重装双系统后应该做的事
1、安装chrome
官网有linux版本的https://www.google.cn/chrome/,选择deb文件
2、安装qq
官网有linux版本的https://im.qq.com/linuxqq/download.html,选择deb文件
3、安装ros melodic版本
首先配置ubuntu软件库
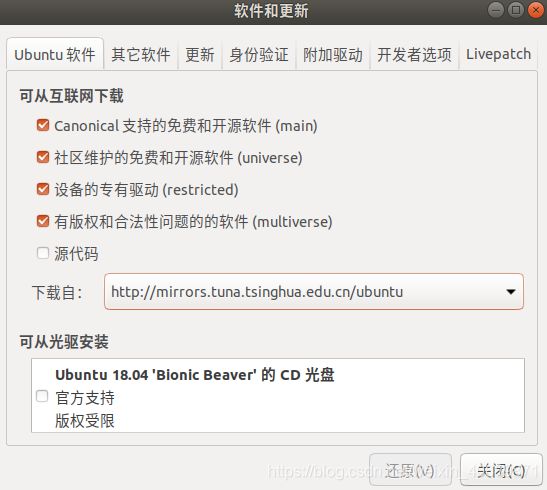
避免后面会出现无法定位软件包的错误,这里ROS提供了国内的安装源,添加国内安装源命令
sudo sh -c '. /etc/lsb-release && echo "deb http://mirrors.ustc.edu.cn/ros/ubuntu/ $DISTRIB_CODENAME main" > /etc/apt/sources.list.d/ros-latest.list'
设置密钥
sudo apt-key adv --keyserver hkp://keyserver.ubuntu.com:80 --recv-key 421C365BD9FF1F717815A3895523BAEEB01FA116
更新软件
sudo apt update
W: GPG 错误:http://mirrors.ustc.edu.cn/ros/ubuntu bionic InRelease: 由于没有公钥,无法验证下列签名: NO_PUBKEY F42ED6FBAB17C654
E: 仓库 “http://mirrors.ustc.edu.cn/ros/ubuntu bionic InRelease” 没有数字签名。
N: 无法安全地用该源进行更新,所以默认禁用该源。
N: 参见 apt-secure(8) 手册以了解仓库创建和用户配置方面的细节。
sudo apt-key adv --keyserver keyserver.ubuntu.com --recv-keys F42ED6FBAB17C654再更新软件
sudo apt update
安装ros melodic
sudo apt-get install ros-melodic-desktop-full
安装rosdep
sudo apt install python-rosdeprosdep初始化
cd /etc
sudo gedit hosts
在打开的文件末尾加入
151.101.84.133 raw.githubusercontent.com
保存退出,再进行rosdep初始化
sudo rosdep init
rosdep 更新
rosdep update
添加ros环境变量
echo "source /opt/ros/melodic/setup.bash" >> ~/.bashrc
