ONNX再探
【GiantPandaCV导语】这篇文章从多个角度探索了ONNX,从ONNX的导出到ONNX和Caffe的对比,以及使用ONNX遭遇的困难以及一些解决办法,另外还介绍了ONNXRuntime以及如何基于ONNXRuntime来调试ONNX模型等,后续也会继续结合ONNX做一些探索性工作。
0x0. 前言
接着上篇文章,继续探索ONNX。这一节我将主要从盘点ONNX模型部署有哪些常见问题,以及针对这些问题提出一些解决方法,另外本文也会简单介绍一个可以快速用于ONNX模型推理验证的框架ONNXRuntime。如果你想用ONNX作为模型转换和部署的工具,可以耐心看下去。今天要讲到的ONNX模型部署碰到的问题大多来自于一些关于ONNX模型部署的文章以及自己使用ONNX进行模型部署过程中的一些经历,有一定的实践意义。
0x1. 导出ONNX
这里以Pytorch为例,来介绍一下要把Pytorch模型导出为ONNX模型需要注意的一些点。首先,Pytorch导出ONNX的代码一般是这样:
import torch
device = torch.device("cuda" if torch.cuda.is_available() else "cpu")
model = torch.load("test.pth") # pytorch模型加载
batch_size = 1 #批处理大小
input_shape = (3, 244, 224) #输入数据,改成自己的输入shape
# #set the model to inference mode
model.eval()
x = torch.randn(batch_size, *input_shape) # 生成张量
x = x.to(device)
export_onnx_file = "test.onnx" # 目的ONNX文件名
torch.onnx.export(model
x,
export_onnx_file,
opset_version=10,
do_constant_folding=True, # 是否执行常量折叠优化
input_names=["input"], # 输入名
output_names=["output"], # 输出名
dynamic_axes={"input":{0:"batch_size"}, # 批处理变量
"output":{0:"batch_size"}})
可以看到Pytorch提供了一个ONNX模型导出的专用接口,只需要配置好相关的模型和参数就可以完成自动导出ONNX模型的操作了。代码相关细节请自行查看,这里来列举几个导出ONNX模型中应该注意的问题。
- 自定义OP问题
以2020年的YOLOV5为例,在模型的BackBone部分自定义了一个Focus OP,这个OP的代码实现为:
class Focus(nn.Module):
# Focus wh information into c-space
def __init__(self, c1, c2, k=1, s=1, p=None, g=1, act=True): # ch_in, ch_out, kernel, stride, padding, groups
super(Focus, self).__init__()
self.conv = Conv(c1 * 4, c2, k, s, p, g, act)
# self.contract = Contract(gain=2)
def forward(self, x): # x(b,c,w,h) -> y(b,4c,w/2,h/2)
return self.conv(torch.cat([x[..., ::2, ::2], x[..., 1::2, ::2], x[..., ::2, 1::2], x[..., 1::2, 1::2]], 1))
# return self.conv(self.contract(x))
这个操作就是一个stride slice然后再concat的操作,类似于PixelShuffle的逆向过程。下面是把YOLOv5模型导出ONNX模型之后Focus层的可视化结果。
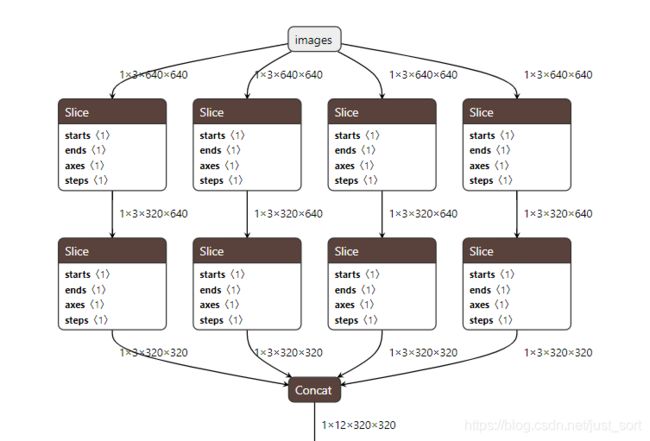
可以看到这个OP在使用Pytorch导出ONNX的过程中被拆成了很多更小的操作,这个时候Focus OP的问题就是推理的效率可能比较低并且拆成的小OP各个推理框架的支持程度不一致。要解决这种问题,要么直接在前向推理框架实现一个自定义的Focus OP,ncnn在实现yolov5的时候也是这样做的:https://github.com/Tencent/ncnn/blob/master/examples/yolov5.cpp#L24。要么将这个OP使用其它的操作来近似代替,比如这里可以使用一个stride为2的卷积OP来代替Focus结构,注意代替之后有可能准确率会下降,需要做精度和部署友好性的平衡。
综上,自定义的OP在导出ONNX进行部署时,除了考虑ONNX模型的执行效率问题,还要考虑框架是否支持的问题。如果想快速迭代产品,建议尽量以一些经典结构为基础,尽量少引入自定义OP。
- 后处理问题
如果我们要导出检测网络的ONNX模型进行部署,就会碰到这个问题,后处理部分是否需要导入到ONNX模型?
