移动机器人开发--ROS框架
开发思路:
完成移动移动机器人比赛,从零开始搭建ros框架,实现移动、定位导航、搬运等功能。
参考资料汇总:
- ROS基础,框架实例
ROS移动机器人+上层系统架构分析:https://blog.csdn.net/sinat_33970617/article/details/100134202
移动机器人+软件框架构思:https://zhuanlan.zhihu.com/p/34791852
ROS系统架构(中文wiki):https://www.cnblogs.com/letisl/p/11869531.html
ROS项目开发流程、框架:https://blog.csdn.net/LOVE1055259415/article/details/80023369
助老服务机器人系统设计及软件架构:https://wenku.baidu.com/view/922b5e88a8956bec0875e398
roswiki:创建package:http://wiki.ros.org/roschina/%E6%95%99%E7%A8%8B/%E5%88%9B%E5%BB%BAPackage
古月居系列总结教程(按需学习)+ROS2探索总结系列:https://www.guyuehome.com/772
- gazebo仿真相关:
Gazebo教程(turtlebot3通用示例):https://www.jianshu.com/p/4d8b8327eb9b
https://www.jianshu.com/p/014552bcc04c
https://blog.csdn.net/qq_37668436/article/details/104221075
turtlebot3+多点导航+仿真(重要示例):https://www.guyuehome.com/10949
smartcar+urdf+rviz(参考建立自己的机器人urdf模型):https://blog.csdn.net/qq_37668436/article/details/104880873
https://blog.csdn.net/qq_16775293/article/details/88189184
https://blog.csdn.net/qq_16775293/article/details/88189184?utm_medium=distribute.pc_relevant.none-task-blog-BlogCommendFromMachineLearnPai2-3.edu_weight&depth_1-utm_source=distribute.pc_relevant.none-task-blog-BlogCommendFromMachineLearnPai2-3.edu_weight
https://blog.csdn.net/weixin_41045354/article/details/103668162?utm_medium=distribute.pc_relevant_t0.none-task-blog-BlogCommendFromMachineLearnPai2-1.edu_weight&depth_1-utm_source=distribute.pc_relevant_t0.none-task-blog-BlogCommendFromMachineLearnPai2-1.edu_weight
gazebo多机器人仿真:https://www.guyuehome.com/4889
gazebo+麦克纳姆轮小车+仿真控制:https://zhuanlan.zhihu.com/p/129394095
物理仿真参数设置(惯性、碰撞、控制插件):https://blog.csdn.net/qq_43066145/article/details/104454924
(传感器、地图)https://www.cnblogs.com/linuxAndMcu/p/10876005.html
gazebo_ros_control插件:https://blog.csdn.net/sunbibei/article/details/53665876
gazebo的xacro文件添加各种plugins插件:https://blog.csdn.net/lxlong89940101/article/details/93914247
- SLAM,建图
cartographer+安装编译参数配置:https://blog.csdn.net/tiancailx/article/details/90757522
四足机器人SLAM仿真+cartographer+激光里程计:https://zhuanlan.zhihu.com/p/63061134
SLAM配置参数+实例:https://blog.csdn.net/mwlwlm/article/details/53576771
思岚雷达+官方文档:http://www.slamtec.com/cn/Support#rplidar-a-series
https://github.com/robopeak/rplidar_ros/wiki
cartographer建图实例:https://www.guyuehome.com/8039
cartographer调参:https://blog.csdn.net/weixin_42232742/article/details/86608913
- 定位
amcl参数配置+实例+评论区讨论:https://www.guyuehome.com/273
amcl介绍:https://blog.csdn.net/x_r_su/article/details/53396564
数据融合定位+robot_localization:https://www.jianshu.com/p/415b288c8f3d
robot_pose_ekf+扩展卡尔曼滤波:http://wiki.ros.org/robot_pose_ekf