source ~/.bashrc安装rosinstall
sudo apt install python-rosinstall python-rosinstall-generator python-wstool build-essential
4、安装anaconda3.6
sudo apt-get updatesudo apt-get upgrade下载Anaconda Python 3.6版,64位的Linux系统应该下载“Anaconda3-5.2.0-Linux-x86_64.sh”
在下载的文件所在文件夹下打开终端
bash Anaconda3-5.2.0-Linux-x86_64.sh5、anaconda安装tensorflow(cpu版)
conda create --name tf_cpu python=3.7 # tf_gpu_env是这个环境的名字启动环境
source activate tf_cpu退出环境
source deactivate tf_cpu6、安装tensorflow低版本的和最新版的方法
sudo apt-get install python-pip pyhton-dev python-virtualenv
virtualenv --system-site-packages ~/tensorflowsource ~/tensorflow/bin/activate
easy_install -U pip
安装最新版的tensorflow
pip install --upgrade tensorflow安装低版本任一版本的tensorflow,比如1.5
pip install --upgrade tensorflow==1.5启动环境
source ~/tensorflow/bin/activate退出环境
deactivate7、安装显卡驱动
一行代码安装
sudo ubuntu-drivers autoinstall重启,终端输入nvidia-smi

8、实时刷新显示GPU使用情况
每隔1秒刷新一次GPU使用情况
watch -n 1 -d nvidia-smi9、实用小巧录屏工具
sudo apt-get install kazam10、实用截图软件
sudo apt install deepin-screenshot
11、CUDA10.0、cuDNN7.5的安装
https://blog.csdn.net/qq_43030766/article/details/91513501

我的驱动版本为450.51.06,这里选择cuda10.0+cudnn7.5
首先安装驱动(见第七说明)
查看驱动方式nvidia-smi
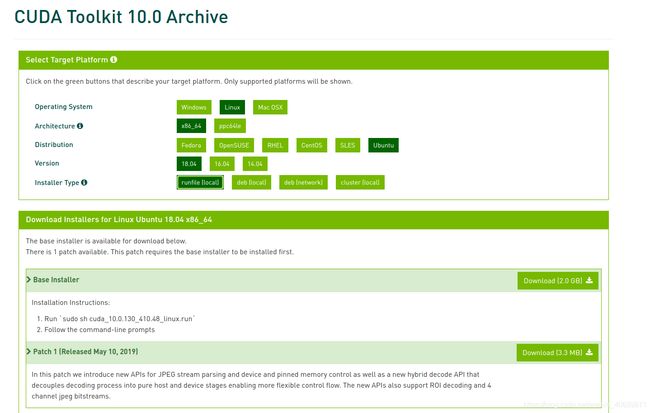
下载cuda10.0
https://developer.nvidia.com/cuda-toolkit-archive
或者天翼网盘下载(用微信登陆)
一共有两个文件
在这两个文件所在文件夹下打开终端,或者cd到这个文件夹,执行安装命令
sudo sh cuda_10.0.130_410.48_linux.run
sudo sh cuda_10.0.130.1_linux.run第一个问是否要装驱动,选择no,其余的都选yes。
配置环境变量,打开.bashrc
在主目录下ctrl+h,打开.bashrc文件,或者gedit ~/.bashrc
export PATH=/usr/local/cuda-10.0/bin${PATH:+:${PATH}}
export LD_LIBRARY_PATH=/usr/local/cuda/lib64${LD_LIBRARY_PATH:+:${LD_LIBRARY_PATH}}
export CUDA_HOME=/usr/local/cuda
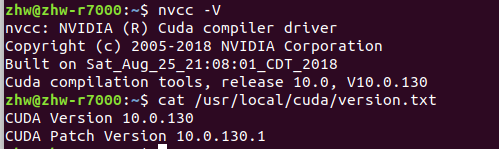
保存后进行source
source ~/.bashrc安装完毕,nvcc --version或者cat /usr/local/cuda/version.txt检查是否安装成功
下载cudnn7.5
https://developer.nvidia.com/rdp/cudnn-archive
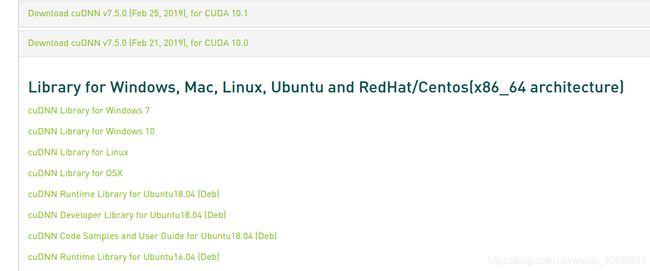
或者天翼网盘下载
一共有三个文件
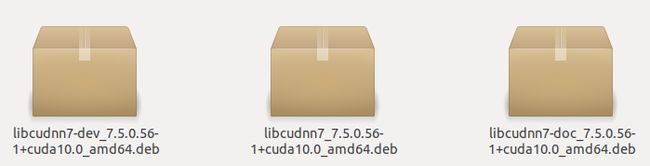
按下面顺序安装
sudo dpkg -i libcudnn7_7.5.0.56-1+cuda10.0_amd64.deb
sudo dpkg -i libcudnn7-dev_7.5.0.56-1+cuda10.0_amd64.deb
sudo dpkg -i libcudnn7-doc_7.5.0.56-1+cuda10.0_amd64.deb
将第二个中的cudnn.h拷贝到/usr/local/cuda/include文件夹中,要sudo才可以复制
sudo cp /usr/include/cudnn.h /usr/local/cuda/include
sudo chmod a+x /usr/local/cuda/include/cudnn.h
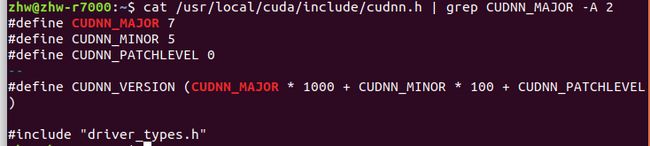
安装完毕,cat /usr/local/cuda/include/cudnn.h | grep CUDNN_MAJOR -A 2检查是否安装成功
12、OpenCV4.5安装
先更新和升级软件
sudo apt-get update
sudo apt-get upgradepython版本
安装pip3,以后用pip3的比较多
sudo apt-get install python3-pip
升级pip3
pip3 install --upgrade pip -i https://pypi.tuna.tsinghua.edu.cn/simple安装opencv
pip3 install opencv-python -i https://pypi.tuna.tsinghua.edu.cn/simple
pip3 install opencv-contrib-python -i https://pypi.tuna.tsinghua.edu.cn/simplec++版本
安装cmake编译工具和cmake-qt-gui
sudo apt-get install cmake sudo apt-get install cmake-qt-gui安装依赖
sudo apt-get install build-essential cmake unzip pkg-config
sudo apt-get install libjpeg-dev libpng-dev libtiff-dev
sudo apt-get install libavcodec-dev libavformat-dev libswscale-dev libv4l-dev
sudo apt-get install libxvidcore-dev libx264-dev
sudo apt-get install libgtk-3-dev
sudo apt-get install libatlas-base-dev gfortran
sudo apt-get install python3-dev下载opencv-4.5.0源码https://github.com/opencv/opencv/releases
下载opencv-contrib-4.5.0源码https://github.com/opencv/opencv_contrib/releases
在opencv-4.5.0下创建文件夹build
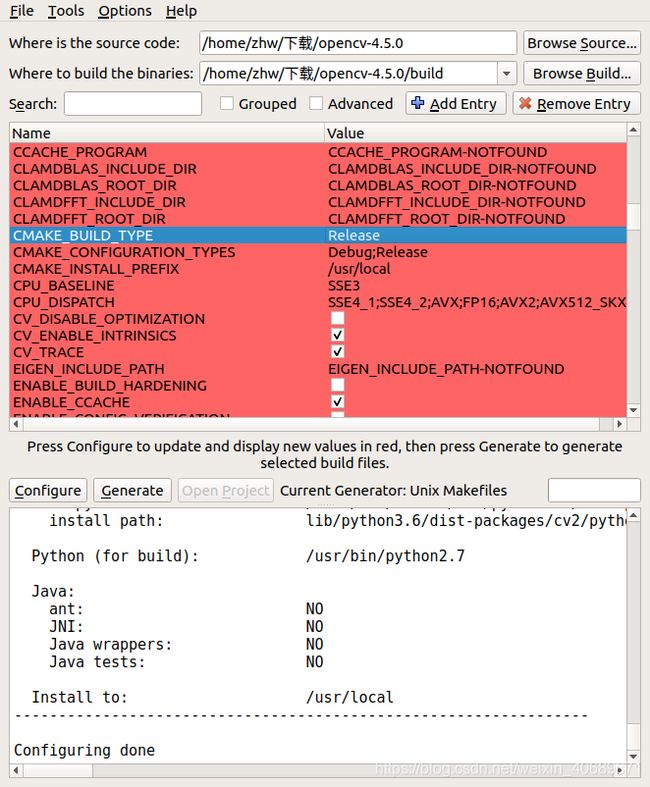
打开cmake-qt-gui,设定source code目录为/home/zhw/下载/opencv-4.5.0,zhw是用户名,设定binaries目录为刚才新建的build目录,也就是/home/zhw/下载/opencv-4.5.0/build点击configure,configure done以后,在中间部分修改
