尺度不变特征变换(SIFT)特征点检测
一、SIFT算法
1、建立高斯差分尺度空间
由于高斯核是唯一可以产生尺度空间的核,一个图像的尺度空间![]() ,定义为原始图像
,定义为原始图像 与一个尺度可变的高斯函数
与一个尺度可变的高斯函数![]() 的卷积。
的卷积。
二维高斯函数定义:

 表示像素点坐标,表示图像数据,
表示像素点坐标,表示图像数据, 表示尺度因子(高斯正态分布方差),
表示尺度因子(高斯正态分布方差), 表示高斯尺度空间
表示高斯尺度空间
——————————————————————————————————————————
注:其中存在高斯模糊这个概念,通常用于减小图像噪声以及降低细节层次

——————————————————————————————————————————
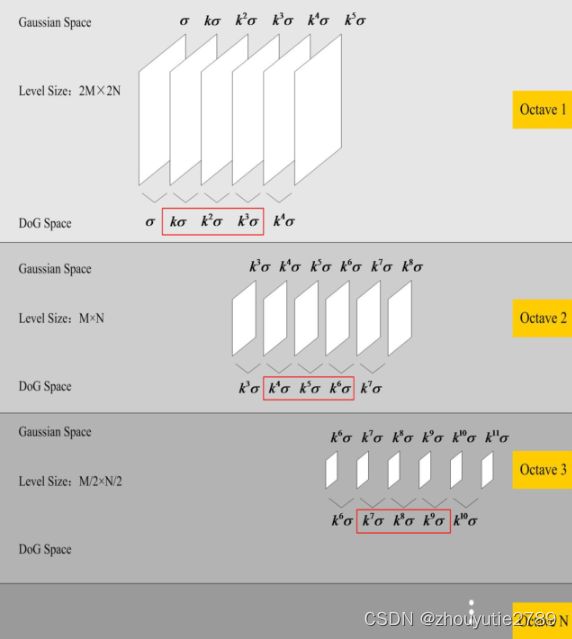
构造图像金字塔
可将高斯金字塔组内和组间尺度归纳为:

i表示金字塔组数,n表示当前组的层数,S表示当前组的层的总数(一半为3~5)

根据下式确定高斯金字塔的组数

M,N表示图像的行数和列数
高斯差分算子定义:


因此得到高斯差分尺度空间,过程如下图:

2、局部极值点检测
为检测出图像高斯差分尺度空间的极值,图像每个像素与其余26个像素进行比较,仅当被检测点为极大(小)值时,保存并进行后续计算。
利用DOG函数在尺度空间的泰勒展开式:

其极值点为![]()
并在计算中对行、列、尺度三个量进行修正,得到:

将修正结果代入DOG函数在尺度空间上的泰勒展开式:

该式能去除那些对比度较低的不稳定的极值点

———————————————————————————————————————————
注意:在极值比较中,每一组的首末两层无法进行极值比较,为满足尺度变化的连续性,在每一组图像的顶层继续用高斯模糊生成了三幅图像,因此高斯金字塔每组有S+3层,DOG金字塔每组有S+2层。下图为不同尺度不同层间极值检测图
———————————————————————————————————————————
3、边缘点剔除
注意:这里我们是提取点,而高斯差分函数在图像的边缘产生较强响应,应剔除边缘点保证算法稳定性和抗噪能力
利用Hessian矩阵消除图像边缘点,Hessian矩阵定义如下:
利用矩阵的行列式和迹,求解出Hessian矩阵的特征值(与Harris角点检测相似)。

其中 ![]() ,当r接近1时表示两个主曲率比较接近,此时可判定该点为一个特征点。为判定r,采用下式:
,当r接近1时表示两个主曲率比较接近,此时可判定该点为一个特征点。为判定r,采用下式:

通常,r<10 判定该点为特征点,r>10的像素点大多是图像边缘像素自动剔除。也就是说只需要判断

上式小于12.1就行
通过尺度不变性求得极值点,可以使描述子具有缩放不变性
4、关键点方向分配
原理:利用关键点邻域像素的梯度方向分布特性,为每个极值点赋予方向,从而使描述子具有旋转不变性
像素点的梯度表示

