ROS学习(四)发布者与订阅者
目录
一、发布者与订阅者通讯关系
二、发布者
1.一般创建步骤
2.配置CMakeLists.txt中的编译规则
3.编译
4.设置环境变量
5.运行发布者
三、订阅者
1一般创建步骤
2.在CMakeLists.txt中配置,build区域下
3.编译
4.设置环境变量
5.运行发布者
四、发布者与订阅者案例
1.发布者
1)创建功能包 learning_topic
2)创建发布者代码(velocity_publisher.cpp)
3)配置CMakeLists.txt中的编译规则
4)编译
5)设置环境变量
6)运行发布者
2.订阅者
1.创建pose_subscriber.cpp文件
2.配置CMakeLists.txt中的编译规则
3.编译
4.设置环境变量
5.运行发布者
五、自定义话题信息
1.定义msg文件
2.在 package.xml中添加功能依赖包
3.在CMakeLists.txt添加编译选项
4.编译生成语言相关文件
六、自定义话题案例
1.自定义话题信息
2.在 package.xml中添加功能依赖包
3.在CMakeLists.txt添加编译选项
4.编译生成语言相关文件
5.应用此自定义话题
1)在话题功能包的src目录下创建person_publisher.cpp
2)创建person_subscriber.cpp
一、发布者与订阅者通讯关系

实现过程
发布者发布信息,通过话题(topic)传输,订阅者通过订阅得到数据并执行操作
发布者的数据结构为twist,订阅者为pose
二、发布者
1.一般创建步骤
- 初始化ROS节点:ros::init( )
- 向ROS Master注册节点信息,包括发布的话题名和话题中的消息类型
- 创建消息数据
- 按照一定频率循环发布消息
#include
#include <消息类型yyy.h>
int main(int argc, char **argv)
{
// ROS节点初始化
ros::init(argc, argv, "节点名");//节点名不允许重复
// 创建节点句柄
ros::NodeHandle n;
//创建发布者
ros::Publisher 发布者 = n.advertise<消息类型>("话题名", 队列长度);
// 设置循环的频率
ros::Rate loop_rate(频率);
int count = 0;
while (ros::ok())
{
// 初始化消息
消息类型 消息类型对象;
消息类型对象.成员1 = xx;//对消息类型对象进行设置
消息类型对象.成员2 = xx;
// 发布消息
发布者.publish(消息类型对象);
ROS_INFO("Publsh turtle velocity command[%0.2f m/s, %0.2f rad/s]",
消息类型对象.xx1, 消息类型对象.xx2);
// 按照循环频率延时
loop_rate.sleep();
}
return 0;
}
注:
ros::init( ); //初始化ROS节点
ros::NodeHandle n; //创建节点句柄
ros::ok(); //检测节点是否开启;开启为true
ros::INFO( ); //输出消息,与printf( )语法相似
%s //字符串
%d //整数
%f //浮点数
%0.2f //小数后精确到2位
2.配置CMakeLists.txt中的编译规则
- 设置需要编译的代码和生成的可执行文件
- 设置链接库
功能包内CMakeLists.txt中build区域下加上:
add_executable(节点名 .cpp文件地址)#从工作空间src开始:/src/xxxx/xxx.cpp #运行
target_link_libraries(节点名 ${catkin_LIBRARIES}) #库连接如果是自定义话题还要加上
add_dependencies(节点名 ${PROJECT_NAME}_generate_messages_cpp) #连接依赖,与自定义消息连接注:是加在功能包内CMakeLists.txt中,不是工作空间下
3.编译
cd ~/工作空间
catkin_make4.设置环境变量
source devel/setup.bash #需要配置环境变量,否则系统无法找到运行程序注:每次运行都需要设置环境变量,如果嫌麻烦可以:
- 在主目录下
- ctrl+h显示隐藏文件
- 找到".bashrc"文件,打开
- 在文件最后位置加上“source /home/xxx/catkin_ws/devel/setup.bash”
- 此处路径要全,xxx表示用户名
5.运行发布者
roscore
rosrun 功能包名 节点名三、订阅者
1一般创建步骤
- 初始化ROS节点
- 订阅需要的话题