我们知道在使用Pytorch导出ONNX模型时,所有的Aten操作都会被ONNX记录下来(具体记录什么内容请参考文章开头链接推文的介绍),成为一个DAG。然后ONNX会根据这个DAG的输出节点来反推这个DAG中有哪些节点是有用的,这样获得的就是最终的ONNX模型。而后处理,比如非极大值抑制也是通过Aten操作拼起来的,所谓Aten操作就是Pytorch中的基础算术单元比如加减乘除,所有的OP以及和Tensor相关的操作都基于Aten中的操作拼。
检测网络比如YOLOV3的后处理就是NMS,代码示例如https://github.com/ultralytics/yolov3/blob/master/utils/general.py#L325。当我们完成检测网络的训练之后直接导出ONNX模型我们就会发现NMS这个实现也全部被导入了ONNX,如下图所示:
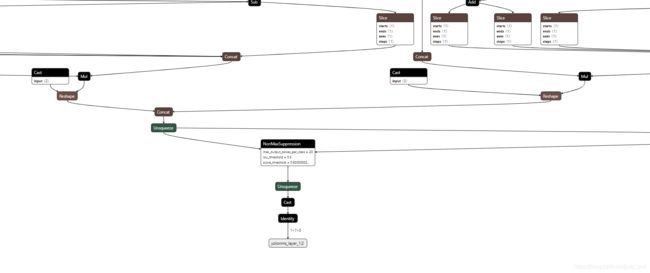
这个结构非常复杂,我们要在实际业务中去部署这个模型难度是很大的。另外,刚才我们提到ONNX模型只能记录Pytorch中的Aten操作,对其它的一些逻辑运算符比如if是无能为力的(意思是不能记录if的多个子图),而后处理过程中根据置信度阈值来筛选目标框是常规操作。如果我们在导出ONNX模型时是随机输入或者没有指定目标的图片就会导致这个ONNX记录下来的DAG可能有缺失。最后,每个人实现后处理的方式可能都是不一样的,这也增加了ONNX模型部署的难度。为了部署的友好性和降低转换过程中的风险,后处理过程最好由读者自己完成,我们只需要导出模型的Backbone和Neck部分为ONNX。
具体来说,我们只需要在Pytorch的代码实现中屏蔽掉后处理部分然后导出ONNX模型即可。这也是目前使用ONNX部署检测模型的通用方案。
所以,针对后处理问题,我们的结论就是在使用ONNX进行部署时直接屏蔽后处理,将后处理单独拿出来处理。
- 胶水OP问题。
在导出ONNX模型的过程中,经常会带来一些胶水OP,比如Gather, Shape等等。例如上节推文中介绍到当执行下面的Pytorch导出ONNX程序时,就会引入很多胶水OP。
import torch
class JustReshape(torch.nn.Module):
def __init__(self):
