通信原理-数字基带传输
文章目录
-
- 数字基带传输系统模型
- 数字基带PAM信号波形及其功率谱密度
-
- 常用的数字PAM
-
- 二进制数字PAM信号
- 多电平的PAM信号(MPAM信号)
- 数字PAM信号的功率谱密度
-
- 各符号互不相关时的数字PAM信号的功率谱密度
- 线路码型
-
- AMI码
- 脉冲波形
- AWGN信道下的2PAM数字基带系统的抗噪声性能
-
- (单)双极性2PAM数字基带系统的误比特率分析
- 利用匹配滤波器进行最佳接收的误比特率
- 限带信道中数字PAM信号的无码间干扰基带传输
- 理想带限AWGN信道条件下的数字PAM信号的最佳基带传输
-
- 无码间干扰的设计
- 最小错误概率设计
- 整合
- 信道均衡
- 眼图
- 部分响应系统
Author:CofCai
Email✉️:[email protected]
QQ:1664866311
personal page
CSDN page
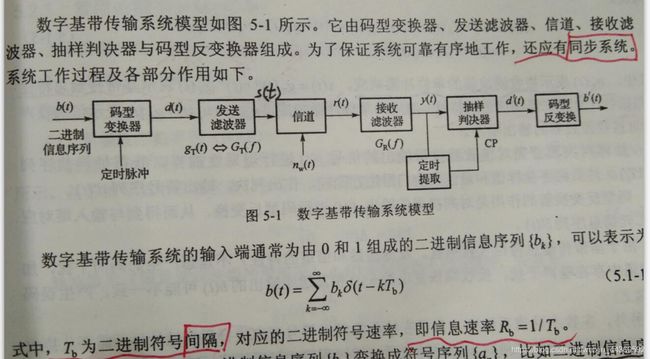
将数字基带信号通过基带信道进行传输,则称此传输系统为数字基带传输系统,需要考虑的有:
- 数字信号的功率谱特性是否和匹配信道的传输特性;
- 是否便于接收端提取符号同步信号
- 在规定的传输速率下,如何在抽样判决时刻使码间干扰和信道噪声对系统性能影响最小。
数字基带传输系统模型
型
变
换
器
送
滤
波
器
(噪声+
信道
本身
的特
性)
收
滤
波
器
样
判
决
器
型
反
变
换
整个过程如下所示:注意 d ( t ) d(t) d(t)是符号序列,而 s ( t ) s(t) s(t)是经过发送滤波器后的信号波形,其实两者是一回事,只不过是表现的形式不一样罢了。比如,我现在要传输符号2,那么可以通过电压传输(比如就用2v表示符号2)、动作(用两个手指拇表示符号2,或眨两下眼睛表示符号2)等,这其实就是发送滤波器的作用。
详细框图:
-
b ( t ) b(t) b(t)就是(二进制)数字信号,即:
b ( t ) = ∑ k = − ∞ ∞ b k δ ( t − k T b ) b(t) = \sum_{k=-\infin}^{\infin}{\color{blue}b_k}\delta(t-kT_b) b(t)=k=−∞∑∞bkδ(t−kTb)
式中, T b T_b Tb称为二进制符号间隔,对应二进制符号速率,即信息速率 R b = 1 / T b R_b=1/T_b Rb=1/Tb。 -
码型变换器的作用是:
将(二进制)数字信号 b k {b_k} bk变换成符号序列 a n {a_n} an,比如二进制信息序列变换为多进制符号序列,如 001 → 1 , 100 → 7 001{\to}1,100{\to}7 001→1,100→7;
d ( t ) = ∑ n = − ∞ ∞ a n δ ( t − n T s ) d(t) = \sum_{n=-\infin}^{\infin}{\color{blue}a_n}\delta(t-nT_s) d(t)=n=−∞∑∞anδ(t−nTs)
式中, T s T_s Ts称为符号间隔,对应符号速率,即 R s = 1 / T s R_s=1/T_s Rs=1/Ts。其中 T s = M T b T_s=MT_b Ts=MTb, M M M表示一个符号由 M M M个二进制组成,比如 B C D BCD BCD码就用4个二进制表示一个十进制。 -
发送滤波器(脉冲形成滤波器、数字脉冲调制器)的作用是:
将符号序列映射为适合信道传输的信号波形,如何映射呢?可以用数字序列 a n {a_n} an去控制脉冲载波的幅度(PAM)、位置(PPM)和宽度(PDM)。设发送滤波器的单位冲激响应为 g T ( t ) g_T(t) gT(t),则发送滤波器的数字PAM信号输出为:
s ( t ) = d ( t ) ∗ g T ( t ) = ∑ n = − ∞ ∞ a n g T ( t − n T s ) s(t) = d(t)^*g_T(t) = \sum_{n=-\infin}^{\infin}{\color{blue}a_n}g_T(t-nT_s) s(t)=d(t)∗gT(t)=n=−∞∑∞angT(t−nTs)
由于信道中存在噪声 n w ( t ) n_w(t) nw(t)或信道本身传输特性不理想 c ( t ) c(t) c(t),使得信号通过信道后发生变化,使得接收端接收到的信号和发送的信号不一致,即:
r ( t ) = s ( t ) ∗ c ( t ) + n w ( t ) = d ( t ) ∗ g T ( t ) ∗ c ( t ) + n w ( t ) r(t) = s(t)^*c(t) + n_w(t) \\ = d(t)^*g_T(t)^*c(t) + n_w(t) r(t)=s(t)∗c(t)+nw(t)=d(t)∗gT(t)∗c(t)+nw(t)
式中 c ( t ) c(t) c(t)表示信道的单位冲激响应, n w ( t ) n_w(t) nw(t)表示加性高斯白噪声。 -
接收滤波器的作用:
滤除带外噪声并对接收的波形进行均衡,以便抽样判决器正确判决,即:
y ( t ) = r ( t ) ∗ g R ( t ) = d ( t ) ∗ g T ( t ) ∗ c ( t ) ∗ g R ( t ) + n w ( t ) ∗ g R ( t ) = d ( t ) ∗ x ( t ) + n o ( t ) y(t) = r(t)^*g_R(t) \\ =d(t)^*{\color{blue}g_T(t)^*c(t)^*g_R(t)} + {\color{red}n_w(t)^*g_R(t)} \\ = d(t)^*{\color{blue}x(t)} + {\color{red}n_o(t)} y(t)=r(t)∗gR(t)=d(t)∗gT(t)∗c(t)∗gR(t)+nw(t)∗gR(t)=d(t)∗x(t)+no(t)
其中 x ( t ) = g T ( t ) ∗ c ( t ) ∗ g R ( t ) x(t)=g_T(t)^*c(t)^*g_R(t) x(t)=gT(t)∗c(t)∗gR(t)表示基带传输总特性(包括收、发滤波器和信道的特性)。回忆一下窄带高斯白噪声的统计特性(同相分量 n c ( t ) n_c(t) nc(t)和正交分量 n s ( t ) n_s(t) ns(t)都是平稳高斯随机过程,都是均值为0,方差(平均功率)等于窄带高斯白噪声的方差,具有相同的自相关函数和功率谱函数)。 -
抽样判决器的作用是:
对接收滤波器的输出 y ( t ) y(t) y(t)进行周期性判决,获得抽样值序列 y ( k T s ) y(kT_s) y(kTs),然后将抽样值和最佳判决门限进行对比,做出判决,输出符号序列 d ′ ( t ) d'(t) d′(t)。
-
码型反变换器的作用是:
将符号序列 d ′ ( t ) d'(t) d′(t)变换回二进制信息序列 b ′ ( t ) b'(t) b′(t)。
数字基带PAM信号波形及其功率谱密度
数字PAM信号 s ( t ) s(t) s(t)是以脉冲载波的幅度 a n a_n an来携带数字信息的。
s ( t ) = ∑ n = − ∞ ∞ a n g T ( t − n T s ) s(t) = \sum_{n=-\infin}^{\infin}{\color{blue}a_n}g_T(t-nT_s) s(t)=n=−∞∑∞angT(t−nTs)
常用的数字PAM
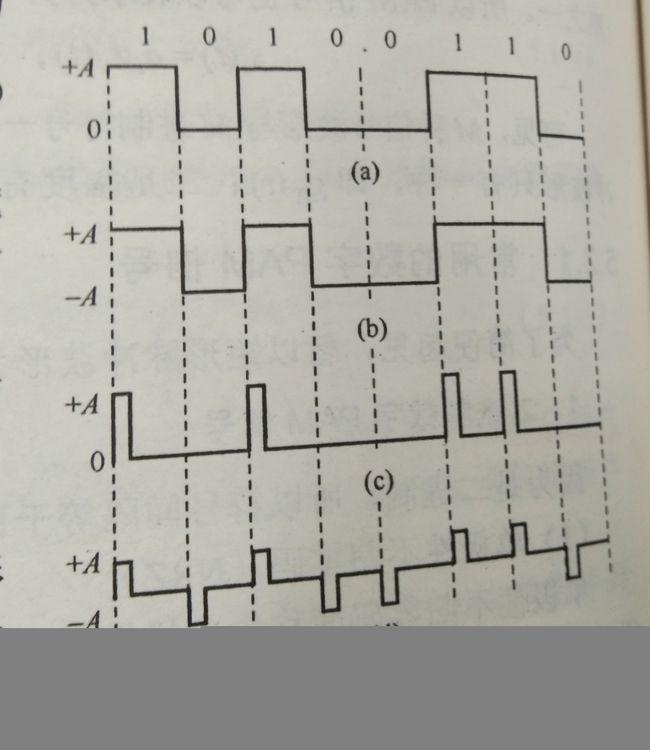
二进制数字PAM信号
因为是二进制,所以 T s = T b T_s=T_b Ts=Tb,符号序号n就是比特序号k。
下图从上到下依次是:单极性不归零码(NRZ)、双极性不归零码、单极性归零码(RZ)、双极性归零码,另外还有差分码 a k = a k − 1 异 或 b k a_k=a_{k-1}异或b_k ak=ak−1异或bk, b k b_k bk称为绝对码、 a k a_k ak称为相对码。
多电平的PAM信号(MPAM信号)
每K个二进制符号映射为MPAM中的M个可能的离散幅度之一。
a n = { + 3 A b 2 n − 1 b 2 n = 10 + A b 2 n − 1 b 2 n = 11 − A b 2 n − 1 b 2 n = 01 − 3 A b 2 n − 1 b 2 n = 00 a_n = \begin{cases} +3A && b_{2n-1}b_{2n}=10 \\ +A && b_{2n-1}b_{2n}=11 \\ -A && b_{2n-1}b_{2n}=01 \\ -3A && b_{2n-1}b_{2n}=00 \\ \end{cases} an=⎩⎪⎪⎪⎨⎪⎪⎪⎧+3A+A−A−3Ab2n−1b2n=10b2n−1b2n=11b2n−1b2n=01b2n−1b2n=00
数字PAM信号的功率谱密度
首先要明白,在前面的数字基带传输系统中谁是数字PAM信号,是 s ( t ) s(t) s(t)。
s ( t ) = ∑ n = − ∞ ∞ a n g T ( t − n T s ) s(t) = \sum_{n=-\infin}^{\infin}{\color{blue}a_n}g_T(t-nT_s) s(t)=n=−∞∑∞angT(t−nTs)
我们知道了 s ( t ) s(t) s(t)的表达式,要求它的功率谱密度,该怎么求呢?
