Apollo Planning决策规划算法代码详细解析 (1):Scenario选择
本文重点讲解Apollo代码中怎样配置Scenario以及选择当前Scenario,Scenario场景决策是Apollo规划算法的第一步,本文会对代码进行详细解析,也会梳理整个决策流程,码字不易,喜欢的朋友们麻烦点个关注与赞。
Apollo Planning决策规划系列文章:
Apollo Planning决策规划代码详细解析 (2):Scenario执行
Apollo Planning决策规划代码详细解析 (3):stage执行
Apollo Planning决策规划代码详细解析 (4):Stage逻辑详解
Apollo Planning决策规划代码详细解析 (5):规划算法流程介绍
Apollo Planning决策规划代码详细解析 (6): LaneChangeDecider
Apollo Planning决策规划代码详细解析 (7): PathReuseDecider
Apollo Planning决策规划代码详细解析 (8): PathLaneBorrowDecide
Apollo Planning决策规划代码详细解析 (9): PathBoundsDecider
Apollo Planning决策规划代码详细解析 (10):PiecewiseJerkPathOptimizer
Apollo Planning决策规划代码详细解析 (11): PathAssessmentDecider
Apollo Planning决策规划代码详细解析 (12): PathDecider
Apollo Planning决策规划代码详细解析 (13): RuleBasedStopDecider
Apollo Planning决策规划算法代码详细解析 (14):SPEED_BOUNDS_PRIORI_DECIDER
Apollo Planning决策规划算法代码解析(15): 速度动态规划SPEED_HEURISTIC_OPTIMIZER 上
Apollo Planning决策规划算法代码解析 (16):SPEED_HEURISTIC_OPTIMIZER 速度动态规划中
Apollo Planning决策规划算法代码解析 (17):SPEED_HEURISTIC_OPTIMIZER 速度动态规划下
算法介绍文章:
Apollo决策规划算法Planning : Piecewise Jerk Path Optimizer的python实现
仿真技术介绍文章:
prescan联合simulink进行FCW的仿真_自动驾驶 Player的博客-CSDN博客
如果对apollo规划算法感兴趣,想学习完整的系列文章,可以订阅下面专栏:https://blog.csdn.net/nn243823163/category_11685852.html https://blog.csdn.net/nn243823163/category_11685852.html
https://blog.csdn.net/nn243823163/category_11685852.html
正文如下:
本文重点讲解Apollo代码中怎样配置Scenario以及选择当前Scenario,Scenario决策是Apollo规划算法的第一步,本文会对代码进行详细解析,也会梳理整个决策流程,码字不易,喜欢的朋友们麻烦点个关注与赞。
在本文你将学到下面这些内容:
- 规划器planer的种类;
- 规划器planer的主要函数及逻辑;
- 场景管理类ScenarioManager的运行机制;
- 场景注册方法;
- 场景决策流程,如何选择当前场景
- 详细的apollo决策规划代码分析
代码具体过程如下:
0、规划算法的入口
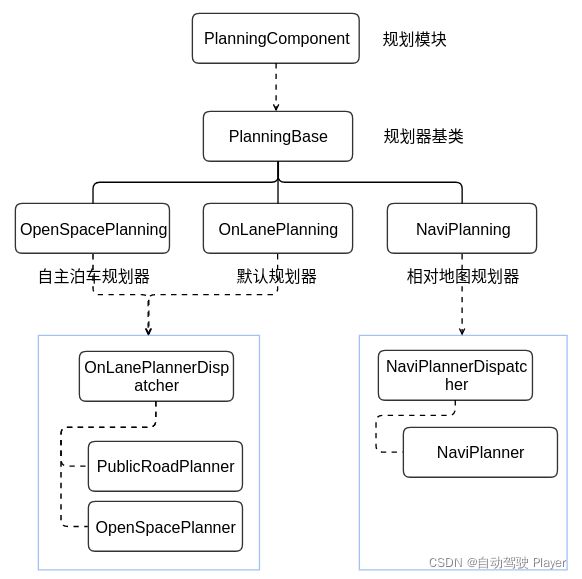
(1)规划模块的入口函数是PlanningComponent的Proc。
(2)以规划模式OnLanePlanning,执行RunOnce。在RunOnce中先执行交通规则,再规划轨迹。规划轨迹的函数是Plan。
1、Scenario的判断在Planer中进行,目前Apollo共有下面这些planer,其中最常用的就是EM规划器,即PublicRoadPlanner,本系列主要介绍PublicRoadPlanner这个Planer。
2、Apollo会根据配置调用PublicRoadPlanner这个planer,关于配置方法,之后会在另外一篇博文进行更新。PublicRoadPlanner主要有init()与plan()两个重要的函数,inti()是规划器的初始化,plan就是具体的规划过程。
class PublicRoadPlanner : public PlannerWithReferenceLine {
public:
/**
* @brief Constructor
*/
PublicRoadPlanner() = delete;
explicit PublicRoadPlanner(
const std::shared_ptr& injector)
: PlannerWithReferenceLine(injector) {}
/**
* @brief Destructor
*/
virtual ~PublicRoadPlanner() = default;
void Stop() override {}
std::string Name() override { return "PUBLIC_ROAD"; }
common::Status Init(const PlanningConfig& config) override;
/**
* @brief Override function Plan in parent class Planner.
* @param planning_init_point The trajectory point where planning starts.
* @param frame Current planning frame.
* @return OK if planning succeeds; error otherwise.
*/
common::Status Plan(const common::TrajectoryPoint& planning_init_point,
Frame* frame,
ADCTrajectory* ptr_computed_trajectory) override;
}; 3、scenario的选择在Plan() 函数的update阶段,主要用的是ScenarioManager类的updata函数。ScenarioManager并不属于某个特定的planer,这个类只针对于scenario,每个planer都可以调用它来管理场景。下面代码片段是PublicRoadPlanner的Plan()函数。
Status PublicRoadPlanner::Plan(const TrajectoryPoint& planning_start_point,
Frame* frame,
ADCTrajectory* ptr_computed_trajectory) {
// 决策当前应该执行哪个场景
scenario_manager_.Update(planning_start_point, *frame);
// 获取当前场景
scenario_ = scenario_manager_.mutable_scenario();
// 处理当前场景
auto result = scenario_->Process(planning_start_point, frame);
// 打印debug信息
if (FLAGS_enable_record_debug) {
auto scenario_debug = ptr_computed_trajectory->mutable_debug()
->mutable_planning_data()
->mutable_scenario();
scenario_debug->set_scenario_type(scenario_->scenario_type());
scenario_debug->set_stage_type(scenario_->GetStage());
scenario_debug->set_msg(scenario_->GetMsg());
}
// 场景处理成功
if (result == scenario::Scenario::STATUS_DONE) {
// only updates scenario manager when previous scenario's status is
// STATUS_DONE
scenario_manager_.Update(planning_start_point, *frame);
}
// 场景处理失败
else if (result == scenario::Scenario::STATUS_UNKNOWN) {
return Status(common::PLANNING_ERROR, "scenario returned unknown");
}
return Status::OK();
}4、ScenarioManager会实例化一个全局的scenario_manager_对象来进行场景管理,在PublicRoadPlanner初始化时会调用配置文件里的参数来建立这个对象。
Status PublicRoadPlanner::Init(const PlanningConfig& config) {
config_ = config;
scenario_manager_.Init(config);
return Status::OK();
}调用ScenarioManager类的init()函数,并且根据当前planer的配置来注册场景。
bool ScenarioManager::Init(
const std::set& supported_scenarios) {
// 注册场景
RegisterScenarios();
default_scenario_type_ = ScenarioConfig::LANE_FOLLOW;
supported_scenarios_ = supported_scenarios;
// 创建场景,默认为lane_follow
current_scenario_ = CreateScenario(default_scenario_type_);
return true;
} 目前PublicRoadPlanner支持下面这些场景
// 还是在"/conf/planning_config.pb.txt"中
standard_planning_config {
planner_type: PUBLIC_ROAD
planner_type: OPEN_SPACE
planner_public_road_config {
// 支持的场景
scenario_type: LANE_FOLLOW // 车道线保持
scenario_type: SIDE_PASS // 超车
scenario_type: STOP_SIGN_UNPROTECTED // 停止
scenario_type: TRAFFIC_LIGHT_PROTECTED // 红绿灯
scenario_type: TRAFFIC_LIGHT_UNPROTECTED_LEFT_TURN // 红绿灯左转
scenario_type: TRAFFIC_LIGHT_UNPROTECTED_RIGHT_TURN // 红绿灯右转
scenario_type: VALET_PARKING // 代客泊车
}5、ScenarioManager类的Update()函数,用来决策当前处在什么场景。如果进入了新的场景,会创建一个新的对象来进行之后的规划逻辑。
void ScenarioManager::Update(const common::TrajectoryPoint& ego_point,
const Frame& frame) {
ACHECK(!frame.reference_line_info().empty());
Observe(frame);
ScenarioDispatch(frame);
}场景决策逻辑在ScenarioDispatch(frame)当中,会根据配置选择基于规则还是基于学习的决策方法。
void ScenarioManager::ScenarioDispatch(const Frame& frame) {
ACHECK(!frame.reference_line_info().empty());
ScenarioConfig::ScenarioType scenario_type;
int history_points_len = 0;
if (injector_->learning_based_data() &&
injector_->learning_based_data()->GetLatestLearningDataFrame()) {
history_points_len = injector_->learning_based_data()
->GetLatestLearningDataFrame()
->adc_trajectory_point_size();
}
if ((planning_config_.learning_mode() == PlanningConfig::E2E ||
planning_config_.learning_mode() == PlanningConfig::E2E_TEST) &&
history_points_len >= FLAGS_min_past_history_points_len) {
scenario_type = ScenarioDispatchLearning();
} else {
scenario_type = ScenarioDispatchNonLearning(frame);
}
ADEBUG << "select scenario: "
<< ScenarioConfig::ScenarioType_Name(scenario_type);
// update PlanningContext
UpdatePlanningContext(frame, scenario_type);
if (current_scenario_->scenario_type() != scenario_type) {
current_scenario_ = CreateScenario(scenario_type);
}
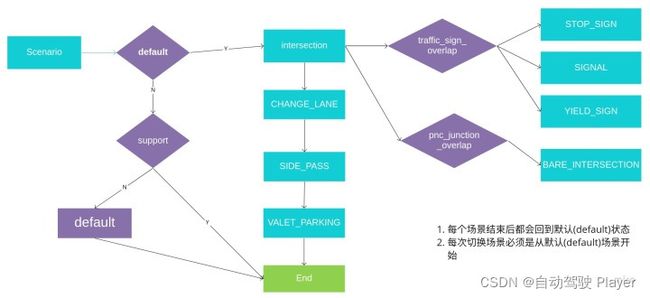
}6、ScenarioDispatchNonLearning()函数默认从lanefollow场景开始判断,首先根据驾驶员的意图来安排场景,如果不是默认的lanefollow场景,直接输出当前场景;如果是lanefollow场景,会依次判断是否属于别的场景;即剩余场景之间的跳转必须经过lanefollow这个场景。
ScenarioConfig::ScenarioType ScenarioManager::ScenarioDispatchNonLearning(
const Frame& frame) {
// default: LANE_FOLLOW
ScenarioConfig::ScenarioType scenario_type = default_scenario_type_;
// Pad Msg scenario
scenario_type = SelectPadMsgScenario(frame);
const auto vehicle_state_provider = injector_->vehicle_state();
common::VehicleState vehicle_state = vehicle_state_provider->vehicle_state();
const common::PointENU& target_point =
frame.local_view().routing->routing_request().dead_end_info().target_point();
const common::VehicleState& car_position = frame.vehicle_state();
if (scenario_type == default_scenario_type_) {
// check current_scenario (not switchable)
switch (current_scenario_->scenario_type()) {
case ScenarioConfig::LANE_FOLLOW:
case ScenarioConfig::PULL_OVER:
break;
case ScenarioConfig::BARE_INTERSECTION_UNPROTECTED:
case ScenarioConfig::EMERGENCY_PULL_OVER:
case ScenarioConfig::PARK_AND_GO:
case ScenarioConfig::STOP_SIGN_PROTECTED:
case ScenarioConfig::STOP_SIGN_UNPROTECTED:
case ScenarioConfig::TRAFFIC_LIGHT_PROTECTED:
case ScenarioConfig::TRAFFIC_LIGHT_UNPROTECTED_LEFT_TURN:
case ScenarioConfig::TRAFFIC_LIGHT_UNPROTECTED_RIGHT_TURN:
case ScenarioConfig::VALET_PARKING:
case ScenarioConfig::DEADEND_TURNAROUND:
// transfer dead_end to lane follow, should enhance transfer logic
if (JudgeReachTargetPoint(car_position, target_point)) {
scenario_type = ScenarioConfig::LANE_FOLLOW;
reach_target_pose_ = true;
}
case ScenarioConfig::YIELD_SIGN:
// must continue until finish
if (current_scenario_->GetStatus() !=
Scenario::ScenarioStatus::STATUS_DONE) {
scenario_type = current_scenario_->scenario_type();
}
break;
default:
break;
}
}
// ParkAndGo / starting scenario
if (scenario_type == default_scenario_type_) {
if (FLAGS_enable_scenario_park_and_go && !reach_target_pose_) {
scenario_type = SelectParkAndGoScenario(frame);
}
}
// intersection scenarios
if (scenario_type == default_scenario_type_) {
scenario_type = SelectInterceptionScenario(frame);
}
// pull-over scenario
if (scenario_type == default_scenario_type_) {
if (FLAGS_enable_scenario_pull_over) {
scenario_type = SelectPullOverScenario(frame);
}
}
// VALET_PARKING scenario
if (scenario_type == default_scenario_type_) {
scenario_type = SelectValetParkingScenario(frame);
}
// dead end
if (scenario_type == default_scenario_type_) {
scenario_type = SelectDeadEndScenario(frame);
}
return scenario_type;
}7、在场景判断时,首先调用函数SelectPadMsgScenario(),根据驾驶员意图来安排场景.
ScenarioConfig::ScenarioType ScenarioManager::SelectPadMsgScenario(
const Frame& frame) {
const auto& pad_msg_driving_action = frame.GetPadMsgDrivingAction();
switch (pad_msg_driving_action) {
case DrivingAction::PULL_OVER:
if (FLAGS_enable_scenario_emergency_pull_over) {
return ScenarioConfig::EMERGENCY_PULL_OVER;
}
break;
case DrivingAction::STOP:
if (FLAGS_enable_scenario_emergency_stop) {
return ScenarioConfig::EMERGENCY_STOP;
}
break;
case DrivingAction::RESUME_CRUISE:
if (current_scenario_->scenario_type() ==
ScenarioConfig::EMERGENCY_PULL_OVER ||
current_scenario_->scenario_type() ==
ScenarioConfig::EMERGENCY_STOP) {
return ScenarioConfig::PARK_AND_GO;
}
break;
default:
break;
}
return default_scenario_type_;
}8、可以看到,除了驾驶员行为相关的两个场景外,每次切换场景必须是从默认场景(LANE_FOLLOW)开始,即每次场景切换之后都会回到默认场景。
9、以上即为apollo场景决策逻辑。后续文章会讲场景选择之后,怎么进行下一步的规划算法。