- 循环等待话题消息,接收到消息后进入回调函数
- 在回调函数中完成消息处理。
#include
#include "消息类型"
// 接收到订阅的消息后,会进入消息回调函数
void 回调函数名(const 消息类型::ConstPtr& 对象名1)
{
//对消息进行处理
//不能过于复杂
//如将接收到的消息打印出来
ROS_INFO("Turtle pose: x:%0.6f, y:%0.6f", 对象名1->成员1, 对象名1->成员2);
}
int main(int argc, char **argv)
{
// 初始化ROS节点
ros::init(argc, argv, "订阅的节点名");
// 创建节点句柄,管理节点资源
ros::NodeHandle n;
//创建订阅对象
ros::Subscriber 对象名2 = n.subscribe("话题名", 队列长度, 回调函数名);
// 循环等待回调函数
ros::spin();
return 0;
}
注:回调函数要高效快速
ConstPtr:常指针类型
2.在CMakeLists.txt中配置,build区域下
add_executable(节点名 .cpp文件地址)#从工作空间src开始:/src/xxxx/xxx.cpp #运行
target_link_libraries(节点名 ${catkin_LIBRARIES}) #库连接如果是自定义话题还要加上
add_dependencies(节点名 ${PROJECT_NAME}_generate_messages_cpp) #连接依赖,与自定义消息连接3.编译
cd ~/工作空间
catkin_make4.设置环境变量
source devel/setup.bash #需要配置环境变量,否则系统无法找到运行程序注:每次运行都需要设置环境变量,
5.运行发布者
roscore
rosrun 功能包名 节点名四、发布者与订阅者案例
实现内容:通过发布话题控制海龟运动,并且通过订阅话题接受海龟实时位置
ROS发布话题与订阅话题 https://download.csdn.net/download/m0_56451176/86398718?spm=1001.2014.3001.5503
https://download.csdn.net/download/m0_56451176/86398718?spm=1001.2014.3001.5503
1.发布者
1)创建功能包 learning_topic
cd ~/catkin_ws/src
catkin_create_pkg learning_topic roscpp rospy std_msgs geometry_msgs turtlesim2)创建发布者代码(velocity_publisher.cpp)
cd learning_topic/srctouch velocity_publisher.cpp
gedit velocity_publisher.cpp代码内容如下:
//该例程将发布turtle1/cmd_vel话题,消息类型geometry_msgs::Twist
#include
#include
int main(int argc, char **argv)
{
// ROS节点初始化
ros::init(argc, argv, "velocity_publisher");
// 创建节点句柄
ros::NodeHandle n;
// 创建一个Publisher,发布名为/turtle1/cmd_vel的topic,消息类型为geometry_msgs::Twist,队列长度10
ros::Publisher turtle_vel_pub = n.advertise("/turtle1/cmd_vel", 10);
// 设置循环的频率
ros::Rate loop_rate(10);
int count = 0;
while (ros::ok())
{
// 初始化geometry_msgs::Twist类型的消息
geometry_msgs::Twist vel_msg;
vel_msg.linear.x = 0.5;
vel_msg.angular.z = 0.2;
// 发布消息
turtle_vel_pub.publish(vel_msg);
ROS_INFO("Publsh turtle velocity command[%0.2f m/s, %0.2f rad/s]",
vel_msg.linear.x, vel_msg.angular.z);
// 按照循环频率延时
loop_rate.sleep();
}
return 0;
}
注:
vel_msg.linear.x = 0.5; //设置海龟x方向线速度为0.5m/s