super(JustReshape, self).__init__()
def forward(self, x):
return x.view((x.shape[0], x.shape[1], x.shape[3], x.shape[2]))
net = JustReshape()
model_name = '../model/just_reshape.onnx'
dummy_input = torch.randn(2, 3, 4, 5)
torch.onnx.export(net, dummy_input, model_name, input_names=['input'], output_names=['output'])
导出的ONNX模型可视化如下:
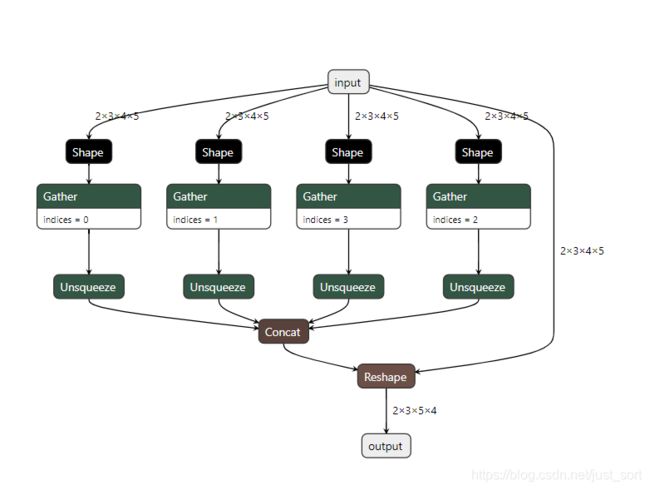
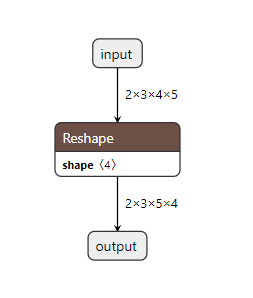
这个时候的做法一般就是过一遍onnx-simplifer,可以去除这些胶水OP获得一个简化后的模型。
综上,我们在导出ONNX模型的一般流程就是,去掉后处理,尽量不引入自定义OP,然后导出ONNX模型,并过一遍大老师的https://github.com/daquexian/onnx-simplifier,这样就可以获得一个精简的易于部署的ONNX模型。从ONNX官方仓库提供的模型来看,似乎微软真的想用ONNX来统一所有框架的所有操作。但理想很丰满,现实很骨干,各种训练框架的数据排布,OP实现不一致,人为后处理不一致,各种推理框架支持度不一致,推理芯片SDK的OP支持度不一致都让这个ONNX(万能格式)遭遇了困难,所以在基于ONNX做一些部署业务的时候,也要有清晰的判断并选取风险最小的方法。
0x2. ONNX or Caffe?
这个问题其实源于之前做模型转换和基于TensorRT部署一些模型时候的思考。我们还是以Pytorch为例,要把Pytorch模型通过TensorRT部署到GPU上,一般就是Pytorch->Caffe->TensorRT以及Pytorch->ONNX->TensorRT(当然Pytorch也是支持直接转换到TensorRT,这里不关心)。那么这里就有一个问题,我们选择哪一条路比较好?
其实,我想说的应该是Caffe是过去,而ONNX是将来。为什么要这样说?