将OPENCV_GENERATE_PKGCONFIG打开,新版本的OpenCV默认把这个编译选项给关掉了!如果该选项没有打开,pkg-config就没法使用了,这样,你想在命令行里直接编译opencv程序会是很痛苦的事情,只能借助CMake解决
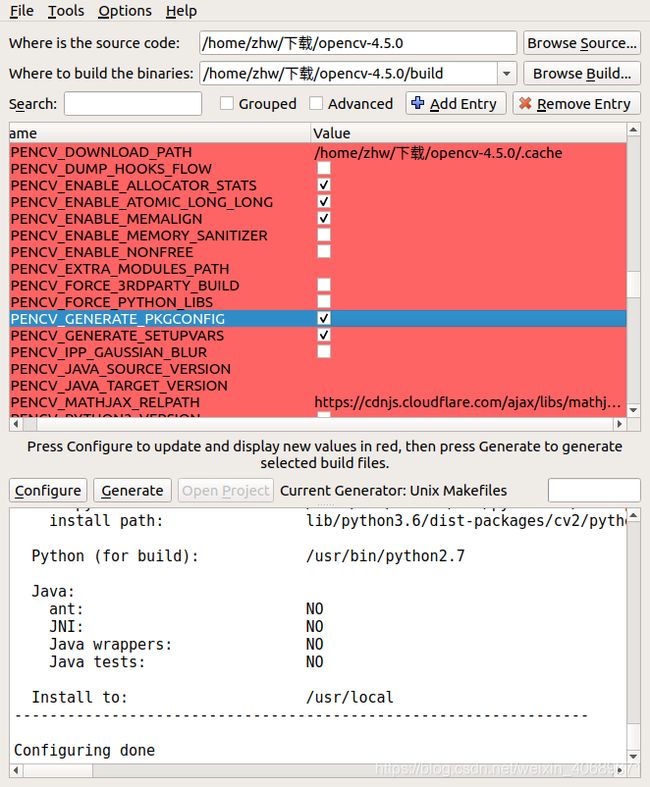
CMAKE_BUILD_TYPE输入Release
为了编译opencv_contrib,需要在cmake-gui中将编译选项OPENCV_EXTRA_MODULES_PATH填入contrib库所在的路径,比如/home/your-name/opencv_contrib-4.1.1/modules/
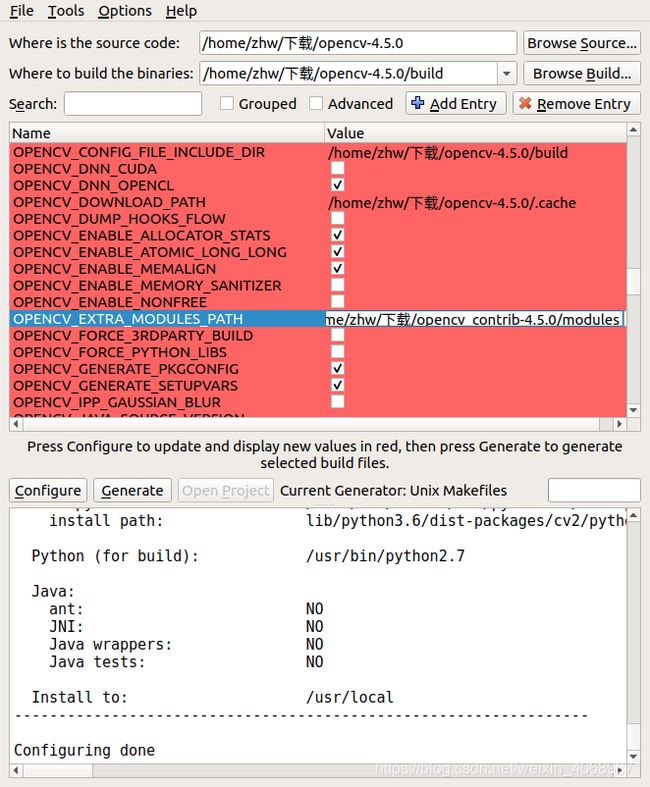
完了之后,点击generate
在刚创建的build下面打开终端,其中-j8代表cpu 8核心,比如amd R74800H就是8核心,根据自己的修改
make -j8不出意外会出现这个问题
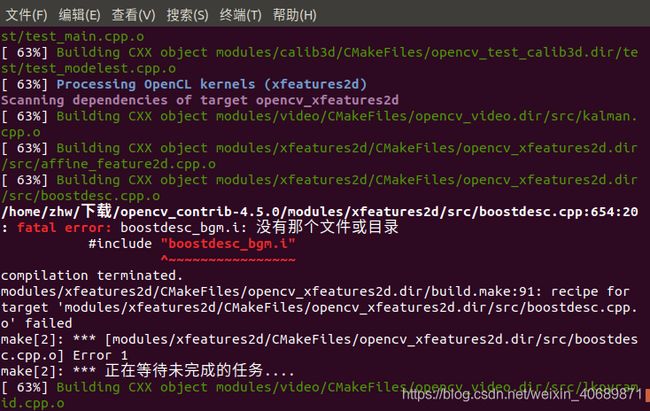
解决方法:https://blog.csdn.net/u011736771/article/details/85960300
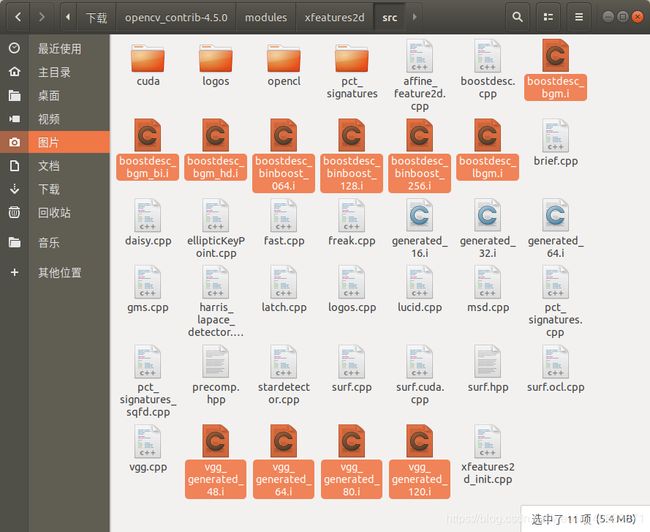
缺失文件 https://pan.baidu.com/s/1BeYF8kqEZLAJYQj-MvxpmA 提取码:e1wc 放在/home/zhw/下载/opencv_contrib-4.5.0/modules/xfeatures2d中
接着make -j8又出现这个问题
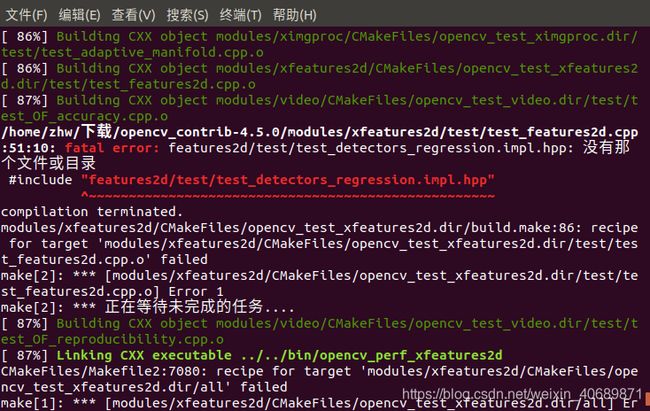
解决方法:https://blog.csdn.net/u012939880/article/details/105864932/
在/home/zhw/下载/opencv-4.5.0下的cmakelists.txt中添加include_directories("modules")
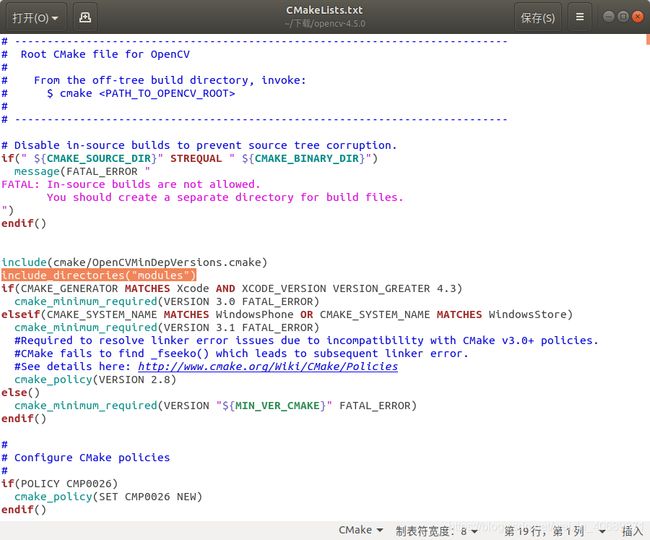
再make -j8就可以不报错,然后
sudo make install最后所有文件将被安装到目录/usr/local下面
寻找位置opencv4.pc的位置
find / -iname opencv4.pc在这里/usr/local/lib/pkgconfig/opencv4.pc
验证pkg-config功能是否正确
pkg-config --cflags --libs opencv4命令行输入
sudo gedit /etc/bash.bashrc添加
