OpenCvSharp 棋盘格标定助手
- 使用的是VS调用OpenCvSharp资源库进行一个Winform操作界面编写,网上找了很多开源的程序,发现根本用不了的,用的时候还需要你配置各种电脑系统变量,显得好麻烦。现在弄了个简单的标定助手,可以完美运行,带有棋盘格图像生成工具,操作简单,源码也不复杂。
这里是
using OpenCvSharp;//需要引用OpenCvSharp
using OpenCvSharp.Extensions;
using Size = OpenCvSharp.Size;
public Mat ChessBoardMat;
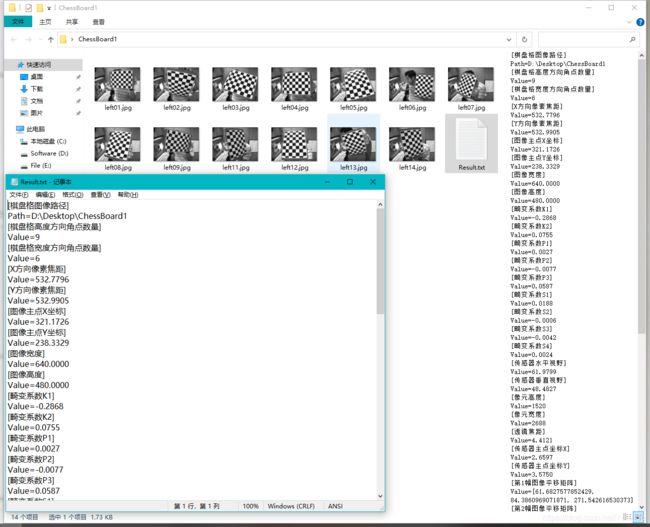
/// 结果如下:
 点击“导入图像”后,选择采集的棋盘格图像所在文件夹,结果如下:
点击“导入图像”后,选择采集的棋盘格图像所在文件夹,结果如下:

可以在图像列表看到导入结果,在参数设置那里设置正确的棋盘格角点数量后,在图像列表双击图像路径,可以实现棋盘格图像角点的提取显示:

可以提取角点之后就可以标定啦!
 标定完成后,可以进行畸变矫正,这个是进行畸变矫正的结果,在这里并没有写保存矫正结果的代码。
标定完成后,可以进行畸变矫正,这个是进行畸变矫正的结果,在这里并没有写保存矫正结果的代码。
所以只是看看就好
然后所有结果都出来了,并且自动保存结果在图像文件里内!
这里是核心源码,至于Winform的操作代码,这里就不放了。感兴趣的朋友可以去下载看看
using System;
using System.Collections.Generic;
using System.Drawing;
using System.IO;
using System.Linq;
using System.Text;
using System.Threading;
using System.Threading.Tasks;
using OpenCvSharp;
using OpenCvSharp.Extensions;
using Size = OpenCvSharp.Size;
namespace CvCalibrate
{
public class Calib_Class
{
public Mat ChessBoardMat;
#region 初始化变量
/*内外参数*/
Mat cameraMatrix = new Mat(3, 3, MatType.CV_64FC1, Scalar.All(0)); /* 摄像机内参数矩阵 */
List<int> point_counts = new List<int>(); // 每幅图像中角点的数量
Mat distCoeffs = new Mat(1, 12, MatType.CV_64FC1, Scalar.All(0)); /* 摄像机的5个畸变系数:k1,k2,p1,p2,k3 */ /*加上薄棱镜畸变模型,启用畸变系数S1、S2、S3和S4*/
List<Mat> TranslationMats = new List<Mat>(); /* 每幅图像的旋转向量 */
List<Mat> RotationMats = new List<Mat>(); /* 每幅图像的平移向量 */
/*Mat数据类型转换double的结果*/
public double[,] CameraParameterArray = new double[3, 3];//摄像机内参数矩阵
public double[] DistCoeffsArray = new double[12];//摄像机的5个畸变系数:k1,k2,p1,p2,k3 /*加上薄棱镜畸变模型,启用畸变系数S1、S2、S3和S4*/
public Vec3d[] Rotation; //存放所有图像的3*1旋转向量,每一副图像的旋转向量为一个mat
public Vec3d[] Translation;//存放所有图像的3*1平移向量,每一副图像的平移向量为一个mat
public double MeanError = 0.0; /* 所有图像的平均误差的总和 */
public List<double> TotalError = new List<double>(); /* 每幅图像的平均误差 */
public Size BoardImageSize = new Size();
#endregion
/// (object_points[0]), InputArray.Create(image_points_seq[0]), cameraMatrix, distCoeffs, Rvec, Tvec);
//double[] R = MatToDouble(Rvec);
//double[] T = MatToDouble(Tvec);
Cv2.CalibrationMatrixValues(cameraMatrix, BoardImageSize, 5.3, 7.2, out Fovx, out Fovy, out FocalLength, out Principal, out AspectRatio);
}
else
{
ErrorMessage = "输入图像路径为空!";
return false;
}
return true;
}
private delegate Point2f[] FindCornersDelegate(Mat Src, Size BoardNum, string ErrorMessage);
/// 付费资源,各取所需吧,花了时间和心思做出来的东西让我免费共享是不可能的。
项目资源下载
对了,下载的源码里面有畸变矫正功能的,但是参数那些暂时没设置正确,所以矫正出来的图像似乎没那么准确,有兴趣的朋友可以去研究下,其实所有的代码都是可以参考OpenCv的,只不过是放在了C#下,有些变量类型略有不同,具体怎么样看看它的类就知道了。