首先很多国产推理芯片比如海思NNIE,高通SNPE它们首先支持的都是Caffe这种模型格式,这可能是因为年代的原因,也有可能是因为这些推理SDK实现的时候OP都非常粗粒度。比如它对卷积做定制的优化,有NC4HW4,有Im2Col+gemm,有Winograd等等非常多方法,后面还考虑到量化,半精度等等,然后通过给它喂Caffe模型它就知道要对这个网络里面对应的卷积层进行硬件加速了。所以这些芯片支持的网络是有限的,比如我们要在Hisi35xx中部署一个含有upsample层的Pytorch模型是比较麻烦的,可能不太聪明的工程说我们要把这个模型回退给训练人员改成支持的上采样方式进行训练,而聪明的工程师可能说直接把upsample的参数填到反卷积层的参数就可以了。无论是哪种方式都是比较麻烦的,所以Caffe的缺点就是灵活度太差。其实基于Caffe进行部署的方式仍然在工业界发力,ONNX是趋势,但是ONNX现在还没有完全取代Caffe。
接下来,我们要再提一下上面那个if的事情了,假设现在有一个新的SOTA模型被提出,这个模型有一个自定义的OP,作者是用Pytorch的Aten操作拼的,逻辑大概是这样:
result = check()
if result == 0:
result = algorithm1(result)
else:
result = algorithm2(result)
return result
然后考虑将这个模型导出ONNX或者转换为Caffe,如果是Caffe的话我们需要去实现这个自定义的OP,并将其注册到Caffe的OP管理文件中,虽然这里比较繁琐,但是我们可以将if操作隐藏在这个大的OP内部,这个if操作可以保留下来。而如果我们通过导出ONNX模型的方式if子图只能保留一部分,要么保留algorithm1,要么保留algorithm2对应的子图,这种情况ONNX似乎就没办法处理了。这个时候要么保存两个ONNX模型,要么修改算法逻辑绕过这个问题。从这里引申一下,如果我们碰到有递归关系的网络,基于ONNX应当怎么部署?ONNX还有一个缺点就是OP的细粒度太细,执行效率低,不过ONNX已经推出了多种化方法可以将OP的细粒度变粗,提高模型执行效率。目前在众多经典算法上,ONNX已经支持得非常好了。
最后,越来越多的厂商推出的端侧推理芯片开始支持ONNX,比如地平线的BPU,华为的Ascend310相关的工具链都开始接入ONNX,所以个人认为ONNX是推理框架模型转换的未来,不过仍需时间考验,毕竟谁也不希望因为框架OP对齐的原因导出一个超级复杂的ONNX模型,还是简化不了的那种,导致部署难度很大。
0x3. 一些典型坑点及解决办法
第一节已经提到,将我们的ONNX模型过一遍onnx-simplifer之后就可以去掉胶水OP并将一些细粒度的OP进行op fuse成粗粒度的OP,并解决一部分由于Pytorch和ONNX OP实现方式不一致而导致模型变复杂的问题。除了这些问题,本节再列举一些ONNX模型部署中容易碰到的坑点,并尝试给出一些解决办法。
- 预处理问题。
和后处理对应的还有预处理问题,如果在Pytorch中使用下面的代码导出ONNX模型。
import torch
class JustReshape(torch.nn.Module):
def __init__(self):
super(JustReshape, self).__init__()
self.mean = torch.randn(2, 3, 4, 5)
self.std = torch.randn(2, 3, 4, 5)
def forward(self, x):
x = (x - self.mean) / self.std
return x.view((x.shape[0], x.shape[1], x.shape[3], x.shape[2]))
net = JustReshape()
model_name = '../model/just_reshape.onnx'
dummy_input = torch.randn(2, 3, 4, 5)
torch.onnx.export(net, dummy_input, model_name, input_names=['input'], output_names=['output'])
我们先给这个ONNX模型过一遍onnx-simplifer,然后使用Netron可视化之后模型大概长这样:
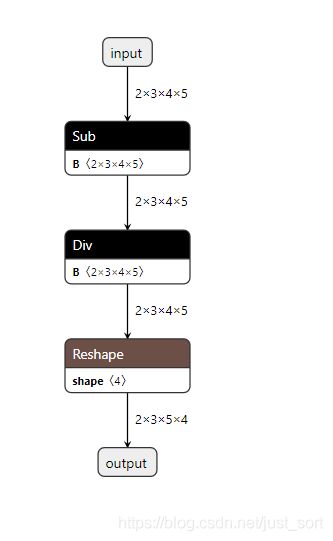
如果我们要把这个模型放到NPU上部署,如果NPU芯片不支持Sub和Div的量化计算,那么这两个操作会被回退到NPU上进行计算,这显然是不合理的,因为我们总是想网络在NPU上能一镜到底,中间断开必定会影响模型效率,所以这里的解决办法就是把预处理放在基于nn.Module搭建模型的代码之外,然后推理的时候先把预处理做掉即可。
- 框架OP实现不一致问题
当从Mxnet转换模型到ONNX时,如果模型是带有PReLU OP的(在人脸识别网络很常见),就是一个大坑了。主要有两个问题,当从mxnet转为ONNX时,PReLU的slope参数维度可能会导致onnxruntime推理时失败,报错大概长这样:
2)[ONNXRuntimeError] : 6 : RUNTIME_EXCEPTION : Non-zero status code returned while running PRelu node. Name:'conv_1_relu'...... Attempting to broadcast an axis by a dimension other than 1. 56 by 64