vel_msg.angular.z = 0.2; //设置海龟z方向角速度为0.2rad/s
3)配置CMakeLists.txt中的编译规则
CMakeLists.txt中build区域下加上:
add_executable(velocity_publisher src/velocity_publisher.cpp)
target_link_libraries(velocity_publisher ${catkin_LIBRARIES}) 4)编译
4)编译
cd ~/catkin_ws
catkin_make5)设置环境变量
source devel/setup.bash #需要配置环境变量,否则系统无法找到运行程序
6)运行发布者
运行ros核心
roscore
启动海龟仿真器
rosrun turtlesim turtlesim_node发布话题
注:打开新的终端需要加上source ~/catkin_ws/devel/setup.bash
source ~/catkin_ws/devel/setup.bash
rosrun learning_topic velocity_publisher
2.订阅者
1.创建pose_subscriber.cpp文件
话题功能包已存在~/catkin_ws/src
在功能包的src文件夹建立pose_subscriber.cpp文件
cd ~/catkin_ws/src/learning_topic/src
touch pose_subscriber.cpp
gedit pose_subscriber.cpp代码内容如下:
//该例程将订阅/turtle1/pose话题,消息类型turtlesim::Pose
#include
#include "turtlesim/Pose.h"
// 接收到订阅的消息后,会进入消息回调函数
void poseCallback(const turtlesim::Pose::ConstPtr& msg)
{
// 将接收到的消息打印出来
ROS_INFO("Turtle pose: x:%0.6f, y:%0.6f", msg->x, msg->y);
}
int main(int argc, char **argv)
{
// 初始化ROS节点
ros::init(argc, argv, "pose_subscriber");
// 创建节点句柄,管理节点资源
ros::NodeHandle n;
// 创建一个Subscriber,订阅名为/turtle1/pose的topic,注册回调函数poseCallback
ros::Subscriber pose_sub = n.subscribe("/turtle1/pose", 10, poseCallback);
// 循环等待回调函数
ros::spin();
return 0;
}
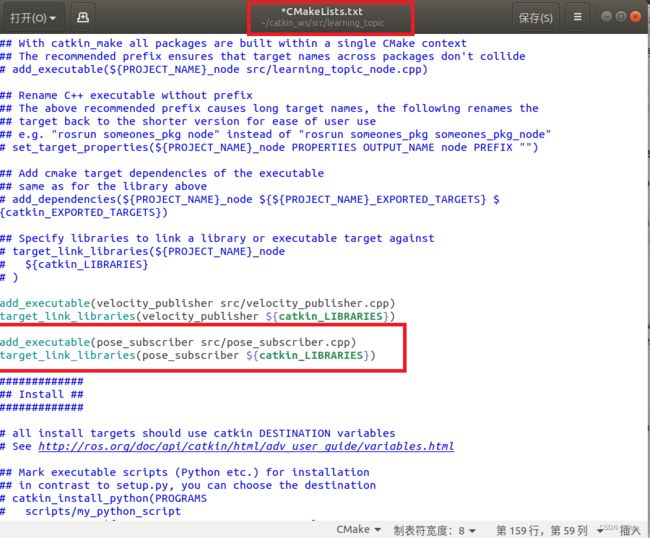
2.配置CMakeLists.txt中的编译规则
CMakeLists.txt中build区域下加上:
add_executable(pose_subscriber src/pose_subscriber.cpp)
target_link_libraries(pose_subscriber ${catkin_LIBRARIES})
 3.编译
3.编译
cd ~/catkin_ws
catkin_make4.设置环境变量
source devel/setup.bash
5.运行发布者
运行ros核心
roscore
启动海龟仿真器
rosrun turtlesim turtlesim_node发布话题
注:打开新的终端需要加上source ~/catkin_ws/devel/setup.bash
source ~/catkin_ws/devel/setup.bash
rosrun learning_topic pose_subscriber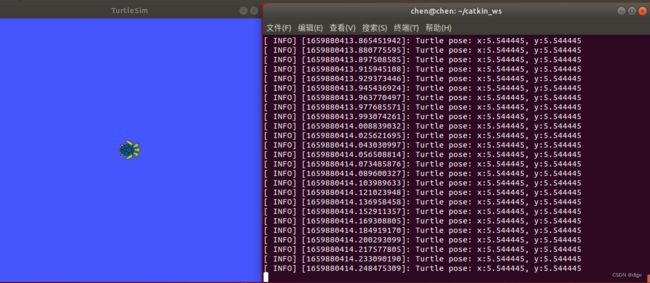
6.加上发布者
注:打开新的终端需要加上source ~/catkin_ws/devel/setup.bash
source ~/catkin_ws/devel/setup.bash
rosrun learning_topic velocity_publisher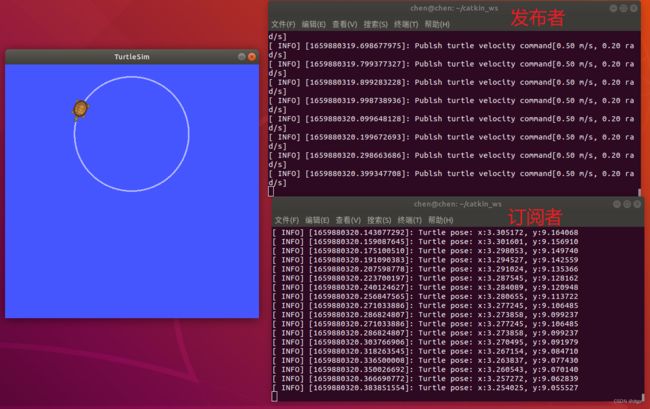
五、自定义话题信息
1.定义msg文件
cd 功能包路径
mkdir msg
touch xxx.msg
在话题功能包中创建msg文件夹,用于存储自定义话题的文件
在msg文件夹中创建xxx.msg,作为数据接口
gedit xxx.msgxxx.msg内容如下:
数据类型 对象名1
数据类型 对象名2
.
.
.
数据类型 对象名n
#宏定义,此处对象名与上方不同
数据类型 对象名_1=xx
数据类型 对象名_2=xx
.
.
.
数据类型 对象名_n=xx
注:不能使用Tab进行缩进
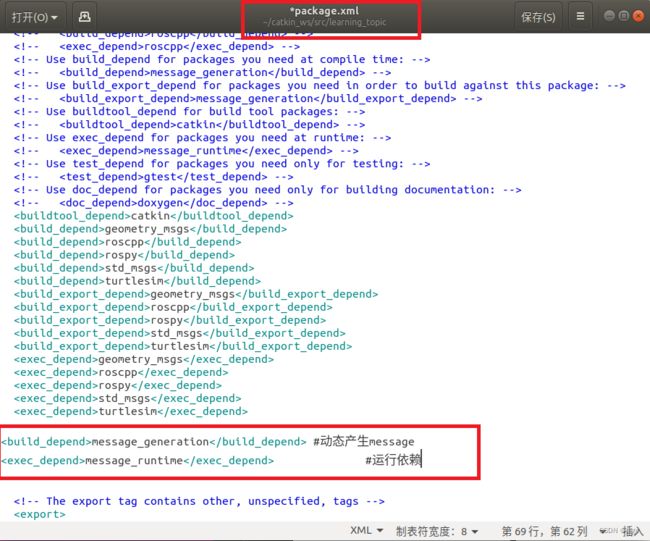
2.在 package.xml中添加功能依赖包
在话题功能包的package.xml中添加功能包的编译依赖和运行依赖
message_generation #动态产生message
message_runtime #运行依赖
3.在CMakeLists.txt添加编译选项
find_package(....... message_generation)
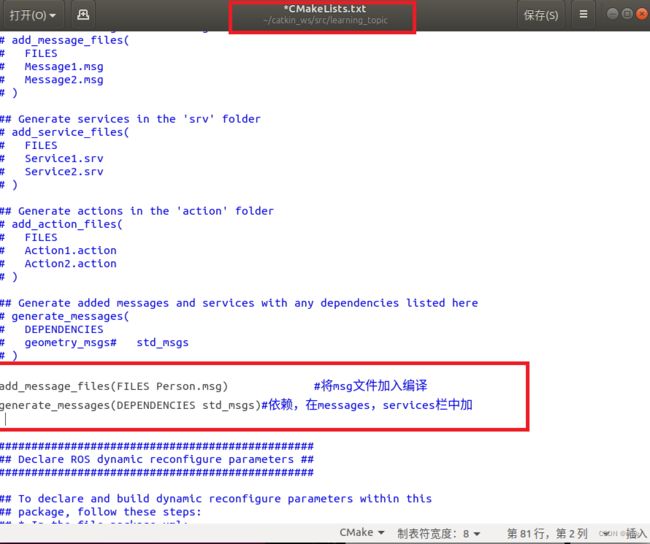
add_message_files(FILES xxx.msg) #将msg文件加入编译
generate_messages(DEPENDENCIES std_msgs)#依赖,在messages,services栏中加
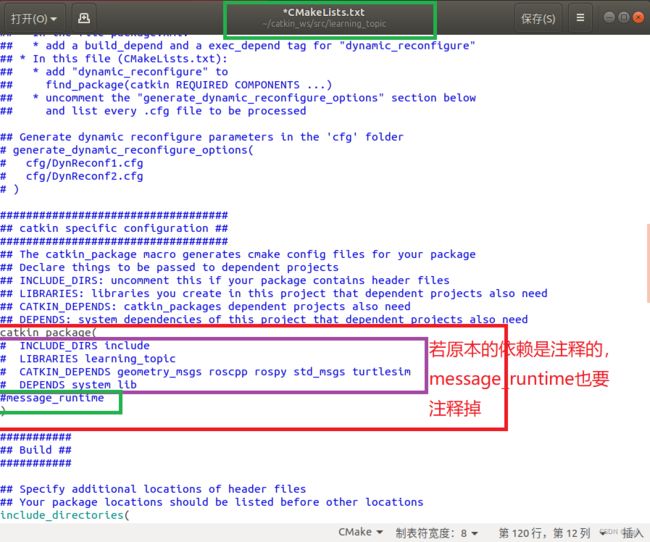
catkin_package(...... message_runtime) #依赖若被注释要取消4.编译生成语言相关文件
cd ~/工作空间路径
catkin_make六、自定义话题案例
实现内容:发布和订阅个人的姓名和性别这些信息
1.自定义话题信息
cd ~/catkin_ws/src/learning_topic
mkdir msg
cd msg
touch Person.msg
gedit Person.msgPerson.msg内容如下:
string name #字符串对象name
uint8 sex
uint8 age
uint8 unknown = 0 #宏定义
uint8 male = 1
uint8 female = 2
注:定义姓名、性别、年龄
宏定义:未知、男、女
2.在 package.xml中添加功能依赖包
在话题功能包的package.xml中添加功能包的编译依赖和运行依赖
message_generation #动态产生message
message_runtime #运行依赖
3.在CMakeLists.txt添加编译选项
find_package(....... message_generation)
add_message_files(FILES Person.msg) #将msg文件加入编译
generate_messages(DEPENDENCIES std_msgs)#依赖,在messages,services栏中加
catkin_package(...... message_runtime) #依赖若被注释要取消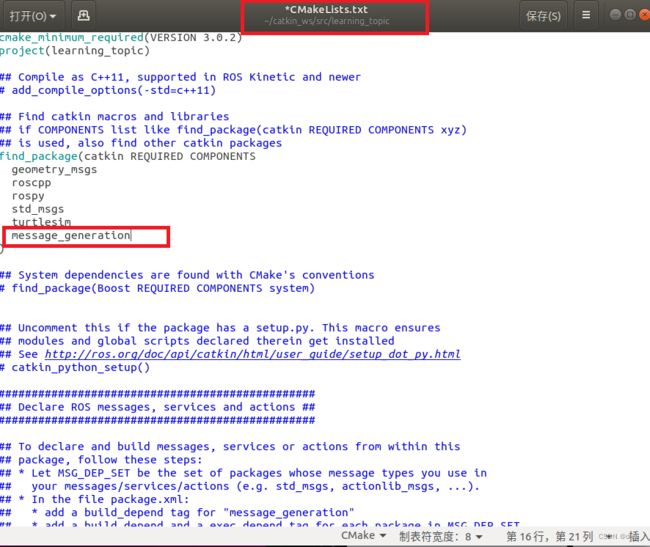
4.编译生成语言相关文件
cd ~/catkin_ws
catkin_make5.应用此自定义话题
1)在话题功能包的src目录下创建person_publisher.cpp
cd ~/catkin_ws/src/learning_topic/src
touch person_publisher.cpp
gedit person_publisher.cppperson_publisher.cpp内容如下
//该例程将发布/person_info话题,自定义消息类型learning_topic::Person
#include
#include "learning_topic/Person.h"
int main(int argc, char **argv){
// ROS节点初始化
ros::init(argc, argv, "person_publisher");
// 创建节点句柄
ros::NodeHandle n;
// 创建一个Publisher,发布名为/person_info的topic,消息类型为learning_topic::Person,队列长度10
ros::Publisher person_info_pub = n.advertise("/person_info", 10);
// 设置循环的频率
ros::Rate loop_rate(1);
int count = 0;
while (ros::ok()){
// 初始化learning_topic::Person类型的消息
learning_topic::Person person_msg; //定义Person对象
person_msg.name = "Tom";
person_msg.age = 18;
person_msg.sex = learning_topic::Person::male;
// 发布消息
person_info_pub.publish(person_msg);
ROS_INFO("Publish Person Info: name:%s age:%d sex:%d",
person_msg.name.c_str(), person_msg.age, person_msg.sex);
// 按照循环频率延时
loop_rate.sleep();
}
return 0;
}
2)创建person_subscriber.cpp
cd ~/catkin_ws/src/learning_topic/src
touch person_subscriber.cpp
gedit person_subscriber.cppperson_subscriber.cpp内容如下:
//该例程将订阅/person_info话题,自定义消息类型learning_topic::Person
#include
#include "learning_topic/Person.h"
// 接收到订阅的消息后,会进入消息回调函数
void personInfoCallback(const learning_topic::Person::ConstPtr& msg){
// 将接收到的消息打印出来
ROS_INFO("Subcribe Person Info: name:%s age:%d sex:%d", msg->name.c_str(), msg->age, msg->sex);
}
int main(int argc, char **argv){
// 初始化ROS节点
ros::init(argc, argv, "person_subscriber");
// 创建节点句柄
ros::NodeHandle n;
// 创建一个Subscriber,订阅名为/person_info的topic,注册回调函数personInfoCallback
ros::Subscriber person_info_sub = n.subscribe("/person_info", 10, personInfoCallback);
// 循环等待回调函数
ros::spin();
return 0;
}
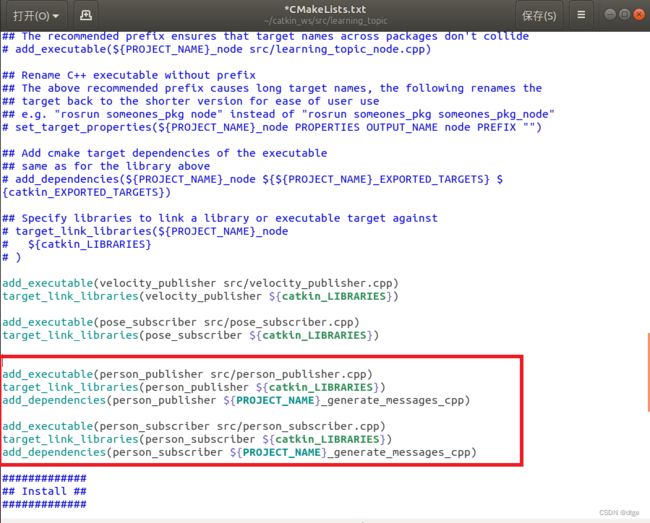
配置功能包的CMakeLists.txt中的编译规则,build栏中
add_executable(person_publisher src/person_publisher.cpp) #运行
target_link_libraries(person_publisher ${catkin_LIBRARIES}) #库连接
add_dependencies(person_publisher ${PROJECT_NAME}_generate_messages_cpp) #连接依赖,与自定义消息连接
add_executable(person_subscriber src/person_subscriber.cpp)
target_link_libraries(person_subscriber ${catkin_LIBRARIES})
add_dependencies(person_subscriber ${PROJECT_NAME}_generate_messages_cpp)
编译
cd ~/catkin_ws
catkin_make
source ~/catkin_ws/devel/setup.bash运行
roscore
source ~/catkin_ws/devel/setup.bash
rosrun learning_topic person_publishersource ~/catkin_ws/devel/setup.bash
rosrun learning_topic person_subscriber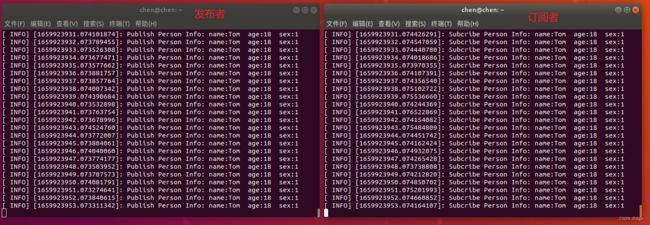
注:1.订阅者可以会有一点延迟
2.当发布者和订阅者已经建立了连接,ros master就不再必要,ros master只负责为两者建立连接,若有其他连接才再需要