一.无人车导航:CMU团队开源自主导航和规划算法框架
之前的文章汇总:
多传感器融合SLAM部分:
开源框架测试
一:Tixiao Shan最新力作LVI-SAM(Lio-SAM+Vins-Mono),基于视觉-激光-惯导里程计的SLAM框架,环境搭建和跑通过程_goldqiu的博客-CSDN博客
二.激光SLAM框架学习之A-LOAM框架---介绍及其演示_goldqiu的博客-CSDN博客
八.激光SLAM框架学习之LeGO-LOAM框架---框架介绍和运行演示_goldqiu的博客-CSDN博客
十一.激光惯导LIO-SLAM框架学习之LIO-SAM框架---框架介绍和运行演示_goldqiu的博客-CSDN博客
十二.激光SLAM框架学习之livox-loam框架安装和跑数据集_goldqiu的博客-CSDN博客
二十二.香港大学火星实验室R3LIVE框架跑官方数据集_goldqiu的博客-CSDN博客
二十四-香港大学火星实验室FAST-LIO2框架跑官方数据集_goldqiu的博客-CSDN博客
二十七-VIO-SLAM开源框架Vin-mono跑EuRoC数据集_goldqiu的博客-CSDN博客
实车测试
七.激光SLAM框架学习之A-LOAM框架---速腾Robosense-16线雷达室内建图_goldqiu的博客-CSDN博客
九.激光SLAM框架学习之LeGO-LOAM框架---速腾Robosense-16线雷达室外建图和其他框架对比、录包和保存数据_goldqiu的博客-CSDN博客
十三.激光SLAM框架学习之livox-Mid-70雷达使用和实时室外跑框架_goldqiu的博客-CSDN博客
十六.激光和惯导LIO-SLAM框架学习之配置自用传感器实时室外跑LIO-SAM框架_goldqiu的博客-CSDN博客
十八.多个SLAM框架(A-LOAM、Lego-loam、LIO-SAM、livox-loam)室外测试效果粗略对比分析_goldqiu的博客-CSDN博客
二十六-香港大学火星实验室FAST-LIO2框架跑自录数据集(Mid-70和SBG-Ellipse-N惯导)_goldqiu的博客-CSDN博客
二十九-使用RealSenseD435进行ORBSLAM2实时三维重建_goldqiu的博客-CSDN博客_realsense 三维重建
标定
十四.激光和惯导LIO-SLAM框架学习之惯导内参标定_goldqiu的博客-CSDN博客
十五.激光和惯导LIO-SLAM框架学习之惯导与雷达外参标定(1)_goldqiu的博客-CSDN博客
二十.激光、视觉和惯导LVIO-SLAM框架学习之相机内参标定_goldqiu的博客-CSDN博客
二十一.激光、视觉和惯导LVIO-SLAM框架学习之相机与雷达外参标定(1)_goldqiu的博客-CSDN博客
开源框架学习
三.激光SLAM框架学习之A-LOAM框架---项目工程代码介绍---1.项目文件介绍(除主要源码部分)_goldqiu的博客-CSDN博客
四.激光SLAM框架学习之A-LOAM框架---项目工程代码介绍---2.scanRegistration.cpp--前端雷达处理和特征提取_goldqiu的博客-CSDN博客
五.激光SLAM框架学习之A-LOAM框架---项目工程代码介绍---3.laserOdometry.cpp--前端雷达里程计和位姿粗估计_goldqiu的博客-CSDN博客
六.激光SLAM框架学习之A-LOAM框架---项目工程代码介绍---4.laserMapping.cpp--后端建图和帧位姿精估计(优化)_goldqiu的博客-CSDN博客
十.激光SLAM框架学习之LeGO-LOAM框架---算法原理和改进、项目工程代码_goldqiu的博客-CSDN博客
十七.激光和惯导LIO-SLAM框架学习之IMU和IMU预积分_goldqiu的博客-CSDN博客
十九.激光和惯导LIO-SLAM框架学习之项目工程代码介绍---代码框架和一些文件解释_goldqiu的博客-CSDN博客
二十三.激光和惯导LIO-SLAM框架学习之LIO-SAM项目工程代码介绍---基础知识_goldqiu的博客-CSDN博客
从这篇博客就开始进入到Localization、Navigation部分了
二十五.SLAM中Mapping和Localization区别和思考
Planning