这个错误产生的原因可能是MxNet的版本问题(https://github.com/apache/incubator-mxnet/issues/17821),这个时候的解决办法就是:修改PRelu层的slope参数的shape,不仅包括type参数,对应的slope值也要修改来和shape对应。
核心代码如下:
graph.input.remove(input_map[input_name])
new_nv = helper.make_tensor_value_info(input_name, TensorProto.FLOAT, [input_dim_val,1,1])
graph.input.extend([new_nv])
想了解更加详细的信息可以参考问后的资料2和资料3。
这个问题其实算是个小问题,我们自己在ONNX模型上fix一下即可。下一个问题就是如果我们将处理好之后的ONNX通过TensorRT进行部署的话,我们会发现TensorRT不支持PReLU这个OP,这个时候解决办法要么是TensorRT自定义PReLU插件,但是这种方法会打破TensorRT中conv+bn+relu的op fusion,速度会变慢,并且如果要做量化部署似乎是不可行的。所以这个时候一般会采用另外一种解决办法,使用relu和scale op来组合成PReLU,如下图所示:
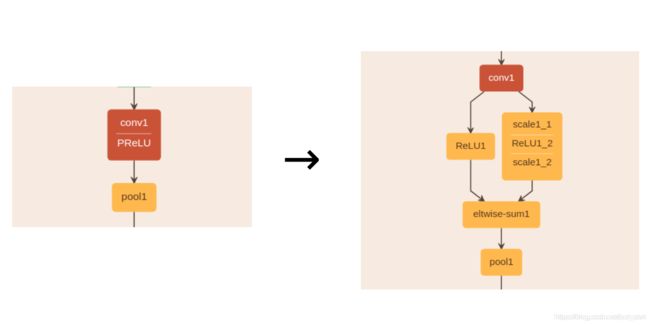
所以,我们在onnx模型中只需要按照这种方法将PReLU节点进行等价替换就可以了。
这个地方以PReLU列举了一个框架OP实现不一致的问题,比如大老师最新文章也介绍的就是squeeze OP在Pytorch和ONNX实现时的不一致导致ONNX模型变得很复杂,这种问题感觉是基于ONNX支持模型部署时的常见问题,虽然onnx-simplifier已经解决了一些问题,但也不能够完全解决。
- 其它问题
当我们使用tf2onnx工具将TensorFlow模型转为ONNX模型时,模型的输入batch维度没有被设置,我们需要自行添加。解决代码如下:
# 为onnx模型增加batch维度
def set_model_input_batch(self, index=0, name=None, batch_size=4):
model_input = None
if name is not None:
for ipt in self.model.graph.input:
if ipt.name == name:
model_input = ipt
else:
model_input = self.model.graph.input[index]
if model_input:
tensor_dim = model_input.type.tensor_type.shape.dim
tensor_dim[0].ClearField("dim_param")
tensor_dim[0].dim_value = batch_size
else:
print('get model input failed, check index or name')
当我们基于ONNX和TensorRT部署风格迁移模型,里面有Instance Norm OP的时候,可能会发现结果不准确,这个问题在这里被提出:https://forums.developer.nvidia.com/t/inference-result-inaccurate-with-conv-and-instancenormalization-under-certain-conditions/111617。经过debug发现这个问题出在这里:https://github.com/onnx/onnx-tensorrt/blob/5dca8737851118f6ab8a33ea1f7bcb7c9f06caf5/builtin_op_importers.cpp#L1557。

问题比较明显了,instancenorm op里面的eps只支持>=1e-4的,所以要么注释掉这个限制条件,要么直接在ONNX模型中修改instancenorm op的eps属性,代码实现如下:
# 给ONNX模型中的目标节点设置指定属性
# 调用方式为:set_node_attribute(in_node, "epsilon", 1e-5)
# 其中in_node就是所有的instancenorm op。
def set_node_attribute(self, target_node, attr_name, attr_value):
flag = False
for attr in target_node.attribute:
if (attr.name == attr_name):
if attr.type == 1:
attr.f = attr_value
elif attr.type == 2:
attr.i = attr_value
elif attr.type == 3:
attr.s = attr_value
elif attr.type == 4:
attr.t = attr_value
elif attr.type == 5:
attr.g = attr_value
# NOTE: For repeated composite types, we should use something like
# del attr.xxx[:]
# attr.xxx.extend([n1, n2, n3])
elif attr.type == 6:
attr.floats[:] = attr_value
elif attr.type == 7:
attr.ints[:] = attr_value
elif attr.type == 8:
attr.strings[:] = attr_value
else:
print("unsupported attribute data type with attribute name")
return False
flag = True
if not flag:
# attribute not in original node
print("Warning: you are appending a new attribute to the node!")
target_node.attribute.append(helper.make_attribute(attr_name, attr_value))
flag = True
return flag
当我们使用了Pytorch里面的[]索引操作或者其它需要判断的情况,ONNX模型会多出一些if OP,这个时候这个if OP的输入已经是一个确定的True,因为我们已经介绍过为False那部分的子图会被丢掉。这个时候建议过一遍最新的onnx-simplifier或者手动删除所有的if OP,代码实现如下:
# 通过op的类型获取onnx模型的计算节点
def get_nodes_by_optype(self, typename):
nodes = []
for node in self.model.graph.node:
if node.op_type == typename:
nodes.append(node)
return nodes
# 移除ONNX模型中的目标节点
def remove_node(self, target_node):
'''
删除只有一个输入和输出的节点
'''
node_input = target_node.input[0]
node_output = target_node.output[0]
# 将后继节点的输入设置为目标节点的前置节点
for node in self.model.graph.node:
for i, n in enumerate(node.input):
if n == node_output:
node.input[i] = node_input
target_names = set(target_node.input) & set([weight.name for weight in self.model.graph.initializer])
self.remove_weights(target_names)
target_names.add(node_output)
self.remove_inputs(target_names)
self.remove_value_infos(target_names)
self.model.graph.node.remove(target_node)
具体顺序就是先获取所有if类型的OP,然后删除这些节点。
0x4. ONNXRuntime介绍及用法
ONNXRuntime是微软推出的一个推理框架,似乎最新版都支持训练功能了,用户可以非常方便的运行ONNX模型。ONNXRuntime支持多种运行后端包括CPU,GPU,TensorRT,DML等。ONNXRuntime是专为ONNX打造的框架,虽然我们大多数人把ONNX只是当成工具人,但微软可不这样想,ONNX统一所有框架的IR表示应该是终极理想吧。从使用者的角度我们简单分析一下ONNXRuntime即可。
import numpy as np
import onnx
import onnxruntime as ort
image = cv2.imread("image.jpg")
image = np.expand_dims(image, axis=0)
onnx_model = onnx.load_model("resnet18.onnx")
sess = ort.InferenceSession(onnx_model.SerializeToString())
sess.set_providers(['CPUExecutionProvider'])
input_name = sess.get_inputs()[0].name
output_name = sess.get_outputs()[0].name
output = sess.run([output_name], {input_name : image_data})
prob = np.squeeze(output[0])
print("predicting label:", np.argmax(prob))
这里展示了一个使用ONNXRuntime推理ResNet18网络模型的例子,可以看到ONNXRuntime在推理一个ONNX模型时大概分为Session构造,模型加载与初始化和运行阶段(和静态图框架类似)。ONNXRuntime框架是使用C++开发,同时使用Wapper技术封装了Python接口易于用户使用。
从使用者的角度来说,知道怎么用就可以了,如果要了解框架内部的知识请移步源码(https://github.com/microsoft/onnxruntime)和参考资料6。
0x5. 调试工具
会逐渐补充一些解决ONNX模型出现的BUG或者修改,调试ONNX模型的代码到这里:https://github.com/BBuf/onnx_learn 。这一节主要介绍几个工具类函数结合ONNXRuntime来调试ONNX模型。
假设我们通过Pytorch导出了一个ONNX模型,在和Pytorch有相同输入的情况下输出结果却不正确。这个时候我们要定位问题肯定需要获取ONNX模型指定OP的特征值进行对比,但是ONNX模型的输出在导出模型的时候已经固定了,这个时候应该怎么做?
