Ubuntu20.04 运行Fast-Planner
运行环境:
ubuntu20.04 + ros-noetic
g++ 9.4
Eigen3.3.9
源码下载编译
1 创建工作空间克隆源码
mkdir -p fast_ws/src
cd fast_ws/src
git clone https://github.com/HKUST-Aerial-Robotics/Fast-Planner.git
cd ..
注:用git clone需要在自带终端,在terminator克隆不下来。
2 安装两个包
1 安装C++线性代数库
sudo apt install libarmadillo-dev
2 安装非线性优化库
这个有两种方法安装,第一种方法是用apt软件仓库输入命令sudo apt install ros-noetic-nlopt直接安装,第二种方法是下载源码用cmake安装。如果是ubuntu16.04或者ubuntu18.04可以直接从apt安装,比源码安装方便。但是ubuntu20.04用第一种方法安装会报错用不了,(不信可以试试)所以得用源码安装,README里也提到了这个问题,编译不报错但是生不出来轨迹。
安装过程也很简单,命令如下:
//先进入document目录,用源码下载的其他库都可以放在这
git clone https://github.com/stevengj/nlopt.git
cd nlopt
mkdir build && cd build
cmake ..
make
sudo make install
至此两个必要的安装包已经安装完成了。
接下来可以回到工作空间运行catkin_make命令进行编译了,也会报出一系列错误。
编译报错
1 C++14问题

没把C++11改成C++14之前编译会报很多类似上面的错,所以要去到每个CMakeLists.txt里把C++11改成C++14。
2 nlopt问题
由于bspline_opt中的CMakeLists.txt找的是ros-noetic-nlopt,没安装就会报下面这个错:
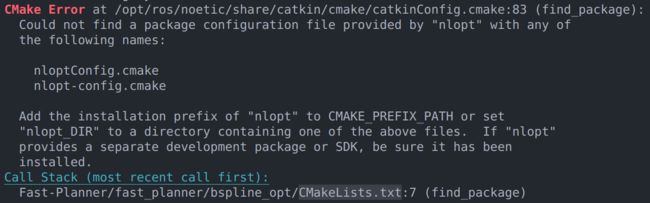
所以需要修改一下bspline_opt中的CMakeLists.txt,找到用源码安装的nlopt,这个可以按照README的提示修改,也可以直接复制我修改完的txt:
cmake_minimum_required(VERSION 2.8.3)
project(bspline_opt)
find_package(NLopt REQUIRED)
set(NLopt_INCLUDE_DIRS ${NLOPT_INCLUDE_DIR})
find_package(Eigen3 REQUIRED)
find_package(PCL 1.7 REQUIRED)
find_package(catkin REQUIRED COMPONENTS
roscpp
rospy
std_msgs
visualization_msgs
cv_bridge
plan_env
)
catkin_package(
INCLUDE_DIRS include
LIBRARIES bspline_opt
CATKIN_DEPENDS plan_env
# DEPENDS system_lib
)
include_directories(
SYSTEM
include
${catkin_INCLUDE_DIRS}
${Eigen3_INCLUDE_DIRS}
${PCL_INCLUDE_DIRS}
${NLOPT_INCLUDE_DIR}
)
set(CMAKE_CXX_FLAGS "-std=c++14 ${CMAKE_CXX_FLAGS} -O3 -Wall")
add_library( bspline_opt
src/bspline_optimizer.cpp
)
target_link_libraries( bspline_opt
${catkin_LIBRARIES}
${NLOPT_LIBRARIES}
)
修改完之后再次编译,就可以编译成功了。
运行崩溃
安装README的提示运行,点击一个目标点后会报错。
1 运行rviz那个窗口报错/world问题
![]()
解决这个问题需要到/Fast-Planner/uav_simulator/Utils/odom_visualization/src/odom_visualization.cpp中把/world前面的/去掉,ubuntu20.04对/敏感。改完编译运行后会看到小飞机出来了,但是还有其他错。
2 Segmentation fault
报错如下图所示:

你们可能有#6,没关系,这个需要改几个函数,这几个函数返回值有问题。
(1)到/Fast-Planner/fast_planner/path_searching/src/kinodynamic_astar.cpp里搜KinodynamicAstar::timeToIndex函数,可以看到函数返回值是int,但是函数体没有return,修改完如下
int KinodynamicAstar::timeToIndex(double time)
{
int idx = floor((time - time_origin_) * inv_time_resolution_);
return idx;
}
(2)到Fast-Planner/fast_planner/plan_env/include/edt_environment.h第69和71行,把返回值类型改成void,再去cpp文件中84到118行做同样修改。
void interpolateTrilinear(double values[2][2][2], const Eigen::Vector3d& diff,
double& value, Eigen::Vector3d& grad);
void evaluateEDTWithGrad(const Eigen::Vector3d& pos, double time,
double& dist, Eigen::Vector3d& grad);
void EDTEnvironment::interpolateTrilinear(double values[2][2][2],
const Eigen::Vector3d& diff,
double& value,
Eigen::Vector3d& grad) {
// trilinear interpolation
double v00 = (1 - diff(0)) * values[0][0][0] + diff(0) * values[1][0][0];
double v01 = (1 - diff(0)) * values[0][0][1] + diff(0) * values[1][0][1];
double v10 = (1 - diff(0)) * values[0][1][0] + diff(0) * values[1][1][0];
double v11 = (1 - diff(0)) * values[0][1][1] + diff(0) * values[1][1][1];
double v0 = (1 - diff(1)) * v00 + diff(1) * v10;
double v1 = (1 - diff(1)) * v01 + diff(1) * v11;
value = (1 - diff(2)) * v0 + diff(2) * v1;
grad[2] = (v1 - v0) * resolution_inv_;
grad[1] = ((1 - diff[2]) * (v10 - v00) + diff[2] * (v11 - v01)) * resolution_inv_;
grad[0] = (1 - diff[2]) * (1 - diff[1]) * (values[1][0][0] - values[0][0][0]);
grad[0] += (1 - diff[2]) * diff[1] * (values[1][1][0] - values[0][1][0]);
grad[0] += diff[2] * (1 - diff[1]) * (values[1][0][1] - values[0][0][1]);
grad[0] += diff[2] * diff[1] * (values[1][1][1] - values[0][1][1]);
grad[0] *= resolution_inv_;
}
void EDTEnvironment::evaluateEDTWithGrad(const Eigen::Vector3d& pos,
double time, double& dist,
Eigen::Vector3d& grad) {
Eigen::Vector3d diff;
Eigen::Vector3d sur_pts[2][2][2];
sdf_map_->getSurroundPts(pos, sur_pts, diff);
double dists[2][2][2];
getSurroundDistance(sur_pts, dists);
interpolateTrilinear(dists, diff, dist, grad);
}
修改完之后,再编译运行即可成功运行,如下图所示:
