RRT_star MATLAB
-
colormap 函数 创建栅格地图
clc
clear
close all
%% 构建颜色MAP图
cmap = [1 1 1; ... % 1-白色-空地
0 0 0; ... % 2-黑色-静态障碍
1 0 0; ... % 3-红色-动态障碍
1 1 0;... % 4-黄色-起始点
1 0 1;... % 5-品红-目标点
0 1 0; ... % 6-绿色-到目标点的规划路径
0 1 1]; % 7-青色-动态规划的路径
% 构建颜色MAP图
colormap(cmap);
%% 构建栅格地图场景
% 栅格界面大小:行数和列数
rows = 10;
cols = 10;
% 定义栅格地图全域,并初始化空白区域
field = ones(rows, cols);
% 障碍物区域
obsRate = 0.3;
obsNum = floor(rows*cols*obsRate);
obsIndex = randi([1,rows*cols],obsNum,1);
field(obsIndex) = 2;
% 起始点和目标点
startPos = 2;
goalPos = rows*cols-2;
field(startPos) = 4;
field(goalPos) = 5;
%% 画栅格图
image(1.5,1.5,field);
grid on;
set(gca,'gridline','-','gridcolor','k','linewidth',2,'GridAlpha',0.5);
set(gca,'xtick',1:cols+1,'ytick',1:rows+1);
axis image;
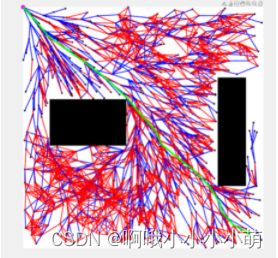
RRT* (渐进最优)
算法原理
与RRT类似,通过采样来确定路径。优点:在每次步骤中会比较找出路径中最短的一条,通过不断优化迭代,找出路径最短的路线。核心为对生成的树重新剪枝得到最优的。
-
参数初始化
clear all; close all; clc; %% 参数初始化 x_I = 1; y_I = 1; % 设置初始点 x_G = 750; y_G = 750; % 设置目标点 GoalThreshold = 30; % 设置目标点阈值 Delta = 30; % 设置扩展步长 default:30 RadiusForNeib = 80; % rewire的范围,半径r MaxIterations = 1200; % 最大迭代次数 UpdateTime = 50; % 更新路径的时间间隔 DelayTime = 0.0; % 绘图延迟时间 %% 建树初始化:T是树,v是节点 结构体实现 T.v(1).x = x_I; % 把起始节点加入到T中 T.v(1).y = y_I; T.v(1).xPrev = x_I; % 节点的父节点坐标:起点的父节点是其本身 T.v(1).yPrev = y_I; T.v(1).totalCost = 0; % 从起始节点开始的累计cost,这里取欧氏距离 T.v(1).indPrev = 0; % 父节点的索引 %% 开始构建树 figure(1); ImpRgb = imread('map.png'); Imp = rgb2gray(ImpRgb); imshow(Imp) xL = size(Imp,1); % 地图x轴长度 yL = size(Imp,2); % 地图y轴长度 hold on plot(x_I, y_I, 'mo', 'MarkerSize',10, 'MarkerFaceColor','m'); % 绘制起点和目标点 plot(x_G, y_G, 'go', 'MarkerSize',10, 'MarkerFaceColor','g'); count = 1; pHandleList = []; lHandleList = []; resHandleList = []; findPath = 0; update_count = 0; path.pos = []; % 最终回溯路径 -
环境中随机采样状态点,Xrand
%Step 1: 在地图中随机采样一个点x_rand (Sample)
x_rand = [unifrnd(0,xL),unifrnd(0,yL)]; %产生随机点(x,y)
- 遍历树,找到最近的节点, xnear, 第一次遍历,最近节点为初始点
%Step 2: 遍历树,从树中找到最近邻近点x_near (Near)
minDis = sqrt((x_rand(1) - T.v(1).x)^2 + (x_rand(2) - T.v(1).y)^2);
minIndex = 1;
for i = 2:size(T.v,2) % T.v按行向量存储,size(T.v,2)获得节点总数
distance = sqrt((x_rand(1) - T.v(i).x)^2 + (x_rand(2) - T.v(i).y)^2); %两节点间距离
if(distance < minDis) %% 找到最短距离
minDis = distance;
minIndex = i; %% index 赋值
end
end
x_near(1) = T.v(minIndex).x; % 找到当前树中离x_rand最近的节点
x_near(2) = T.v(minIndex).y;
temp_parent = minIndex; % 临时父节点的索引
temp_cost = Delta + T.v(minIndex).totalCost; % 临时累计代价
- 开始树的生长过程 xnew. 连接xnear和xrand,方向即为生长方向。根据步长生成形成新的节点,xnew. 同时检测节点是否在障碍物内。(到这里就完成了RRT,只要不断重复采样直到生成到达目标点的路径即可。但路径并不优化,而且对于narrow 很难找到)
%Step 3: 扩展得到x_new节点 (Steer)
theta = atan2((x_rand(2) - x_near(2)),(x_rand(1) - x_near(1)));
