Halcon--边缘提取-轮廓-确定钻孔洞的最小和最大半径
文章目录
- 前言
- 一、思路
- 二、测试图
- 三、源码
- 总结
前言
基于边缘提取-轮廓-确定钻孔洞的最小和最大半径
一、思路
在获得钻孔的亚像素轮廓之后,得到圆形钻孔圆心的行列坐标,循环遍历 依次对所有的轮廓进行最小和最大半径的计算,从而确定钻孔洞的最小和最大半径。
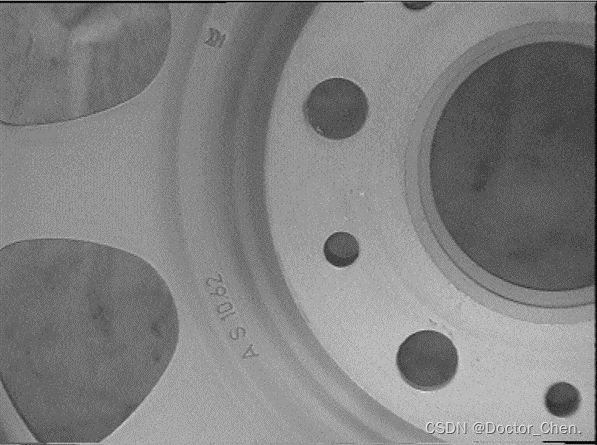
二、测试图
三、源码
* 读钻孔图像、获取图像的尺寸
read_image (Rim, 'rim')
get_image_size (Rim, Width, Height)
dev_open_window (0, 0, Width, Height, 'black', WindowID)
dev_display (Rim)
set_display_font (WindowID, 14, 'mono', 'false', 'false')
* 分割圆孔,选择的alpha参数与默认值不同,以确保更强的平滑度和更紧密的连接边缘组件。
* 使用canny算子提取亚像素轮廓
edges_sub_pix (Rim, Edges, 'canny', 4, 20, 40)
* 使用圆特征,使用特征直方图选择圆轮廓
select_shape_xld (Edges, Holes, 'circularity', 'and', 0.7, 1.0)
* 按照周围矩形的左上角点的坐标来排序
sort_contours_xld (Holes, Holes, 'upper_left', 'true', 'row')
* 确认中点
* 得到指定轮廓的最小圆形轮廓的半径和中心点行列坐标
smallest_circle_xld (Holes, Row, Column, Radius)
* 得到轮廓对象的个数
count_obj (Holes, Number)
dev_set_color ('yellow')
* 循环遍历 依次对所有的轮廓进行最小和最大半径的计算
for i := 1 to Number by 1
* 选择一个对象
select_obj (Holes, Hole, i)
dev_display (Rim)
dev_display (Hole)
* 通过计算孔的最小半径和最大半径、中点到轮廓的距离
distance_pc (Hole, Row[i - 1], Column[i - 1], DistanceMin, DistanceMax)
* 并可视化结果(最小和最大半径)、在中心点处显示一个十字叉
disp_cross (WindowID, Row[i - 1], Column[i - 1], 6, 0)
* 浮点数格式化为字符串
tuple_string (DistanceMin, '.3f', SVal)
* 获取字符串的空间大小参数(基线之上的最高高度、低于基线的最大延伸、文本宽、文本高)
get_string_extents (WindowID, 'min: ' + SVal, Ascent, Descent, Width1, Height1)
* 在指定位置显示最小距离
disp_message (WindowID, 'min: ' + SVal, 'image', Row[i - 1] - 2 * Ascent, Column[i - 1] - Radius[i - 1] - Width1 - 10, 'black', 'true')
* 在指定位置显示最大距离
disp_message (WindowID, 'max: ' + DistanceMax$'.3f', 'image', Row[i - 1], Column[i - 1] - Radius[i - 1] - Width1 - 10, 'black', 'true')
disp_continue_message (WindowID, 'black', 'true')
stop ()
endfor
dev_close_window ()
总结
前天遇到了小兔子,昨天是小鹿,今天我遇见了你。