【图像处理】深入解析HOG算法
问题
在深度学习目标检测算法问世之前,HOG+SVM可以说是最经典的传统目标检测算法了,既然是经典,那自然需要了解了解对吧。所以今天我们就来看一看,HOG是如何进行特征提取的。
HOG简介
HOG(Histogram of Oriented Gradient,即方向梯度直方图)是应用在计算机视觉和图像处理领域,用于目标检测的特征描述子,由Navneet Dalal和Bill Triggs等人在2005年CVPR发表的论文上提出。HOG通过计算和统计图像局部区域的梯度方向直方图来构建特征,结合SVM等分类器常用于图像识别等领域,尤其在行人检测中具有非常不错的表现。
HOG特征描述原理
● 主要思想:
在一幅图像中,局部目标的表象和形状(appearance and shape)能够被梯度或边缘的方向密度分布很好地描述。(本质:梯度的统计信息,而梯度主要存在于边缘的地方)。
● 具体操作:
先将图像划分为若干个cell,然后计算各个cell中每个像素点的梯度和边缘方向,然后分别统计每个cell的方向梯度直方图,构成了每个cell的特征描述子;
为了对光照和阴影有更好的不变性,需要对直方图进行对比度归一化,具体可以通过将局部直方图在图像更大的范围内(称为block)进行对比度归一化。组合每个block中归一化后的所有cell的descriptor,就构成了该block的descriptor。
最后将所有block的descriptor组合起来就是整幅图像的HOG特征描述子。
HOG特征检测步骤
- 计算图像每个像素点的梯度大小和方向
- 将图像划分成若干个cell
- 统计每个cell的方向梯度直方图
- 将相邻的若干个cell组成更大的block
- 对每个block的进行对比度归一化
- 将归一化后的所有block特征描述子组合在一起,构成整幅图像的descriptor
然后就可以将整幅图像的HOG特征向量结合SVM等机器学习算法进行训练,实现目标检测任务了。
通过上面的介绍,想必对HOG的原理已经有了大致的理解了,但对于过程中每一步具体怎么操作的是不是还有点模糊呢?不着急,我们接着往下看。。。
HOG算法具体实现
注意,有些文章或博客中HOG算法实现步骤中可能给出第一步是先进行图像预处理,如Gamma校正,即对图像的颜色空间进行归一化,其目的是调节图像的对比度,降低图像局部阴影和光照的影响,同时可以抑制噪声。但后来作者指出这一步其实可以省略掉,因为后面步骤中的block归一化处理能达到同样的效果,而图像预处理的贡献微薄,所以第一步可以直接计算梯度和方向。
1.梯度计算
计算图像上每个像素点的梯度大小和方向:
水 平 方 向 梯 度 : G x ( x , y ) = I ( x + 1 , y ) − I ( x − 1 , y ) 垂 直 方 向 梯 度 : G y ( x , y ) = I ( x , y + 1 ) − I ( x , y − 1 ) 每 个 像 素 点 在 ( x , y ) 处 的 梯 度 幅 值 和 方 向 分 别 为 : 幅 值 : G ( x , y ) = G x ( x , y ) 2 + G y ( x , y ) 2 方 向 : α = a r c t a n G y ( x , y ) G x ( x , y ) 水平方向梯度:\quad G_{x}(x,y) = I(x+1,y)-I(x-1,y) \\ 垂直方向梯度:\quad G_{y}(x,y) = I(x,y+1)-I(x,y-1) \\ 每个像素点在(x,y)处的梯度幅值和方向分别为:\qquad \\ 幅值: G(x,y) = \sqrt {G_{x}(x,y)^{2}+G_{y}(x,y)^2}\\ 方向: \alpha = arctan\frac{G_{y}(x,y)}{G_{x}(x,y)} \qquad \qquad \qquad 水平方向梯度:Gx(x,y)=I(x+1,y)−I(x−1,y)垂直方向梯度:Gy(x,y)=I(x,y+1)−I(x,y−1)每个像素点在(x,y)处的梯度幅值和方向分别为:幅值:G(x,y)=Gx(x,y)2+Gy(x,y)2方向:α=arctanGx(x,y)Gy(x,y)
2.计算梯度方向直方图