x_new(1) = x_near(1) + cos(theta) * Delta;
x_new(2) = x_near(2) + sin(theta) * Delta;
%plot(x_rand(1), x_rand(2), 'ro', 'MarkerSize',10, 'MarkerFaceColor','r');
%plot(x_new(1), x_new(2), 'bo', 'MarkerSize',10, 'MarkerFaceColor','b');
% 检查节点是否是collision-free 点估计
if ~collisionChecking(x_near,x_new,Imp)
continue; %有障碍物
end
- 以生成的xnew为圆心,在半径内重新搜索节点是否有到达此处更近的路径
%Step 4: 在以x_new为圆心,半径为R的圆内搜索节点 (NearC)
disToNewList = []; % 距离 每次循环要把队列清空 xnew改变
nearIndexList = []; % index
for index_near = 1:count %% count是实际的节点多少 每插入一个 count+1
disTonew = sqrt((x_new(1) - T.v(index_near).x)^2 + (x_new(2) - T.v(index_near).y)^2);
if(disTonew < RadiusForNeib) % 满足条件:欧氏距离小于R
disToNewList = [disToNewList disTonew]; % 满足条件的所有节点到x_new的cost
nearIndexList = [nearIndexList index_near]; % 满足条件的所有节点基于树T的索引
end
end
- 搜索完成后,重新选择xnew的父节点,是否有更近的路径使得xnew的累计cost更小
%Step 5: 选择x_new的父节点,使x_new的累计cost最小 (ChooseParent)
for cost_index = 1:length(nearIndexList) % 在上个step中寻找到的节点 cost_index是基于disToNewList的索引,不是整棵树的索引
costToNew = disToNewList(cost_index) + T.v(nearIndexList(cost_index)).totalCost;
if(costToNew < temp_cost) % temp_cost为通过minDist节点的路径的cost
x_mincost(1) = T.v(nearIndexList(cost_index)).x; % 符合剪枝条件节点的坐标
x_mincost(2) = T.v(nearIndexList(cost_index)).y;
if ~collisionChecking(x_mincost,x_new,Imp)
continue; %有障碍物
end
temp_cost = costToNew; % 重新赋值 cost min
temp_parent = nearIndexList(cost_index); %% xnew新的父节点 index
end
end
- 新的父节点已经生成,现在需要将xnew插入到树中
%Step 6: 将x_new插入树T (AddNodeEdge)
count = count+1; %最新节点的索引
T.v(count).x = x_new(1);
T.v(count).y = x_new(2);
T.v(count).xPrev = T.v(temp_parent).x;
T.v(count).yPrev = T.v(temp_parent).y;
T.v(count).totalCost = temp_cost; % 到达当前点的 cost
T.v(count).indPrev = temp_parent; %其父节点x_near的index
l_handle = plot([T.v(count).xPrev, x_new(1)], [T.v(count).yPrev, x_new(2)], 'b', 'Linewidth', 2); %% 线句柄
p_handle = plot(x_new(1), x_new(2), 'ko', 'MarkerSize', 4, 'MarkerFaceColor','k'); %% 点句柄
pHandleList = [pHandleList p_handle]; %绘图的句柄索引即为count
lHandleList = [lHandleList l_handle];
pause(DelayTime);
- 最核心的部分,把多余的节点 进行剪枝
%Step 7: 剪枝 (rewire) 核心 %% 不是最小cost的节点
for rewire_index = 1:length(nearIndexList) %% 半径内剪枝
if(nearIndexList(rewire_index) ~= temp_parent) % 若不是之前计算的最小cost的节点
newCost = temp_cost + disToNewList(rewire_index); % 计算neib经过x_new再到起点的代价
if(newCost < T.v(nearIndexList(rewire_index)).totalCost) % 计算neib经过x_new再到起点的代价小于该点回到起点 需要剪枝
x_neib(1) = T.v(nearIndexList(rewire_index)).x; % 符合剪枝条件节点的坐标
x_neib(2) = T.v(nearIndexList(rewire_index)).y;
if ~collisionChecking(x_neib,x_new,Imp)
continue; %有障碍物
end
T.v(nearIndexList(rewire_index)).xPrev = x_new(1); % 父节点改变为 xnew 对该neighbor信息进行更新
T.v(nearIndexList(rewire_index)).yPrev = x_new(2);