https://blog.csdn.net/ethan_guo/article/details/79635575
https://blog.csdn.net/ethan_guo/article/details/79635575
imu_filter_madgwick+IMU滤波:http://wiki.ros.org/imu_filter_madgwick
- Navigation导航+路径规划
路径规划算法+dijkstra+A*:https://blog.csdn.net/qq91752728/article/details/80000477
导航框架+实例:https://zhuanlan.zhihu.com/p/118510973
欧拉角VS四元数(坐标转换在线工具):https://quaternions.online/
move_base(roswiki):http://wiki.ros.org/move_base
https://www.guyuehome.com/270
navigation框架+参数配置实例:https://blog.csdn.net/tansir94/article/details/83720740
- 上下位机通信
rosserial_python:http://wiki.ros.org/action/fullsearch/rosserial_python?action=fullsearch&context=180&value=linkto%3A%22rosserial_python%22
rosserial:https://github.com/ros-drivers/rosserial
rosserial,ros_lib移植到STM32:https://blog.csdn.net/qq_36349536/article/details/83617213
STM32f1_rosserial:https://github.com/spiralray/stm32f1_rosserial
移动机器人搭建实例:https://blog.csdn.net/weixin_42957722/article/details/103903536
- 关键知识点,示例
TF变换+激光雷达:https://blog.csdn.net/autolabor/article/details/86492895?utm_medium=distribute.pc_relevant_t0.none-task-blog-BlogCommendFromMachineLearnPai2-1.edu_weight&depth_1-utm_source=distribute.pc_relevant_t0.none-task-blog-BlogCommendFromMachineLearnPai2-1.edu_weight
各种路径规划算法+详解实例:https://github.com/zhm-real/PathPlanning
激光里程计+两个包:https://www.jianshu.com/p/34c8cd6b01c4
rf2o激光里程计:https://github.com/MAPIRlab/rf2o_laser_odometry
laser_scan_matcher_to_odom激光里程计改进:https://github.com/numb0824/LaserScanMatcherToOdom/tree/master/laser_scan_matcher_odometry-master
laser_scan_matcher_odometry激光里程计改进:https://github.com/bierschi/laser_scan_matcher_odometry
laser_scan_matcher激光里程计参数配置:https://blog.csdn.net/qq_25241325/article/details/88603652
- realsenseD435i环境配置+IMU标定
D435i标定:https://blog.csdn.net/weixin_40628128/article/details/95945945
官网技术资料:https://www.intelrealsense.com/how-to-getting-imu-data-from-d435i-and-t265/
IMU标定(通用):https://github.com/dpkoch/imu_calib
realsenseD435i RGB标定+IMU标定:https://blog.csdn.net/Hanghang_/article/details/103546033
realsenseD435i 双目标定+IMU标定:https://blog.csdn.net/xiaoxiaoyikesu/article/details/105646064#7_imu_utils_53
- 参考项目源码:
linrobot项目:https://github.com/linorobot/linorobot
塔克机器人资料,
wheeltec平衡小车之家机器人资料,
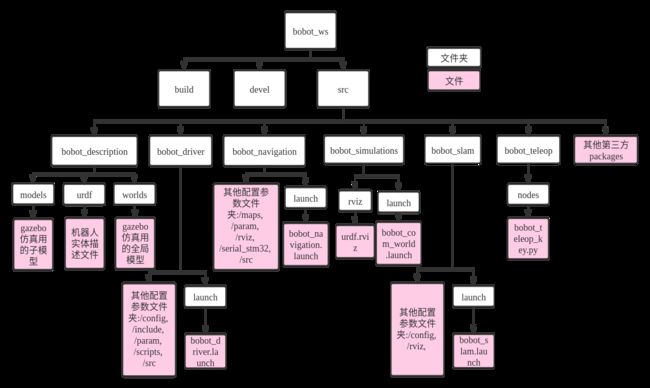
项目文件夹框架:
SLAM建图命令:
roslaunch bobot_slam bobot_slam.launchrosrun bobot_teleop bobot_teleop_key.py导航命令:
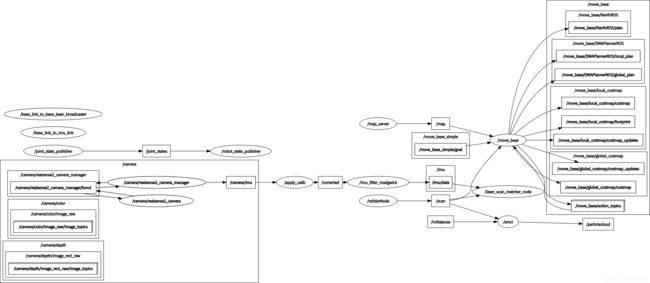
roslaunch bobot_navigation bobot_navigation.launchrosrun bobot_navigation bobot_first_second_0922.pyrqt_graph:
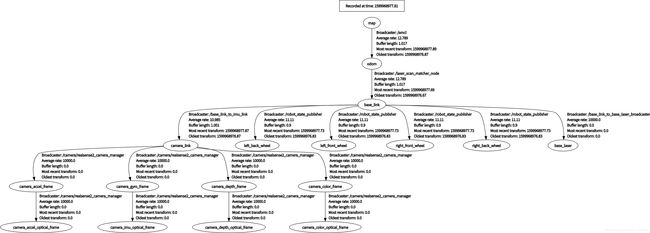
rqt_tf_tree: