《Gated-SCNN: Gated Shape CNNs for Semantic Segmentation》论文笔记
- 这篇论文收录在ICCV2019的语义分割领域中,其核心思想采用了双流机制(regular stream和shape stream)以及ASPP进行分割处理。
论文链接:https://arxiv.org/abs/1907.05740
开源代码:https://nv-tlabs.github.io/GSCNN/
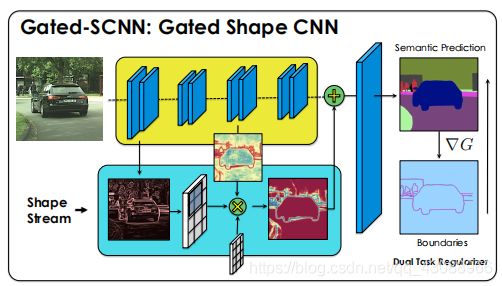
1、在Regular Stream中,采用传统CNN网络如ResNet、VGGNet、WideResnet等作为Backbone。
2、将Regular Stream和Shape Stream产生的feature map进行融合,融合采用的是Atrous Spatial Pyramid Pooling(ASPP)方法。
3、在Regular Stream中,加入来自Shape Stream的边界语义信息(类似Attention机制)的局部指引,两者的结合是采用文章中提出的Gated Convolutional Layer(GCL)。

**
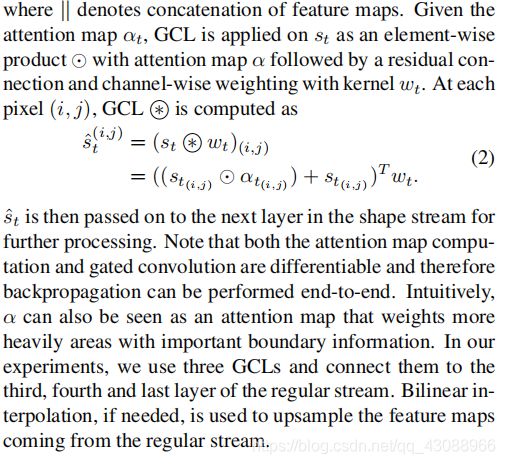
Gated Convolutional Layer(GCL)
we first obtain an attention map αt ∈ RH×W
by concatenating rt and st followed by a normalized 1 × 1
convolutional layer C1×1 which in turn is followed by a sigmoid function σ :
![]()
**
**
Gated-SCNN源代码:
**
class GSCNN(nn.Module):
'''
Wide_resnet version of DeepLabV3
mod1
pool2
mod2 str2
pool3
mod3-7
structure: [3, 3, 6, 3, 1, 1]
channels = [(128, 128), (256, 256), (512, 512), (512, 1024), (512, 1024, 2048),
(1024, 2048, 4096)]
'''
def __init__(self, num_classes, trunk=None, criterion=None):
super(GSCNN, self).__init__()
self.criterion = criterion
self.num_classes = num_classes
wide_resnet = wider_resnet38_a2(classes=1000, dilation=True)
wide_resnet = torch.nn.DataParallel(wide_resnet)
wide_resnet = wide_resnet.module
self.mod1 = wide_resnet.mod1
self.mod2 = wide_resnet.mod2
self.mod3 = wide_resnet.mod3
self.mod4 = wide_resnet.mod4
self.mod5 = wide_resnet.mod5
self.mod6 = wide_resnet.mod6
self.mod7 = wide_resnet.mod7
self.pool2 = wide_resnet.pool2
self.pool3 = wide_resnet.pool3
self.interpolate = F.interpolate
del wide_resnet
self.dsn1 = nn.Conv2d(64, 1, 1)
self.dsn3 = nn.Conv2d(256, 1, 1)
self.dsn4 = nn.Conv2d(512, 1, 1)
self.dsn7 = nn.Conv2d(4096, 1, 1)
self.res1 = Resnet.BasicBlock(64, 64, stride=1, downsample=None)
self.d1 = nn.Conv2d(64, 32, 1)
self.res2 = Resnet.BasicBlock(32, 32, stride=1, downsample=None)
self.d2 = nn.Conv2d(32, 16, 1)
self.res3 = Resnet.BasicBlock(16, 16, stride=1, downsample=None)
self.d3 = nn.Conv2d(16, 8, 1)
self.fuse = nn.Conv2d(8, 1, kernel_size=1, padding=0, bias=False)
self.cw = nn.Conv2d(2, 1, kernel_size=1, padding=0, bias=False)
self.gate1 = gsc.GatedSpatialConv2d(32, 32)
self.gate2 = gsc.GatedSpatialConv2d(16, 16)
self.gate3 = gsc.GatedSpatialConv2d(8, 8)
self.aspp = _AtrousSpatialPyramidPoolingModule(4096, 256,
output_stride=8)
self.bot_fine = nn.Conv2d(128, 48, kernel_size=1, bias=False)
self.bot_aspp = nn.Conv2d(1280 + 256, 256, kernel_size=1, bias=False)
self.final_seg = nn.Sequential(
nn.Conv2d(256 + 48, 256, kernel_size=3, padding=1, bias=False),
Norm2d(256),
nn.ReLU(inplace=True),
nn.Conv2d(256, 256, kernel_size=3, padding=1, bias=False),
Norm2d(256),
nn.ReLU(inplace=True),
nn.Conv2d(256, num_classes, kernel_size=1, bias=False))
self.sigmoid = nn.Sigmoid()
initialize_weights(self.final_seg)
def forward(self, inp, gts=None):
x_size = inp.size()
# res 1
m1 = self.mod1(inp)
# res 2
m2 = self.mod2(self.pool2(m1))
# res 3
m3 = self.mod3(self.pool3(m2))
# res 4-7
m4 = self.mod4(m3)
m5 = self.mod5(m4)
m6 = self.mod6(m5)
m7 = self.mod7(m6)
s3 = F.interpolate(self.dsn3(m3), x_size[2:],
mode='bilinear', align_corners=True)
s4 = F.interpolate(self.dsn4(m4), x_size[2:],
mode='bilinear', align_corners=True)
s7 = F.interpolate(self.dsn7(m7), x_size[2:],
mode='bilinear', align_corners=True)
m1f = F.interpolate(m1, x_size[2:], mode='bilinear', align_corners=True)
im_arr = inp.cpu().numpy().transpose((0,2,3,1)).astype(np.uint8)
canny = np.zeros((x_size[0], 1, x_size[2], x_size[3]))
for i in range(x_size[0]):
canny[i] = cv2.Canny(im_arr[i],10,100)
canny = torch.from_numpy(canny).cuda().float()
cs = self.res1(m1f)
cs = F.interpolate(cs, x_size[2:],
mode='bilinear', align_corners=True)
cs = self.d1(cs)
cs = self.gate1(cs, s3)
cs = self.res2(cs)
cs = F.interpolate(cs, x_size[2:],
mode='bilinear', align_corners=True)
cs = self.d2(cs)
cs = self.gate2(cs, s4)
cs = self.res3(cs)
cs = F.interpolate(cs, x_size[2:],
mode='bilinear', align_corners=True)
cs = self.d3(cs)
cs = self.gate3(cs, s7)
cs = self.fuse(cs)
cs = F.interpolate(cs, x_size[2:],
mode='bilinear', align_corners=True)
edge_out = self.sigmoid(cs)
cat = torch.cat((edge_out, canny), dim=1)
acts = self.cw(cat)
acts = self.sigmoid(acts)
# aspp
x = self.aspp(m7, acts)
dec0_up = self.bot_aspp(x)
dec0_fine = self.bot_fine(m2)
dec0_up = self.interpolate(dec0_up, m2.size()[2:], mode='bilinear',align_corners=True)
dec0 = [dec0_fine, dec0_up]
dec0 = torch.cat(dec0, 1)
dec1 = self.final_seg(dec0)
seg_out = self.interpolate(dec1, x_size[2:], mode='bilinear')
if self.training:
return self.criterion((seg_out, edge_out), gts)
else:
return seg_out, edge_out
空洞卷积的计算公式如下:

下面是ASPP模块的实现过程,其本质是实现特征的多尺度分割,ASPP始于Deeplab V3中,采用1x1卷积,还有三个dilated分别为6、12、18的3x3的空洞卷积,以及一个全局的Adaptive Pooling共5路并行,最终进行Concat。本文采用的ASPP还加入了最终生成的边界特征图。
class _AtrousSpatialPyramidPoolingModule(nn.Module):
'''
operations performed:
1x1 x depth
3x3 x depth dilation 6
3x3 x depth dilation 12
3x3 x depth dilation 18
image pooling
concatenate all together
Final 1x1 conv
'''
def __init__(self, in_dim, reduction_dim=256, output_stride=16, rates=[6, 12, 18]):
super(_AtrousSpatialPyramidPoolingModule, self).__init__()
# Check if we are using distributed BN and use the nn from encoding.nn
# library rather than using standard pytorch.nn
if output_stride == 8:
rates = [2 * r for r in rates]
elif output_stride == 16:
pass
else:
raise 'output stride of {} not supported'.format(output_stride)
self.features = []
# 1x1
self.features.append(
nn.Sequential(nn.Conv2d(in_dim, reduction_dim, kernel_size=1, bias=False),
Norm2d(reduction_dim),
nn.ReLU(inplace=True)))
# other rates
for r in rates:
self.features.append(nn.Sequential(
nn.Conv2d(in_dim, reduction_dim, kernel_size=3,
dilation=r, padding=r, bias=False),
Norm2d(reduction_dim),
nn.ReLU(inplace=True)
))
self.features = torch.nn.ModuleList(self.features)
# img level features
self.img_pooling = nn.AdaptiveAvgPool2d(1)
self.img_conv = nn.Sequential(
nn.Conv2d(in_dim, reduction_dim, kernel_size=1, bias=False),
Norm2d(reduction_dim),
nn.ReLU(inplace=True))
self.edge_conv = nn.Sequential(
nn.Conv2d(1, reduction_dim, kernel_size=1, bias=False),
Norm2d(reduction_dim),
nn.ReLU(inplace=True))
def forward(self, x, edge):
x_size = x.size()
img_features = self.img_pooling(x)
img_features = self.img_conv(img_features)
img_features = F.interpolate(img_features, x_size[2:],
mode='bilinear',align_corners=True)
out = img_features
edge_features = F.interpolate(edge, x_size[2:],
mode='bilinear',align_corners=True)
edge_features = self.edge_conv(edge_features)
out = torch.cat((out, edge_features), 1)
for f in self.features:
y = f(x)
out = torch.cat((out, y), 1)
return out
实验部分中,数据集为Cityscapes,baseline是Deeplab V3


分割结果:
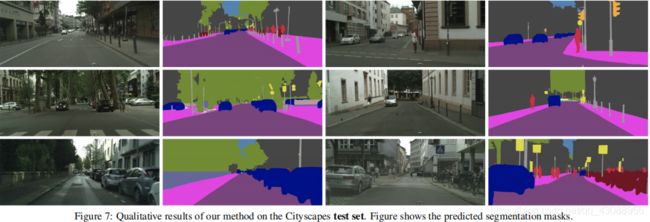


结论:
本文提出了一种新的两流CNN语义分割结构:SCNN(GSCNN)。我们采用了一种新的选通机制来连接中间层,并利用语义分割和语义边界预测任务之间的二重性,提出了一种新的损失函数。我们的实验表明,这导致了一种高效的体系结构,在对象边界周围产生了更精确的预测,并大大提高了对较薄和较小对象的性能。 我们的体系结构在具有挑战性的 Cityscapes 数据集上取得了最先进的结果,大大改善了强大的基线.