首先,我们需要通过名字获取ONNX模型中的计算节点,实现如下:
# 通过名字获取onnx模型中的计算节点
def get_node_by_name(self, name):
for node in self.model.graph.node:
if node.name == name:
return node
然后把这个我们想看的节点扩展到ONNX的输出节点列表里面去,实现如下:
# 将target_node添加到ONNX模型中作为输出节点
def add_extra_output(self, target_node, output_name):
target_output = target_node.output[0]
extra_shape = []
for vi in self.model.graph.value_info:
if vi.name == target_output:
extra_elem_type = vi.type.tensor_type.elem_type
for s in vi.type.tensor_type.shape.dim:
extra_shape.append(s.dim_value)
extra_output = helper.make_tensor_value_info(
output_name,
extra_elem_type,
extra_shape
)
identity_node = helper.make_node('Identity', inputs=[target_output], outputs=[output_name], name=output_name)
self.model.graph.node.append(identity_node)
self.model.graph.output.append(extra_output)
然后修改一下onnxruntime推理程序中的输出节点为我们指定的节点就可以拿到指定节点的推理结果了,和Pytorch对比一下我们就可以知道是哪一层出错了。
这里介绍的是如何查看ONNX在确定输入的情况下如何拿到推理结果,如果我们想要获取ONNX模型中某个节点的信息又可以怎么做呢?这个就结合上一次推文讲的ONNX的结构来看就比较容易了。例如查看某个指定节点的属性代码实现如下:
def show_node_attributes(node):
print("="*10, "attributes of node: ", node.name, "="*10)
for attr in node.attribute:
print(attr.name)
print("="*60)
查看指定节点的输入节点的名字实现如下:
def show_node_inputs(node):
# Generally, the first input is the truely input
# and the rest input is weight initializer
print("="*10, "inputs of node: ", node.name, "="*10)
for input_name in node.input:
print(input_name) # type of input_name is str
print("="*60)
…
0x6. 总结
这篇文章从多个角度探索了ONNX,从ONNX的导出到ONNX和Caffe的对比,以及使用ONNX遭遇的困难以及一些解决办法,另外还介绍了ONNXRuntime以及如何基于ONNXRuntime来调试ONNX模型等,后续会继续结合ONNX做一些探索性工作。
0x7. 参考资料
- 资料1:https://zhuanlan.zhihu.com/p/128974102
- 资料2:https://zhuanlan.zhihu.com/p/165294876
- 资料3:https://zhuanlan.zhihu.com/p/212893519
- 资料4:https://blog.csdn.net/zsf10220208/article/details/107457820
- 资料5:https://github.com/bindog/onnx-surgery
- 资料6:https://zhuanlan.zhihu.com/p/346544539
- 资料7:https://github.com/daquexian/onnx-simplifier
欢迎关注GiantPandaCV, 在这里你将看到独家的深度学习分享,坚持原创,每天分享我们学习到的新鲜知识。( • ̀ω•́ )✧
有对文章相关的问题,或者想要加入交流群,欢迎添加BBuf微信:

为了方便读者获取资料以及我们公众号的作者发布一些Github工程的更新,我们成立了一个QQ群,二维码如下,感兴趣可以加入。
