(02)Cartographer源码无死角解析-(33) LocalTrajectoryBuilder2D: 点云数据流向、处理、消息发布等→流程复盘
讲解关于slam一系列文章汇总链接:史上最全slam从零开始,针对于本栏目讲解(02)Cartographer源码无死角解析-链接如下:
(02)Cartographer源码无死角解析- (00)目录_最新无死角讲解:https://blog.csdn.net/weixin_43013761/article/details/127350885
文 末 正 下 方 中 心 提 供 了 本 人 联 系 方 式 , 点 击 本 人 照 片 即 可 显 示 W X → 官 方 认 证 {\color{blue}{文末正下方中心}提供了本人 \color{red} 联系方式,\color{blue}点击本人照片即可显示WX→官方认证} 文末正下方中心提供了本人联系方式,点击本人照片即可显示WX→官方认证
一、前言
关于 LocalTrajectoryBuilder2D 有关于点云数据处理得部分已经讲解完成了,但是比较杂,比较乱,因为很多地方可能都是跳着讲解得。为了方便大家的理解,这里把相关的总要环节都复盘一下。首相再重述一下之前已经讲解过的数据系统构建过程。
( 1 ) \color{blue}(1) (1) 已经知道每新建一条轨迹就会创建一个 CreateGlobalTrajectoryBuilder2D或者 CreateGlobalTrajectoryBuilder3D对象,该对象的实例化位于 MapBuilder::AddTrajectoryBuilder() 函数中。实例化 CreateGlobalTrajectoryBuilder 对象时,会传入一个回调函数 local_slam_result_callback,该函数为 MapBuilderBridge::AddTrajectory 中的表达式:
// lambda表达式 local_slam_result_callback_
[this](const int trajectory_id,
const ::cartographer::common::Time time,
const Rigid3d local_pose,
::cartographer::sensor::RangeData range_data_in_local,
const std::unique_ptr<
const ::cartographer::mapping::TrajectoryBuilderInterface::
InsertionResult>) {
// 保存local slam 的结果数据 5个参数实际只用了4个
OnLocalSlamResult(trajectory_id, time, local_pose, range_data_in_local);
}
暂且先放一下,只需要知道其核心时调用 OnLocalSlamResult() 函数即可。
( 2 ) \color{blue}(2) (2) CreateGlobalTrajectoryBuilder(2D或3D) 对象中包含着一个 LocalTrajectoryBuilder(2D或3D)对象。CreateGlobalTrajectoryBuilder 在把雷达数据分发给 LocalTrajectoryBuilder 之前,会通过阻塞的方式对所有数据按时间进行排序(fix与Landmar可以通过参数配置取消)。
阻塞排序分发数据最重要的就是 cartographer::sensor::Collator 这个类,因为 Collator 中存在变量 OrderedMultiQueue queue_; 该变量中的核心函数 OrderedMultiQueue::Dispatch() 起到了按时间分发数据的主要作用,这里的时间同步,与后续激光雷达点云数据的时间同步时不一样的,回顾之前的内容如下:
(0, scan): { 4, }
(0, imu): {1, 3, 5, }
(0, odom): { 2, 6,}
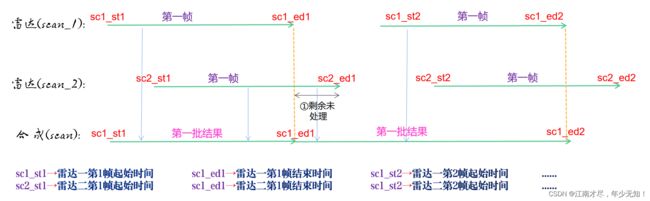
这里的时间同步,是针对于所有传感器的数据,按时间戳分发数据。而激光雷达数据的时间同步,是把多个激光雷达数据进行混合,之前的分析图如下:
( 3 ) \color{blue}(3) (3) CreateGlobalTrajectoryBuilder 接收到数据之后,就会转发至 LocalTrajectoryBuilder2D 或者 LocalTrajectoryBuilder3D 如果是激光雷达数据,则是调用到 LocalTrajectoryBuilder2D(3D)::AddRangeData() 函数。
二、激光雷达点云数据处理
1、多雷达数据时间同步
这里主要以 LocalTrajectoryBuilder2D 处理点云数据为例,经过 CreateGlobalTrajectoryBuilder 转发到 LocalTrajectoryBuilder2D 的数据,即调用 LocalTrajectoryBuilder2D::AddRangeData() 函数进行处理的数据,已经是按时间分发的了,但是多个激光雷达的点云数据分开的,所以需要多个激光雷达传感器的点云数据进行时间同步,其核心就是上面的图示: 点云数据时间同步。主要代码位于
//src/cartographer/cartographer/mapping/internal/range_data_collator.cc
LocalTrajectoryBuilder2D::AddRangeData()
//src/cartographer/cartographer/mapping/internal/range_data_collator.cc
sensor::TimedPointCloudOriginData RangeDataCollator::AddRangeData()
该代码再前面已经进行过十分详细的讲解,所以这里就不再深入了。需要注意的是,这里同步之后的点云数据依旧是相对于机器人坐标系的,这里记为 P o i n t t r a c k i n g Point^{tracking} Pointtracking
2、获取local坐标系机器人位姿
获得时间同步之后相对于机器人坐标系的点云数据 P o i n t t r a c k i n g Point^{tracking} Pointtracking 之后,就是需要对点云数据做畸变校正,其核心思想是利用每个点云数据生成时的机器人位姿(相对于local坐标系),对每个点云进行校正。机器人某个时刻点的位姿,是使用位姿推断器推测出来,核心代码如下:
//src/cartographer/cartographer/mapping/internal/2d/local_trajectory_builder_2d.cc
LocalTrajectoryBuilder2D::AddRangeData(const std::string& sensor_id, const sensor::TimedPointCloudData& unsynchronized_data)
// 预测得到每一个时间点的位姿
for (const auto& range : synchronized_data.ranges) {
// Step: 2 预测出 每个点的时间戳时刻, tracking frame 在 local slam 坐标系下的位姿
range_data_poses.push_back(extrapolator_->ExtrapolatePose(time_point).cast<float>());
也就是说,range_data_poses 中存储的就是每个点云生成时机器人相对于 local 坐标系的位姿。这里表示为 R o b o t t r a c k i n g l o c a l \mathbf {Robot}^{local}_{tracking} Robottrackinglocal。
3、点云数据运动畸变校正
利用位姿推断器推测推测出机器人相对于 local 坐标系的位姿,那么可以利用其对点云数据进行校正,校正的过程的就是把点云数据变换到 local 坐标系下面,核心代码如下所示:
//src/cartographer/cartographer/mapping/internal/2d/local_trajectory_builder_2d.cc
LocalTrajectoryBuilder2D::AddRangeData(const std::string& sensor_id, const sensor::TimedPointCloudData& unsynchronized_data)
// Step: 3 运动畸变的去除, 将相对于tracking_frame的hit坐标 转成 local坐标系下的坐标
// 把点云数据变换到 local slam 坐标系下
sensor::RangefinderPoint hit_in_local =
range_data_poses[i] * sensor::ToRangefinderPoint(hit);
其对应的公式如下:
P o i n t l o c a l = R o b o t t r a c k i n g l o c a l ∗ P o i n t t r a c k i n g (01) \color{Green} \tag{01} Point^{local}=\mathbf {Robot}^{local}_{tracking} * Point^{tracking} Pointlocal=Robottrackinglocal∗Pointtracking(01)校正过的数据,会进行积累,积累 num_accumulated_range_data 帧校正过后的数据之后,最终存储于 num_accumulated_range_data 变量中。
4、点云数据重力对齐
对点云数据校正之后,会进行重力对齐,重力对齐的核心代码如下所示:
//src/cartographer/cartographer/mapping/internal/2d/local_trajectory_builder_2d.cc
LocalTrajectoryBuilder2D::AddRangeData(const std::string& sensor_id, const sensor::TimedPointCloudData& unsynchronized_data)
// 获取重力对齐变换矩阵,该矩阵只包含旋转,平移为0,
//可理解机器人坐标系的Z轴需要与重力矢量平行
const transform::Rigid3d gravity_alignment = transform::Rigid3d::Rotation(
extrapolator_->EstimateGravityOrientation(time));
TransformToGravityAlignedFrameAndFilter(
gravity_alignment.cast<float>() * range_data_poses.back().inverse(),
accumulated_range_data_)
这里记重力对齐矩阵为 G r a v i t y A l i g n m e n g l o c a l g r a v i t y \mathbf {GravityAlignmeng}^{gravity}_{local} GravityAlignmenglocalgravity
G r a v i t y A l i g n m e n g l o c a l g r a v i t y = G r a v i t y A l i g n m e n g t r a c k i n g g r a v i t y ∗ [ R o b o t t r a c k i n g l o a c l ] − 1 (02) \color{Green} \tag{02} \mathbf {GravityAlignmeng}^{gravity}_{local}=\mathbf {GravityAlignmeng}^{gravity }_{tracking}*[\mathbf {Robot}^{loacl}_{tracking}]^{-1} GravityAlignmenglocalgravity=GravityAlignmengtrackinggravity∗[Robottrackingloacl]−1(02)实际上可以理解为对 local 坐标系做了一个旋转,然后把该变换矩阵应用在点云数据上,公式如下: P o i n t g r a v i t y = G r a v i t y A l i g n m e n g l o c a l g r a v i t y ∗ P o i n t l o c a l (02) \color{Green} \tag{02} Point^{gravity}_{}=\mathbf {GravityAlignmeng}^{gravity}_{local}*Point^{local}_{} Pointgravity=GravityAlignmenglocalgravity∗Pointlocal(02) 这里就把原本相对于 local 坐标系下的数据集,变换到重力坐标系 gravity 下面了。随后还对点云进行了 Z 轴上的过滤。