-
根据定义求,对任意的确定功率信号 x ( t ) ↔ X T ( f ) x(t){\leftrightarrow}X_T(f) x(t)↔XT(f),其功率谱密度为:
P X ( f ) = lim T → ∞ ∣ X T ( f ) ∣ 2 T P_X(f) = \lim_{T{\to}\infin}\frac{|X_T(f)|^2}{T} PX(f)=T→∞limT∣XT(f)∣2
对于平稳随机过程的任一实现是一个确定的功率型信号,随机过程的功率谱密度应看作每一可能实现的功率谱的统计平均,即平稳随机过程的功率谱密度为:
P X ( f ) = lim T → ∞ E [ ∣ X T ( f ) ∣ 2 ] T P_X(f) = \lim_{T{\to}\infin}\frac{E\Big[\big|X_T(f)\big|^2\Big]}{T} PX(f)=T→∞limTE[∣∣XT(f)∣∣2] -
根据一些性质来求,我们又知道平稳随机过程的自相关函数和功率谱密度是一对傅里叶变换,表示为:
{ P X ( f ) = ∫ − ∞ + ∞ R X ( τ ) e − j 2 π f τ d τ R X ( τ ) = ∫ − ∞ + ∞ P X ( f ) e j 2 π f τ d f \begin{cases} P_X(f) = \int_{-\infin}^{+\infin}R_X(\tau)e^{-j2{\pi}f\tau}d_{\tau} \\ \\ R_X(\tau) = \int_{-\infin}^{+\infin}P_X(f)e^{j2{\pi}f\tau}d_f \end{cases} ⎩⎪⎨⎪⎧PX(f)=∫−∞+∞RX(τ)e−j2πfτdτRX(τ)=∫−∞+∞PX(f)ej2πfτdf
因为 s ( t ) s(t) s(t)中, g T ( t ) g_T(t) gT(t)是脉冲波形,它是一个确定的能量信号;M进制幅度序列 a n {a_n} an是实的广义平稳随机序列,其均值 m a = E [ a n ] m_a=E[a_n] ma=E[an],自相关函数 R a ( m ) = E [ a n a n + m ] R_a(m)=E[a_na_{n+m}] Ra(m)=E[anan+m]。
因为数字PAM信号 s ( t ) s(t) s(t)是一个循环平稳随机过程(均值和自相关函数在时间上都是周期函数),所以对它的自相关函数 R s ( t , t + τ ) R_s(t,t+\tau) Rs(t,t+τ)在一个周期内求时间平均 R s ( t , t + τ ) R_s(t,t+\tau) Rs(t,t+τ),再对 R S ( t , t + τ ) R_S(t,t+\tau) RS(t,t+τ)进行傅里叶变换,即可得到数字PAM信号的功率谱密度。
所以数字PAM信号的功率谱密度为(省略推导):
s ( t ) = ∑ n = − ∞ ∞ a n g T ( t − n T s ) P s ( f ) = 1 T s P a ( f ) ∣ G T ( f ) ∣ 2 s(t) = \sum_{n=-\infin}^{\infin}{\color{blue}a_n}g_T(t-nT_s) \\ P_s(f) = \frac{1}{T_s}{\color{blue}P_a(f)}\Big|G_T(f)\Big|^2 s(t)=n=−∞∑∞angT(t−nTs)Ps(f)=Ts1Pa(f)∣∣∣GT(f)∣∣∣2
其中 P a ( f ) P_a(f) Pa(f)是随机序列(符号序列) a n {a_n} an的功率谱密度,表示为:
P a ( f ) = ∑ n = − ∞ ∞ R a ( m ) e − j 2 π f m T s P_a(f) = \sum_{n=-\infin}^{\infin}R_a(m)e^{-j2{\pi}fmT_s} Pa(f)=n=−∞∑∞Ra(m)e−j2πfmTs
注意, R a ( m ) R_a(m) Ra(m)是数字PAM信号 s ( t ) s(t) s(t)的幅度 a n a_n an的自相关函数,由于 a n a_n an是在时域离散的,所以作傅里叶变换求功率谱密度时是求和,而不是积分,即不是:
P a ( f ) = ∫ − ∞ + ∞ R a ( m ) e − j 2 π f t d t P_a(f) = \int_{-\infin}^{+\infin}R_a(m)e^{-j2{\pi}ft}d_t Pa(f)=∫−∞+∞Ra(m)e−j2πftdt
∣ G T ( f ) ∣ 2 \Big|G_T(f)\Big|^2 ∣∣∣GT(f)∣∣∣2是 g T ( t ) g_T(t) gT(t)的能量谱密度(因为是能量信号,功率谱为0,即没有功率谱密度),它是能量信号 g T ( T ) g_T(T) gT(T)的自相关函数 R g ( τ ) R_g(\tau) Rg(τ)的傅里叶变换,表示为:
∣ G T ( f ) ∣ 2 = ∫ − ∞ + ∞ R g ( τ − m T s ) e − j 2 π f ( τ − m T s ) d τ \Big|G_T(f)\Big|^2 = \int_{-\infin}^{+\infin}R_g(\tau-mT_s)e^{-j2{\pi}f(\tau-mT_s)}d_{\tau} ∣∣∣GT(f)∣∣∣2=∫−∞+∞Rg(τ−mTs)e−j2πf(τ−mTs)dτ
各符号互不相关时的数字PAM信号的功率谱密度
如果随机序列 a n {a_n} an是广义平稳随机序列,且符号之间互不相关,则:
c o v ( a n a n + m ) = E { [ a n − E ( a n ) ] [ a n + m − E ( a n + m ) ] } = { δ a 2 m = 0 0 m ≠ 0 cov(a_na_{n+m}) = E\{[a_n-E(a_n)][a_{n+m}-E(a_{n+m})]\} = \\ \begin{cases} \delta_a^2 & m=0 \\ 0 & m{\ne}0 \end{cases} cov(anan+m)=E{[an−E(an)][an+m−E(an+m)]}={δa20m=0m=0
即:
R a ( m ) = E [ a n a n + m ] = { δ a 2 + m a 2 m = 0 m a 2 m ≠ 0 R_a(m) = E\Big[a_na_{n+m}\Big] = \\ \begin{cases} \delta_a^2+m_a^2 & m=0 \\ m_a^2 & m{\ne}0 \end{cases} Ra(m)=E[anan+m]={δa2+ma2ma2m=0m=0
m a m_a ma表示广义平稳随机序列 a n {a_n} an的均值, δ a 2 \delta_a^2 δa2表示方差。
此时( a n a_n an互不相关),数字PAM信号的功率谱密度为:
P s ( f ) = δ a 2 T s ∣ G T ( f ) ∣ 2 + m a 2 T s 2 ∑ m = − ∞ ∞ ∣ G T ( m T s ) ∣ 2 δ ( f − m T s ) P_s(f) = {\color{red}\frac{\delta_a^2}{T_s}\Big|G_T(f)\Big|^2} + {\color{blue}\frac{m_a^2}{T_s^2}\sum_{m=-\infin}^{\infin}\Big|G_T\big(\frac{m}{T_s}\big)\Big|^2\delta(f-\frac{m}{T_s})} Ps(f)=Tsδa2∣∣∣GT(f)∣∣∣2+Ts2ma2m=−∞∑∞∣∣∣GT(Tsm)∣∣∣2δ(f−Tsm)
- 红色部分是连续谱,它的形状取决于 ∣ G T ( f ) ∣ 2 \Big|G_T(f)\Big|^2 ∣∣∣GT(f)∣∣∣2,这一项总是存在的。对于连续谱,主要关心它的功率集中在哪一个频率范围,并由此确定信号的带宽。
- 蓝色是离散谱(离散求和),这一项不一定存在。离散谱中相邻线谱的频率间隔为 1 / T s 1/T_s 1/Ts,频率为 f = m / T s f=m/T_s f=m/Ts的离散谱的功率与 ∣ G T ( m T s ) ∣ 2 \Big|G_T\big(\frac{m}{T_s}\big)\Big|^2 ∣∣∣GT(Tsm)∣∣∣2成正比。
- 如果含有频率为 f s = 1 / T s f_s=1/T_s fs=1/Ts的离散谱,那么在接收端通过一个窄带滤波器滤出改信号分量,再通过一个移相器调整相位后,可得到与发来的数字信号的符号速率同步的定时脉冲,这样就可以在接收端以符号速率进行周期性抽样、判决, f s = 1 / T s f_s=1/T_s fs=1/Ts的离散谱称为时钟分量或定时分量。
如果随机序列 a n {a_n} an是实的广义平稳随机序列,且符号之间不相关、均值为零,则数字MPAM信号的功率谱密度为:
P s ( f ) = δ a 2 T s ∣ G T ( f ) ∣ 2 P_s(f) = {\color{red}\frac{\delta_a^2}{T_s}\Big|G_T(f)\Big|^2} Ps(f)=Tsδa2∣∣∣GT(f)∣∣∣2
有了上面的推论,我们就可以得到以下几种码的功率谱密度:

上表中归零码的 g T ( t ) g_T(t) gT(t)和不归零码的 g T ( t ) g_T(t) gT(t)的区别就是矩形脉冲的宽度一个是 T s T_s Ts,另一个的是 τ \tau τ, τ < T s \tau
综上所述,有以下结论:
-
如果发送滤波器的冲激响应 g T ( t ) g_T(t) gT(t)是矩阵脉冲,幅度序列 a n {a_n} an中各符号之间互不相关,则不管是双极性还是单极性、二元码还是多元码、归零码还是不归零码,其连续谱的第一零点带宽均为:
B = 1 / τ B = 1/\tau B=1/τ
当为不归零码时, τ = T s \tau=T_s τ=Ts, τ \tau τ表示矩形脉冲的脉冲宽度。对于相同的 R b R_b Rb,如果采用MPAM信号波形,相对于2PAM信号波形,功率谱密度形状不变,但主瓣宽度缩减为原来的 1 / log 2 M 1/\log_2^M 1/log2M。用特殊情况来说明,假设某8PAM和某2PAM,其均值都为0,因此其功率谱密度只跟方差有关(看前面的公式),所以它们俩形状是一样的;另外:
{ T s 1 = 3 T b , 8 P A M T s 2 = T b , 2 P A M { B 1 = 1 / T s 1 = 1 / 3 T b , 8 P A M B 2 = 1 / T s 2 = 1 / T b , 2 P A M \begin{cases} T_{s1} = 3T_b, & 8PAM\\ T_{s2} = T_b, & 2PAM\\ \end{cases} \\ \begin{cases} B_1 = 1/T_{s1} = 1/3T_b, & 8PAM\\ B_2 = 1/T_{s2} = 1/T_b, & 2PAM \end{cases} {Ts1=3Tb,Ts2=Tb,8PAM2PAM{B1=1/Ts1=1/3Tb,B2=1/Ts2=1/Tb,8PAM2PAM
因此,主瓣宽度缩减了 1 / log 2 8 = 1 / 3 1/\log_2^8=1/3 1/log28=1/3倍。 -
利用离散谱(可能没有),可以从脉冲序列中提取时钟分量或其它有用的信号分量。
线路码型
用于频谱成形的幅度序列的编码称为线路码型或传输码,注意几点:
- 用于频谱成形:说明我们事先知道一些比较好的频谱(和信道匹配,或者通用频谱),然后想办法找出如何编码能达到这样的效果。
- 线路码型就是幅度序列的编码,只不过不是随意编码的,而是根据频谱需求来进行编码的。相当于:我们有一个目标函数(频谱图),自变量是幅度序列,然后找到一个映射关系(编码)能将自变量(幅度序列)较好的拟合出目标函数(频谱图)。
- 上面两点都是在说一个意思,哈哈。
AMI码
即传号交替反转码,二进制序列的0称为空号,1称为传号;按如下规则进行编码:空号变为0,传号交替变为+1、-1。
还有HDB3码、数字双相码、CMI码
脉冲波形
前面介绍的各种常用码型都是以矩形脉冲为基础的,但是矩形脉冲的上升和下降都是突变的,其低频分量和高频成分比较丰富,占用频带也比较宽。如果信道带宽有限,采用以矩形脉冲为基础的码型就不利于信道传输,而需要采用带宽有限的波形,比如常见的根号升余弦谱的脉冲信号。
AWGN信道下的2PAM数字基带系统的抗噪声性能
- 首先,那里会出现噪声?当然是在信道中传输的时候会混入加性高斯白噪声。
- 出错的情况有多少种呢?假设是MAPM,那么就应该有 A M M − 1 A_M^{M-1} AMM−1种会出现错误的情况,比如当M=2时,那么就是信源发1,接收端收到0;信源发0,接收端收到1;当M=3时,那就是信源发1,接收端可能收到2或3,同理当信源发2时,接收端可能收到1或3,等等。
现在只讨论最简单的2PAM出错的情况,作以下规定:
s i ( t ) = { s 1 ( t ) b k = 1 s 2 ( t ) b k = 0 s_i(t) = \begin{cases} s_1(t) && b_k = 1 \\ s_2(t) && b_k = 0 \end{cases} si(t)={s1(t)s2(t)bk=1bk=0
那么出错的情况就是 b k = 1 b_k=1 bk=1时(发送 s 1 ( t ) s1(t) s1(t)),接收到 s 2 ( t ) s2(t) s2(t),记为 P ( e ∣ s 1 ) P(e|s_1) P(e∣s1); b k = 0 b_k=0 bk=0时(发送 s 2 ( t ) s2(t) s2(t)),接收到 s 1 ( t ) s1(t) s1(t)。二进制数字基带系统总的误符号率(即误比特率)就是:
P b = P ( s 1 ) P ( e ∣ s 1 ) + P ( s 2 ) P ( e ∣ s 2 ) P_b = P(s_1)P(e|s_1) + P(s_2)P(e|s_2) Pb=P(s1)P(e∣s1)+P(s2)P(e∣s2)
(单)双极性2PAM数字基带系统的误比特率分析
信源发送的是 s i ( t ) s_i(t) si(t),经过信道后,信宿接收到的是 r ( t ) = s i ( t ) + n w ( t ) r(t)=s_i(t)+n_w(t) r(t)=si(t)+nw(t),再经过接受滤波器后变为 y ( t ) = s o ( t ) + n o ( t ) y(t)=s_o(t)+n_o(t) y(t)=so(t)+no(t)(此时 n o ( t ) n_o(t) no(t)为带限高斯噪声)。在抽样时刻 k T b kTb kTb,设抽样信号为:
s o ( k T b ) = { a , s 1 ( t ) − a , s 2 ( t ) s_o(kT_b) = \begin{cases} a, && s_1(t) \\ -a, && s_2(t) \end{cases} so(kTb)={a,−a,s1(t)s2(t)
又抽样时刻噪声为 n o ( k T b ) n_o(kT_b) no(kTb),所以抽样时刻的取值为:
y ( k T b ) = { a + n o ( k T b ) , s 1 ( t ) − a + n o ( k T b ) , s 2 ( t ) y(kT_b) = \begin{cases} a + n_o(kT_b), && s_1(t) \\ -a + n_o(kT_b), && s_2(t) \end{cases} y(kTb)={a+no(kTb),−a+no(kTb),s1(t)s2(t)
现在得到了抽样时刻的值,接下来就需要根据要求进行判决,假设判决门限为 V d V_d Vd,即抽样值大于判决门限,就视为 s 1 ( t ) s_1(t) s1(t),否则为 s 2 ( t ) s_2(t) s2(t)。
当发送 s 1 ( t ) s_1(t) s1(t)时,抽样值为 y ( t ) = a + n o ( t ) y(t)=a+n_o(t) y(t)=a+no(t),此时 y ( t ) y(t) y(t)的均值为a,方差为 δ n 2 \delta_n^2 δn2(因为 n o ( t ) n_o(t) no(t)的均值为0,方差为 δ n 2 \delta_n^2 δn2)。所以此时 y ( t ) y(t) y(t)的概率密度为高斯分布,表达式为:
p 1 ( y ) = p ( y ∣ s 1 ) = 1 2 π δ n e x p [ − ( y − a ) 2 2 δ n 2 ] p_1(y) = p(y|s_1) = \frac{1}{\sqrt{2\pi}\delta_n}exp\Big[-\frac{(y-a)^2}{2\delta_n^2}\Big] p1(y)=p(y∣s1)=2πδn1exp[−2δn2(y−a)2]
此时,判决出错的概率为:
P ( e ∣ s 1 ) = P ( y < V d ) = ⋯ = P [ n < − ( a − V d ) ] = Q ( a − V d δ n ) = 1 2 e r f c ( a − V d 2 δ n ) P(e|s_1) = P(y
同理,当发送 s 2 ( t ) s_2(t) s2(t)时,此时的抽样值和 s 1 ( t ) s_1(t) s1(t)时只是均值不同(均值为-a),其它都相同。此时判决出错的概率为:
P ( e ∣ s 2 ) = P ( y > V d ) = ⋯ = P [ n > ( a + V d ) ] = Q ( a + V d δ n ) = 1 2 e r f c ( a + V d 2 δ n ) P(e|s_2) = P(y>V_d) = \cdots \\ = P\Big[n>(a+V_d)\Big] \\ = Q(\frac{a+V_d}{\delta_n}) \\ = \frac{1}{2}erfc(\frac{a+V_d}{\sqrt{2}\delta_n}) P(e∣s2)=P(y>Vd)=⋯=P[n>(a+Vd)]=Q(δna+Vd)=21erfc(2δna+Vd)
传输系统总的误比特率如下:
P b = P ( s 1 ) P ( e ∣ s 1 ) + P ( s 2 ) P ( e ∣ s 2 ) = P ( s 1 ) Q ( a − V d δ n ) + P ( s 2 ) Q ( a + V d δ n ) P_b = P(s_1)P(e|s_1) + P(s_2)P(e|s_2) \\ = P(s_1)Q(\frac{a-V_d}{\delta_n}) + P(s_2)Q(\frac{a+V_d}{\delta_n}) Pb=P(s1)P(e∣s1)+P(s2)P(e∣s2)=P(s1)Q(δna−Vd)+P(s2)Q(δna+Vd)
既然我们知道了总的误比特率的表达式,那么把判决门限 V d V_d Vd看作未知数,求个导不就可以找出最佳的判决门限吗?一通推导计算,得到双极性2PAM的最佳判决门限是:
V d ∗ = δ n 2 2 a ln P ( s 2 ) P ( s 1 ) V_d^* = \frac{\delta_n^2}{2a}\ln{\frac{P(s_2)}{P(s_1)}} Vd∗=2aδn2lnP(s1)P(s2)
当 P ( s 2 ) = P ( s 1 ) P(s_2)=P(s_1) P(s2)=P(s1)时,最佳判决门限 V d ∗ = 0 V_d^*=0 Vd∗=0,这很符合常理嘛,此时(双极性2PAM)总误比特率为:
P b = Q ( a 2 δ n 2 ) P_b=Q\Big(\sqrt{\frac{a^2}{\delta_n^2}}\Big) Pb=Q(δn2a2)
同理,可以分析单极性2PAM的误比特率,其最佳判决门限为:
V d ∗ = a 2 + δ n 2 a ln P ( s 2 ) P ( s 1 ) V_d^* =\frac{a}{2} + \frac{\delta_n^2}{a}\ln{\frac{P(s_2)}{P(s_1)}} Vd∗=2a+aδn2lnP(s1)P(s2)
当 P ( s 2 ) = P ( s 1 ) P(s_2)=P(s_1) P(s2)=P(s1)时,最佳判决门限 V d ∗ = a / 2 V_d^*=a/2 Vd∗=a/2,此时(单极性2PAM)总误比特率为:
P b = Q ( a 2 4 δ n 2 ) P_b = Q\Big(\sqrt{\frac{a^2}{4\delta_n^2}}\Big) Pb=Q(4δn2a2)
附: Q ( a ) Q(a) Q(a)表示 P ( U > a ) P(U>a) P(U>a)的概率( U − N ( 0 , 1 ) U-N(0,1) U−N(0,1)),其等于 1 − Φ ( a ) 1-\Phi(a) 1−Φ(a)。因此,在相同a和相同噪声功率 δ n 2 \delta_n^2 δn2下,单极性的误比特率比双极性的误比特率更高(这也很直观嘛,双极性范围大,容错强)。
从上面的表达式可以知道,不管是双极性还是单极性,误比特率都跟信噪比 a 2 / δ n 2 a^2/\delta_n^2 a2/δn2有关。
利用匹配滤波器进行最佳接收的误比特率
无论是数字基带还是频带,都存在”最佳接收“。前面我们知道了误比特率跟信噪比有关,信噪比越大,误比特率越小,因此如果接收端的信噪比最大,那么就是最佳接收。而我们所学的匹配滤波器正是基于最大输出信噪比准则设计的最佳线性滤波器,匹配滤波器之所以叫匹配,就是因为它和输入信号是相似的,其单位冲激响应为 h ( t ) = K s 1 ( T b − t ) h(t)=Ks_1(T_b-t) h(t)=Ks1(Tb−t)( s 1 ( t ) , s 2 ( t ) s_1(t),s_2(t) s1(t),s2(t)只是极性不一样,所以匹配滤波器是一样的)。附:相关器(效果和匹配滤波器是一样的)。
根据匹配滤波器的结论,输出在抽样时刻的瞬时值为:
s o ( k T s ) = { K E , s 1 ( t ) − K E , s 2 ( t ) s_o(kT_s) = \begin{cases} KE, && s_1(t) \\ -KE, && s_2(t) \end{cases} so(kTs)={KE,−KE,s1(t)s2(t)
E E E是信号 s 1 ( t ) s_1(t) s1(t)的能量。又因为噪声服从高斯分布(双边功率谱为 N 0 / 2 N_0/2 N0/2),经过匹配滤波器后,输出在抽样时刻均值依旧为0,平均功率为 δ n 2 = K 2 N 0 E / 2 \delta_n^2=K^2N_0E/2 δn2=K2N0E/2,这样又可得到抽样时刻的概率密度,然后又经过分析计算可以得出两种出错情况的概率,当判决门限 V d ∗ = 0 , P ( s 1 ) = P ( s 2 ) V_d^*=0,P(s_1)=P(s_2) Vd∗=0,P(s1)=P(s2)时(最佳接收),双极性2PAM总的误比特率为:
P b = Q ( 2 E b N 0 ) P_b=Q\Big(\sqrt{\frac{2E_b}{N_0}}\Big) Pb=Q(N02Eb)
其实这和前面通过求导求得的结果是一样的,只需将 a = K E , δ n 2 = K 2 N 0 E / 2 , E = E b a=KE,\delta_n^2=K^2N_0E/2,E=E_b a=KE,δn2=K2N0E/2,E=Eb带入即可, E b E_b Eb表示接收信号的平均比特能量。
同理可以得出,当判决门限 V d ∗ = a / 2 , P ( s 1 ) = P ( s 2 ) V_d^*=a/2,P(s_1)=P(s_2) Vd∗=a/2,P(s1)=P(s2)时(最佳接收),单极性2PAM总的误比特率为:
P b = Q ( E b N 0 ) s o ( k T s ) = { K E 1 , s 1 ( t ) 0 , s 2 ( t ) P_b=Q\Big(\sqrt{\frac{E_b}{N_0}}\Big) \\ s_o(kT_s) = \begin{cases} KE_1, && s_1(t) \\ 0, && s_2(t) \end{cases} Pb=Q(N0Eb)so(kTs)={KE1,0,s1(t)s2(t)
E 1 E_1 E1表示信号 s 1 ( t ) s_1(t) s1(t)的能量, E b = E 1 / 2 E_b=E_1/2 Eb=E1/2。这和通过求导得到的结果也是一样的,只需将 a = K E 1 , δ n 2 = K 2 N 0 E 1 / 2 , E 1 / 2 = E b a=KE_1,\delta^2_n=K^2N_0E_1/2,E_1/2=E_b a=KE1,δn2=K2N0E1/2,E1/2=Eb带入即可。
实际上,单极性2PAM信号相当于幅度为 ± a / 2 {\pm}a/2 ±a/2的双极性2PAM信号叠加了一个直流 a / 2 a/2 a/2,这个直流使门限从0移到了 a / 2 a/2 a/2,因此两者的误比特率公式可以互用(就是一样的),双极性中的 a a a换成 a / 2 a/2 a/2就得到单极性的误比特率公式。
插入图:P157
限带信道中数字PAM信号的无码间干扰基带传输
数字基带传输特性是指由发送滤波器、信道、接收滤波器三者合一的传输特性,表示为:
X ( f ) = G T ( f ) C ( f ) G R ( f ) x ( t ) = g T ( t ) ∗ c ( t ) ∗ g R ( t ) X(f) = G_T(f)C(f)G_R(f) \\ x(t) = g_T(t)^*c(t)^*g_R(t) X(f)=GT(f)C(f)GR(f)x(t)=gT(t)∗c(t)∗gR(t)
不考虑信道噪声时,接受滤波器输出端的信号为:
y ( t ) = d ( t ) ∗ x ( t ) = ∑ n = − ∞ + ∞ a n x ( t − n T s ) y(t) = d(t)^*x(t) = \sum_{n=-\infin}^{+\infin}a_nx(t-nT_s) y(t)=d(t)∗x(t)=n=−∞∑+∞anx(t−nTs)
对 y ( t ) y(t) y(t)进行周期性抽样,抽样间隔为 T s T_s Ts,则第m个码元的抽样时刻为 t = m T s t=mT_s t=mTs,则瞬时抽样值为:
y ( m T s ) = ∑ n = − ∞ + ∞ a n x ( m T s − n T s ) = a m x ( 0 ) + ∑ n = − ∞ , n ≠ m + ∞ a n x ( m T s − n T s ) y(mT_s) = \sum_{n=-\infin}^{+\infin}a_nx(mT_s-nT_s) \\ ={\color{red}a_mx(0)} + {\color{blue}\sum_{n=-\infin,n{\ne}m}^{+\infin}a_nx(mT_s-nT_s)} y(mTs)=n=−∞∑+∞anx(mTs−nTs)=amx(0)+n=−∞,n=m∑+∞anx(mTs−nTs)
第一项 a m x ( 0 ) a_mx(0) amx(0)表示希望得到的接收符号 a m a_m am,而第二项表示除第m个码元外的其它码元的干扰的叠加。
因此,要消除码间干扰,就得让第二项为0,即:
a n x ( m T s − n T s ) = 0 , n ≠ m 即 要 求 x ( k T s ) = { 1 ( 或 常 数 ) , k = 0 ( n = m ) 0 , k ≠ 1 a_nx(mT_s-nT_s) = 0, {\qquad} {\color{blue}n{\ne}m} \\ 即要求{\quad} x(kT_s) = \begin{cases} 1({\color{red}或常数}), && {\color{blue}k=0\ (n=m)} \\ 0, && k{\ne}1 \end{cases} anx(mTs−nTs)=0,n=m即要求x(kTs)={1(或常数),0,k=0 (n=m)k=1
要使 x ( t ) x(t) x(t)满足上式的要求,则其傅里叶变换需满足:
∑ i = − ∞ + ∞ X ( f + i T s ) = T s ( 或 常 数 ) \sum_{i=-\infin}^{+\infin}X\Big(f+\frac{i}{T_s}\Big) = T_s({\color{red}或常数}) i=−∞∑+∞X(f+Tsi)=Ts(或常数)
T s T_s Ts表示抽样间隔,对应符号速率 R s = 1 / T s R_s=1/T_s Rs=1/Ts。
奈奎斯特准则表明:将系统的传输特性 X ( f ) X(f) X(f)按 1 / T s 1/T_s 1/Ts的频率间隔左右平移,并叠加得到 Z ( f ) Z(f) Z(f),只要 Z ( f ) Z(f) Z(f)为常数,则该系统可以以 R s = 1 / T s R_s=1/T_s Rs=1/Ts的符号速率实现无码间干扰。
说得更简单一点:在平移叠加之后为常数的前提下,系统的传输特性 X ( f ) X(f) X(f)能平移多少,该系统就能以多少的符号速率实现无码间干扰(符号间隔 T s T_s Ts就等于 1 / R s 1/R_s 1/Rs)。
通常将 X ( f ) X(f) X(f)在某一频率点呈互补对称的幅度特性称为”滚降特性“,如果滚降点频率为 B N B_N BN,则无码间干扰的最大符号速率为 2 B N 2B_N 2BN。
滚降系数:
α = B − B N B N \alpha = \frac{B-B_N}{B_N} α=BNB−BN
B B B是 X ( f ) X(f) X(f)的截止频率(不是3dB截止,是为0)。
最大频带利用率:
R s B = 2 1 + α \frac{R_s}{B} = \frac{2}{1+\alpha} BRs=1+α2
速度为 R s R_s Rs,滚降系数为 α \alpha α时,所需的最小带宽为:
B = ( 1 + α ) R s 2 B = (1+\alpha)\frac{R_s}{2} B=(1+α)2Rs
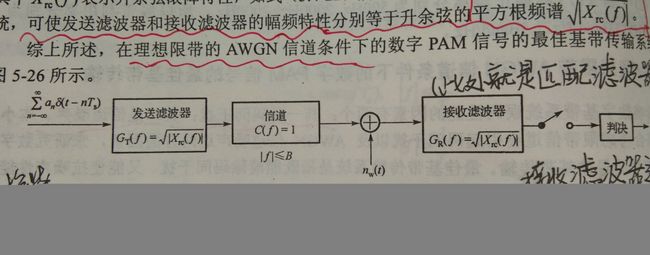
理想带限AWGN信道条件下的数字PAM信号的最佳基带传输
无码间干扰的设计
要求总的传输特性 X ( f ) X(f) X(f)为:
X ( f ) = G T ( f ) C ( f ) G R ( f ) = ∣ X r c ( f ) ∣ e − j 2 π f t d ∣ f ∣ < B X(f) = G_T(f)C(f)G_R(f) = \Big|X_{rc}(f)\Big|e^{-j2{\pi}ft_d}{\quad}|f|X(f)=GT(f)C(f)GR(f)=∣∣∣Xrc(f)∣∣∣e−j2πftd∣f∣<B
又因为是理想带限,所以:
C ( f ) = 1 ∣ f ∣ < B C(f) = 1 {\quad}|f|C(f)=1∣f∣<B
所以无码间干扰要求的传输特性就是:
X ( f ) = G T ( f ) G R ( f ) = ∣ X r c ( f ) ∣ e − j 2 π f t d ∣ f ∣ < B X(f) = G_T(f)G_R(f) = \Big|X_{rc}(f)\Big|e^{-j2{\pi}ft_d}{\quad}|f|X(f)=GT(f)GR(f)=∣∣∣Xrc(f)∣∣∣e−j2πftd∣f∣<B
最小错误概率设计
接收滤波器采用匹配滤波器(相关器也是可以的)是最佳接收,因此接收滤波器的传输特性为:
G R ( f ) = G T ∗ ( f ) e − j 2 π f t 0 G_R(f) = G_T^*(f)e^{-j2{\pi}ft_0} GR(f)=GT∗(f)e−j2πft0
整合
{ G T ( f ) G R ( f ) = ∣ X r c ( f ) ∣ e − j 2 π f t d G R ( f ) = G T ∗ ( f ) e − j 2 π f t 0 \begin{cases} G_T(f)G_R(f) = \Big|X_{rc}(f)\Big|e^{-j2{\pi}ft_d} \\ \\ G_R(f) = G_T^*(f)e^{-j2{\pi}ft_0} \end{cases} ⎩⎪⎪⎨⎪⎪⎧GT(f)GR(f)=∣∣∣Xrc(f)∣∣∣e−j2πftdGR(f)=GT∗(f)e−j2πft0
不考虑相频特性,只考虑幅频特性,可得:
∣ G R ( f ) ∣ = ∣ G T ( f ) ∣ = ∣ X r c ( f ) ∣ \Big|G_R(f)\Big| = \Big|G_T(f)\Big| = \sqrt{\Big|X_{rc}(f)\Big|} ∣∣∣GR(f)∣∣∣=∣∣∣GT(f)∣∣∣=∣∣∣Xrc(f)∣∣∣
综上可得,理想带限的AWGN信道条件下的数字PAM信号的最佳基带传输系统如下所示:
信道均衡
由于实际信道的传输特性不理想,在判决之前插入一种信道均衡器,用来补偿信道特性的不完善。
H ( f ) = G T ( f ) C ( f ) G R ( f ) G E ( f ) = X ( f ) G E ( f ) H(f) = G_T(f)C(f)G_R(f){\color{blue}G_E(f)} = X(f){\color{blue}G_E(f)} H(f)=GT(f)C(f)GR(f)GE(f)=X(f)GE(f)
设计 G E ( f ) G_E(f) GE(f)使得 H ( f ) H(f) H(f)满足奈奎斯特第一准则。
眼图
用示波器观察接收信号的波形,以判断是否是最佳接收。
部分响应系统
为了实现无码间干扰, X ( f ) X(f) X(f)要求被设计为理想低通或者滚降特性,理想低通物理不可实现,而且第一个零点后的尾巴振幅大、收敛慢,而滚降特性虽然“尾巴“振幅减小了,但是需要的带宽更多,那么有没有一种频带利用率既高、“尾巴”衰减又大、收敛又快的传输波形呢?
部分响应系统就解决了这个问题,它利用了相关编码引入受控码间干扰的基带传输系统,该系统所形成的波形称为部分响应波形。