T.v(nearIndexList(rewire_index)).totalCost = newCost;
T.v(nearIndexList(rewire_index)).indPrev = count; % x_new的索引
%delete(pHandleList());
%delete(lHandleList(nearIndexList(rewire_index)));
lHandleList(nearIndexList(rewire_index)) = plot([T.v(nearIndexList(rewire_index)).x, x_new(1)], [T.v(nearIndexList(rewire_index)).y, x_new(2)], 'r', 'Linewidth', 2);
%pHandleList = [pHandleList p_handle]; %绘图的句柄索引即为count
%lHandleList = [lHandleList l_handle];
end
end
end
- 终点检测
%Step 8:检查是否到达目标点附近
disToGoal = sqrt((x_new(1) - x_G)^2 + (x_new(2) - y_G)^2);
if(disToGoal < GoalThreshold && ~findPath) % 找到目标点,此条件只进入一次
findPath = 1;
count = count+1; %手动将Goal加入到树中
Goal_index = count;
T.v(count).x = x_G;
T.v(count).y = y_G;
T.v(count).xPrev = x_new(1);
T.v(count).yPrev = x_new(2);
T.v(count).totalCost = T.v(count - 1).totalCost + disToGoal;
T.v(count).indPrev = count - 1; %其父节点x_near的index
end
- 沿着终点回溯到起点
if(findPath == 1)
update_count = update_count + 1;
if(update_count == UpdateTime) %% 更新路径的间隔
update_count = 0;
j = 2;
path.pos(1).x = x_G;
path.pos(1).y = y_G;
pathIndex = T.v(Goal_index).indPrev;
while 1
path.pos(j).x = T.v(pathIndex).x; % 回溯
path.pos(j).y = T.v(pathIndex).y;
pathIndex = T.v(pathIndex).indPrev; % 沿终点回溯到起点
if pathIndex == 0
break
end
j=j+1;
end
for delete_index = 1:length(resHandleList)
delete(resHandleList(delete_index));
end
for j = 2:length(path.pos)
res_handle = plot([path.pos(j).x; path.pos(j-1).x;], [path.pos(j).y; path.pos(j-1).y], 'g', 'Linewidth', 4);
resHandleList = [resHandleList res_handle];
end
end
end
pause(DelayTime); %暂停DelayTime s,使得RRT*扩展过程容易观察
- 碰撞检测 确保生成的点 和 生成的路径不在障碍物内
%% 每次迭代一个小步长来判断是否碰撞
function feasible=collisionChecking(startPose,goalPose,map)
feasible=true;
%dir=atan2(goalPose(1)-startPose(1),goalPose(2)-startPose(2));
dir = atan2(goalPose(2)-startPose(2),goalPose(1)-startPose(1));
for r = 0:0.5:sqrt(sum((startPose-goalPose).^2)) %以0.5为步长,从startPose开始递增的检查是否有障碍
%posCheck = startPose + r.*[sin(dir) cos(dir)]; %直线距离增加0.5后的坐标
posCheck = startPose + r.*[cos(dir) sin(dir)]; %直线距离增加0.5后的坐标
%将一个小数(x,y)向4个方向取整,确保该点没有触碰障碍
if ~(feasiblePoint(ceil(posCheck),map) && feasiblePoint(floor(posCheck),map) ...
&& feasiblePoint([ceil(posCheck(1)) floor(posCheck(2))],map) ...
&& feasiblePoint([floor(posCheck(1)) ceil(posCheck(2))],map))
feasible = false;
break;
end
if ~feasiblePoint([floor(goalPose(1)),ceil(goalPose(2))],map)
feasible = false;
end
end
function feasible = feasiblePoint(point,map)
feasible = true;
if ~(point(1)>=1 && point(1)<=size(map,1) && point(2)>=1 ...
&& point(2)<=size(map,2) && map(point(2),point(1))==255) %% 225 是否是白的
feasible = false; %有障碍
end
- 针对采样方法也可以做出调整,比如在一定区域内采样而不是直接在整个地图内进行均匀采样