首先将图像划分为若干个cell,大小可以自由设定,例如将整幅图像划分为8×8个cell,每个cell都包含若干个像素。
然后分别统计每个cell的方向梯度直方图,大量的实验表明,统计直方图时采用9个bin来统计方向信息效果较好。具体来说就是,将cell的梯度方向 0~180°(或 0~360°,即考虑了正负)分成9个方向块,如下图所示:
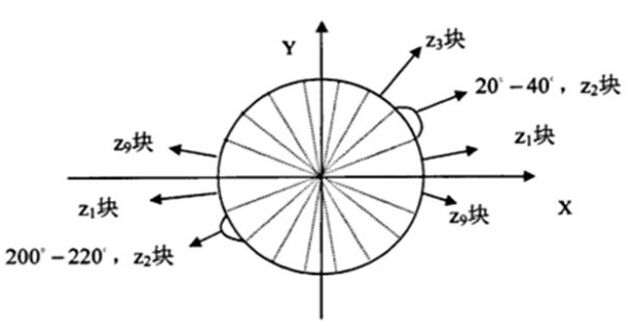
在直方图中,每 20° 组成一个bin,当梯度方向落在某个bin范围中,该bin上的计数就增加(可以理解为按照梯度方向来进行投影的过程)。那相应的bin计数应该增加多少呢?Dalal和Triggs等人认为,将梯度幅值大小作为投影权值效果通常较好。也就是说,假设某个像素点的梯度大小为3,其梯度方向刚好落在 20~40°之间,那么该bin上的计数就增加3(也就是将梯度大小作为权值用来计数)。通过这样的一 一映射,对于每个cell,都可以映射成9个bin的方向梯度直方图,即每个cell都是9维的descriptor。
3.block归一化
由于局部光照的变化,以及前景背景对比度的变化,会使得梯度强度的变化范围非常大,因此需要对梯度做局部对比度归一化。归一化能够进一步对光照、阴影、边缘进行压缩,使得特征向量对光照、阴影和边缘变化具有鲁棒性。
具体如何操作?
作者的做法是:将多个cell组成更大的block,然后对每个block进行对比度归一化。图像最终的HOG特征描述子就是所有block内的cell的直方图构成的向量。事实上,块之间是有重叠的,也就是说,每个细胞单元的直方图都会被多次用于最终的描述子的计算。块之间的重叠看起来有冗余,但可以显著的提升性能 。
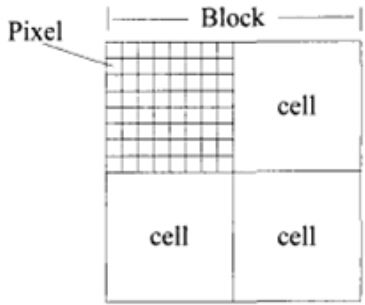
如上图所示,每个block由2×2个cell组成,每个cell包含8×8个像素,每个cell得到9个方向的bin,因此每个block的特征向量维度为2×2×9=36维。
作者采用的归一化方法有4种:( ∣ ∣ v ∣ ∣ k ||v||_{k} ∣∣v∣∣k表示 v v v 的 k k k 阶范数, e e e 是一个很小的常数)
(就是全部向量除以整个向量的平方和的开方)
L 2 − n o r m : f = v ∣ ∣ v ∣ ∣ 2 2 + e 2 L 2 − h y s : 先 计 算 L 2 范 数 , 然 后 限 制 v 的 最 大 值 为 0.2 , 再 进 行 归 一 化 L 1 − n o r m : f = v ∣ ∣ v ∣ ∣ 1 + e 2 L 1 − s q r t : f = v ∣ ∣ v ∣ ∣ 1 + e 2 L2-norm:\quad f=\frac{v}{\sqrt{||v||_{2}^{2}+e^{2}}}\\ L2-hys: \quad 先计算L2范数,然后限制v的最大值为0.2,再进行归一化\\ L1-norm:\quad f=\frac{v}{||v||_{1}+e^{2}}\\ L1-sqrt:\quad f=\sqrt{\frac{v}{||v||_{1}+e^{2}}} L2−norm:f=∣∣v∣∣22+e2vL2−hys:先计算L2范数,然后限制v的最大值为0.2,再进行归一化L1−norm:f=∣∣v∣∣1+e2vL1−sqrt:f=∣∣v∣∣1+e2v
4.提取HOG特征
最后一步就是将归一化后所有的block进行HOG特征的提取,并将它们结合成最终的特征向量送入分类器。
那一张图像的HOG特征维度是多少呢?
例如,一张大小为64×128的图像,每个block由2×2个cell组成,每个cell包含8×8个像素,每个cell计算9个bin的方向梯度直方图,以8个像素为步长,则水平方向有15个扫描窗口,垂直方向有7个扫描窗口,所以整幅图像的HOG特征维度为15×7×2×2×9=3780维。
参考资料
目标检测的图像特征提取之(一)HOG特征 https://blog.csdn.net/zouxy09/article/details/7929348
第十八节、基于传统图像处理的目标检测与识别(HOG+SVM附代码) https://www.cnblogs.com/zyly/p/9651261.html