PKG_CONFIG_PATH=$PKG_CONFIG_PATH:/usr/local/lib/pkgconfig
export PKG_CONFIG_PATH
保存退出,查看opencv版本
pkg-config --modversion opencv4
配置动态库环境
sudo vim /etc/ld.so.conf.d/opencv.conf创建的文件中加上/usr/local/lib,运行以下命令
sudo ldconfig测试opencv是否安装成功
cd 到/opencv/samples/cpp/example_cmake目录下,依次执行以下命令:
cmake .
make
./opencv_example该测试需要电脑有摄像头,如果启动摄像头看到了画面,说明安装成功
卸载OpenCV4
找到源码路径,在终端中进入到build目录,依次执行:
sudo make uninstall
cd ..
sudo rm -r build
在/usr/local下搜索opencv4
sudo find ./ -name opencv4*
将找到的opencv相关项删除即可,大概删除以下项:
sudo rm -r /usr/local/include/opencv4
sudo rm -r /usr/local/lib/pkgconfig/opencv4.pc
sudo rm -r /usr/local/lib/cmake/opencv4
sudo rm -r /usr/local/share/licenses/opencv4
sudo rm -r /usr/local/share/opencv4在project(test_cpp)后面加入下面一句:
find_package(OpenCV REQUIRED)
在add_executable(test_cpp main.cpp)后面加入下面一句:
target_link_libraries(test_cpp PRIVATE ${OpenCV_LIBS})
一个简单的参考示例如下:
cmake_minimum_required(VERSION 3.15)
project(test_cpp)
find_package(OpenCV REQUIRED)
set(CMAKE_CXX_STANDARD 11)
# 设置可执行文件的存放路径,当读取项目下的图片时可正常的使用相对路径,而不需要在前面加上../
set(EXECUTABLE_OUTPUT_PATH ${PROJECT_SOURCE_DIR})
add_executable(test_cpp main.cpp)
target_link_libraries(test_cpp PRIVATE ${OpenCV_LIBS})