一.路径规划---二维路径规划仿真实现-gmapping+amcl+map_server+move_base_goldqiu的博客-CSDN博客
二.路径规划---二维路径规划实车实现---gmapping+amcl+map_server+move_base_goldqiu的博客-CSDN博客
Global Localization
一.全局定位--开源定位框架LIO-SAM_based_relocalization实录数据集测试_goldqiu的博客-CSDN博客
二.全局定位--开源定位框架livox-relocalization实录数据集测试_goldqiu的博客-CSDN博客_livox数据集
三.全局定位--LIO-SAM在RTK全局约束下建图和定位(1)_goldqiu的博客-CSDN博客
栅格地图:
二十八-三维点云实时和离线生成二维栅格、三维栅格地图_goldqiu的博客-CSDN博客
实验室视频汇总:
自主移动机器人系统集成开发_哔哩哔哩_bilibili
基本介绍
autonomous_exploration_development_environment是CMU团队开源出来的无人车仿真环境,可以自己录制地图,然后部署在仿真环境中,跑自己写的规划和自动导航算法。TARE Planner和DSV Planner是CMU团队开源出来的自主探索算法框架,而FAR Planner 是CMU团队开源出来的规划算法框架。
官方网站:
https://www.cmu-exploration.com/
安装仿真环境
安装依赖和源码
sudo apt update
sudo apt install libusb-dev
git clone https://github.com/HongbiaoZ/autonomous_exploration_development_environment.git
cd autonomous_exploration_development_environment
git checkout distribution
catkin_make安装仿真地图:
./src/vehicle_simulator/mesh/download_environments.shTARE Planner安装
git clone https://github.com/caochao39/tare_planner.git
cd tare_planner
catkin_make先运行仿真环境:
source devel/setup.sh
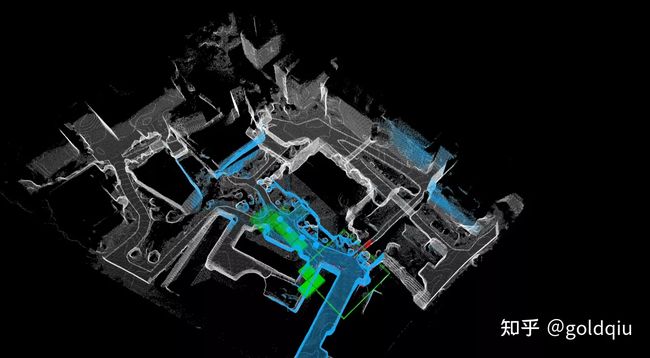
roslaunch vehicle_simulator system_garage.launch运行TARE Planner
source devel/setup.sh
roslaunch tare_planner explore_garage.launch效果:


运行其他仿真地图环境:
roslaunch vehicle_simulator system_campus.launch
roslaunch tare_planner explore_campus.launch 效果:

DSV Planner安装
安装依赖
sudo apt install libgoogle-glog-dev libgflags-dev
sudo apt install ros-melodic-octomap-ros安装源码
git clone https://github.com/HongbiaoZ/dsv_planner.git
cd dsv_planner
git checkout distribution
catkin_make运行:
roslaunch vehicle_simulator system_garage.launch
roslaunch dsvp_launch explore_garage.launch效果和TARE Planner类似
FAR Planner安装
git clone https://github.com/MichaelFYang/far_planner
cd far_planner
catkin_make运行
roslaunch vehicle_simulator system_indoor.launch
roslaunch far_planner far_planner.launch效果

附:无人机仿真环境
https://github.com/caochao39/ae