python实现PID
最近捣鼓ROS的时候,发现github上有人用python实现了PID,虽然可能执行效率不高,但是用python写工具的时候还是很方便的。从github上把代码搬下来,简单分析一下
给代码:
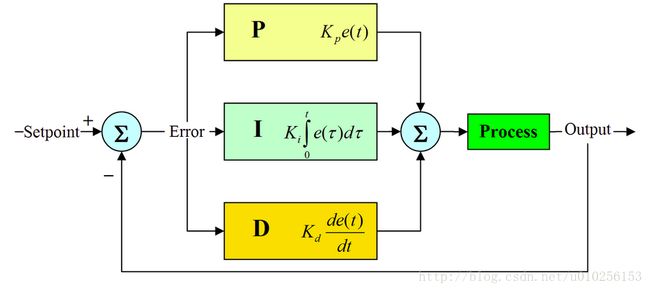
在截个都看烦了的公式意思一下吧

#!/usr/bin/python
#
# This file is part of IvPID.
# Copyright (C) 2015 Ivmech Mechatronics Ltd. 注释很完美,没有能解释的啊
待会写个程序,用plot画个图线,验证一下