origin.orientation.w = 1.0;
}
GMapping::Point center;
center.x=(xmin_ + xmax_) / 2.0;
center.y=(ymin_ + ymax_) / 2.0;
GMapping::ScanMatcherMap smap(center, xmin_, ymin_, xmax_, ymax_,
delta_);
ROS_DEBUG("Trajectory tree:");
/*得到机器人最优轨迹 */
for(GMapping::GridSlamProcessor::TNode* n = best.node;
n;
n = n->parent)
{
ROS_DEBUG(" %.3f %.3f %.3f",
n->pose.x,
n->pose.y,
n->pose.theta);
if(!n->reading)
{
ROS_DEBUG("Reading is NULL");
continue;
}
/*重新计算栅格单元的概率*/
matcher.invalidateActiveArea();
matcher.computeActiveArea(smap, n->pose, &((*n->reading)[0]));
matcher.registerScan(smap, n->pose, &((*n->reading)[0]));
}
/* the map may have expanded, so resize ros message as well */
if(map_.map.info.width != (unsigned int) smap.getMapSizeX() || map_.map.info.height != (unsigned int) smap.getMapSizeY()) {
/* NOTE: The results of ScanMatcherMap::getSize() are different from the parameters given to the constructor
so we must obtain the bounding box in a different way */
GMapping::Point wmin = smap.map2world(GMapping::IntPoint(0, 0));
GMapping::Point wmax = smap.map2world(GMapping::IntPoint(smap.getMapSizeX(), smap.getMapSizeY()));
xmin_ = wmin.x; ymin_ = wmin.y;
xmax_ = wmax.x; ymax_ = wmax.y;
ROS_DEBUG("map size is now %dx%d pixels (%f,%f)-(%f, %f)", smap.getMapSizeX(), smap.getMapSizeY(),
xmin_, ymin_, xmax_, ymax_);
map_.map.info.width = smap.getMapSizeX();
map_.map.info.height = smap.getMapSizeY();
map_.map.info.origin.position.x = xmin_;
map_.map.info.origin.position.y = ymin_;
map_.map.data.resize(map_.map.info.width * map_.map.info.height); //地图需要膨胀
ROS_DEBUG("map origin: (%f, %f)", map_.map.info.origin.position.x, map_.map.info.origin.position.y);
}
/*确定地图的未知区域、自由区域、障碍 */
for(int x=0; x < smap.getMapSizeX(); x++)
{
for(int y=0; y < smap.getMapSizeY(); y++)
{
/// @todo Sort out the unknown vs. free vs. obstacle thresholding
GMapping::IntPoint p(x, y);
double occ=smap.cell(p);
assert(occ <= 1.0);
if(occ < 0)
map_.map.data[MAP_IDX(map_.map.info.width, x, y)] = -1;
else if(occ > occ_thresh_)
{
//map_.map.data[MAP_IDX(map_.map.info.width, x, y)] = (int)round(occ*100.0);
map_.map.data[MAP_IDX(map_.map.info.width, x, y)] = 100;
}
else
map_.map.data[MAP_IDX(map_.map.info.width, x, y)] = 0;
}
}
got_map_ = true;
//make sure to set the header information on the map
map_.map.header.stamp = ros::Time::now();
map_.map.header.frame_id = tf_.resolve( map_frame_ );
sst_.publish(map_.map);
sstm_.publish(map_.map.info);
}
至此,整个gmapping 的主线已经挑出来了,当然里面还有很多初始化我没讲,而且有很多细节我也还没有弄清楚,
还有待进一步的研究(比如地图是如何膨胀的,扫描匹配得分计算的具体实施过程)。