三、点云数据匹配与滤波
1、初次滤波
经过时间同步,畸变与重力对齐过后的数据,首先会进行第一次体素滤波,核心代码如下:
//src/cartographer/cartographer/mapping/internal/2d/local_trajectory_builder_2d.cc
LocalTrajectoryBuilder2D::AddRangeData(const std::string& sensor_id, const sensor::TimedPointCloudData& unsynchronized_data)
sensor::RangeData LocalTrajectoryBuilder2D::TransformToGravityAlignedFrameAndFilter(consttransform::Rigid3f& transform_to_gravity_aligned_frame,const sensor::RangeData& range_data)
// Step: 6 对点云进行体素滤波
return sensor::RangeData{
cropped.origin,
sensor::VoxelFilter(cropped.returns, options_.voxel_filter_size()), // param: voxel_filter_size
sensor::VoxelFilter(cropped.misses, options_.voxel_filter_size())};
其上的 sensor::VoxelFilter 函数就包含了体素滤波的主要代码,前面已经很详细的说过了,这里就不再重复了。
2、自适应滤波
在完成初次滤波之后,表示 LocalTrajectoryBuilder2D::TransformToGravityAlignedFrameAndFilter() 函数也完成了,那么就会返回到如下函数:
//src/cartographer/cartographer/mapping/internal/2d/local_trajectory_builder_2d.cc
LocalTrajectoryBuilder2D::AddRangeData(const std::string& sensor_id, const sensor::TimedPointCloudData& unsynchronized_data)
return AddAccumulatedRangeData(
time,
// 对点云进行重力对齐,也就是让点云的Z轴与重力方向平行
TransformToGravityAlignedFrameAndFilter(
gravity_alignment.cast<float>() * range_data_poses.back().inverse(),
accumulated_range_data_),
gravity_alignment, sensor_duration);
下一步就是执行 AddAccumulatedRangeData() 函数,该函数依旧位于 local_trajectory_builder_2d.cc 文件中。该函数主要核心是进行点云匹配,详细的细节后面再进行讲解。其会调用到如下代码:
// Step: 7 对 returns点云 进行自适应体素滤波,返回的点云的数据类型是PointCloud
const sensor::PointCloud& filtered_gravity_aligned_point_cloud =
sensor::AdaptiveVoxelFilter(gravity_aligned_range_data.returns,
options_.adaptive_voxel_filter_options());
if (filtered_gravity_aligned_point_cloud.empty()) {
return nullptr;
}
该部分的代码也已经进行过详细讲解了,不太记得的朋友可以回去看看一下前面的博客。
四、点云匹配结果保存
LocalTrajectoryBuilder2D::AddAccumulatedRangeData()
该函数执行完成之后,也就是 LocalTrajectoryBuilder2D::AddRangeData() 函数也执行完了,那么回到调用该函数的如下代码:
//src/cartographer/cartographer/mapping/internal/global_trajectory_builder.cc
GlobalTrajectoryBuilder::AddSensorData(const std::string& sensor_id, sensor::TimedPointCloudData& timed_point_cloud_data) override
中的如下代码:
// 通过前端进行扫描匹配, 然后返回匹配后的结果
std::unique_ptr<typename LocalTrajectoryBuilder::MatchingResult>
matching_result = local_trajectory_builder_->AddRangeData(sensor_id, timed_point_cloud_data);
可知其返回的是一个 LocalTrajectoryBuilder::MatchingResult 类型数据,该数据定于 src/cartographer/cartographer/mapping/internal/2d/local_trajectory_builder_2d.h 文件中,内容如下:
// 扫描匹配的result
struct MatchingResult {
common::Time time; //多雷达数据时间同步之后的数据时间
transform::Rigid3d local_pose; //通过扫描匹配获得 local 坐标系下机器人位姿
sensor::RangeData range_data_in_local; // 经过扫描匹配之后位姿校准之后的雷达数据
// 'nullptr' if dropped by the motion filter.
std::unique_ptr<const InsertionResult> insertion_result;
};
该结果最终被回调函数 local_slam_result_callback_ 使用,回到 一、前言 中的 (1),可以知道该回调函数的源头,并且其最终调用的的是 OnLocalSlamResult() 函数,该函数 实现于 src/cartographer_ros/cartographer_ros/cartographer_ros/map_builder_bridge.cc 文件中,主要功能是把结果数据保存于 MapBuilderBridge::local_slam_data_ 变量中,变量定义如下:
std::unordered_map<int,
std::shared_ptr<const LocalTrajectoryData::LocalSlamData>>
local_slam_data_ GUARDED_BY(mutex_);
五、点云匹配结果发布
存储于 local_slam_data_ 中的数据,在如下函数中被使用:
//src/cartographer_ros/cartographer_ros/cartographer_ros/map_builder_bridge.cc
MapBuilderBridge::GetLocalTrajectoryData() {
// 读取local_slam_data_要上锁
local_slam_data = local_slam_data_.at(trajectory_id);
// 填充LocalTrajectoryData
local_trajectory_data[trajectory_id] = { local_slam_data,map_builder_->pose_graph()->GetLocalToGlobalTransform(trajectory_id),sensor_bridge.tf_bridge().LookupToTracking(local_slam_data->time,trajectory_options_[trajectory_id].published_frame),trajectory_options_[trajectory_id]};
return local_trajectory_data;
}
那么 MapBuilderBridge::GetLocalTrajectoryData() 这个函数又是在哪里被使用的呢?在 src/cartographer_ros/cartographer_ros/cartographer_ros/node.cc 文件中,可以看到如下代码:
void Node::PublishLocalTrajectoryData(const ::ros::TimerEvent& timer_event) {absl::MutexLock lock(&mutex_);
const auto& entry : map_builder_bridge_.GetLocalTrajectoryData()
// 获取对应轨迹id的trajectory_data
const auto& trajectory_data = entry.second;
// 获取local_slam_data的点云数据, 填入到point_cloud中
for (const cartographer::sensor::RangefinderPoint point :
trajectory_data.local_slam_data->range_data_in_local.returns) {
// 这里的虽然使用的是带时间戳的点云结构, 但是数据点的时间全是0.f
point_cloud.push_back(cartographer::sensor::ToTimedRangefinderPoint(point, 0.f /* time */));
}
// 先将点云转换成ROS的格式,再发布scan_matched_point_cloud点云
scan_matched_point_cloud_publisher_.publish(ToPointCloud2Message(
carto::common::ToUniversal(trajectory_data.local_slam_data->time),
node_options_.map_frame,
// 将local坐标系下的点云转换成地图坐标系下的点云
carto::sensor::TransformTimedPointCloud(
point_cloud, trajectory_data.local_to_map.cast<float>())));
也就是最终调用了 scan_matched_point_cloud_publisher_.publish() 函数,把点云数据发布了出去,注意如下部分的代码:
// 将local坐标系下的点云转换成地图坐标系下的点云carto::sensor::TransformTimedPointCloud(
point_cloud, trajectory_data.local_to_map.cast<float>())));
也就是说,最终发布出去的点云数据,是基于 map 坐标系的。具体的细节,后面还会进行详细的讲解,大家不要着急。
六、结语
到目前为止,针对于 LocalTrajectoryBuilder2D 关于点云数据处理部分可以说时完成了,但是该类太过于庞大了,还有很多东西没有进行讲解。不过没有关系,后续过程中会对其完成所有的讲解。既然关于 LocalTrajectoryBuilder2D 对点云的处理已经讲解完成了,那么下面就来看看 LocalTrajectoryBuilder3D。了解 2D 处理过程之后,再了解 3D 就没有难度了。