梯度幅值:

梯度方向:

为确定极值点方向采用梯度直方图统计法,统计以极值点为原点,一定区域内的图像像素点对关键点方向生成所做贡献
——————————————————————————————————————————
梯度直方图
1、直方图以每10度方向为一个柱,共36个,柱代表的方向为像素点的梯度方向,柱的长短代表梯度幅值
2、直方图统计半径为3*1.5*
3、在直方图统计时,每相邻三个像素点采用高斯加权,模板选用[0.25,0.25,0.25],并连续加权两次
4、极值点主方向:极值点周围区域梯度直方图的主峰值就是特征点方向
极值点辅方向:在梯度直方图中,存在另一个相当于主峰值80%能量的峰值时,该方向为极值点的辅方向
这能增强匹配的鲁棒性
——————————————————————————————————————————
方向分配实现步骤:

综上,图像的关键点检测完成,每个关键点有三个信息:位置、尺度、方向;同时这些关键点也拥有了平移、缩放和旋转的不变性。
5、关键点描述
关键点进行描述的原因:该描述子不仅包括关键点,也包括关键点周围对其有贡献的像素点。描述子作为目标匹配的依据,也可使关键点具有更多的特性,比如光照不变性,3D视点变化等。
描述思路:对关键点周围图像分区,计算块内梯度直方图,生成具有独特性的向量(唯一性)
下图为描述子事例,
假设描述子由2*2*8维向量(也就是2*2个8方向直方图)表示,箭头方向代表像素的梯度方向,箭头的长度代表该像素的幅值大小。

经过作者实验得出,描述子采用4*4*8=128维向量表征,效果最好
128维描述子生成步骤:
1、确定计算描述子所需图像区域
描述子区域的半径由下式计算得出:

其中d=4,为关键点所在组的尺度
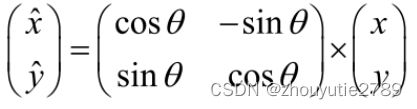
2、将坐标移至关键点主方向
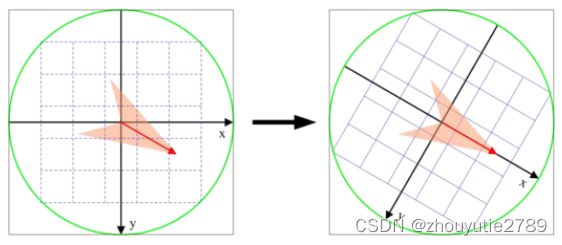
旋转后的新坐标:
3、在图像半径内对每个像素点求其梯度幅值和方向,然后对每个梯度幅值乘以高斯权重参数,形成梯度直方图

其中 表示该像素点与关键点的列距离,
表示该像素点与关键点的列距离, 表示该像素点与关键点的行距离,
表示该像素点与关键点的行距离,![]() 等于描述子窗口宽度(3)乘以直方图列数的一半(2)?
等于描述子窗口宽度(3)乘以直方图列数的一半(2)?
4、在窗口宽度为2*2区域内计算8个方向的梯度直方图,绘制每个梯度方向的累加值,就能形成一个种子点。然后再在下一个2*2区域内进行直方图统计,形成下一个种子点。(由于我们这里描述子采用4*4*8)共生成16个种子点
5、描述子向量元素门限化及门限化后描述子向量规范化
描述子向量元素门限化:方向直方图每个方向上梯度幅值限制在一定门限值(0.2)以下
描述子向量元素规范化:得到的128个描述子向量:![]()
规范化后的向量:![]()
规范化公式:
关键点描述子向量的规范化正是可以去除光照影响,也能解决图像灰度 值整体漂移的问题
6、关键点匹配
分别对参考图像和待配准图像建立描述子集合,通过对比点集内关键点的描述子完成匹配。相似性度量方法采用欧式距离。

这里threshhold代码里取的是0.9
匹配方法1:穷举匹配(耗费时间较长,不采用)
匹配方法2:Kd树
7、消除错误配准点
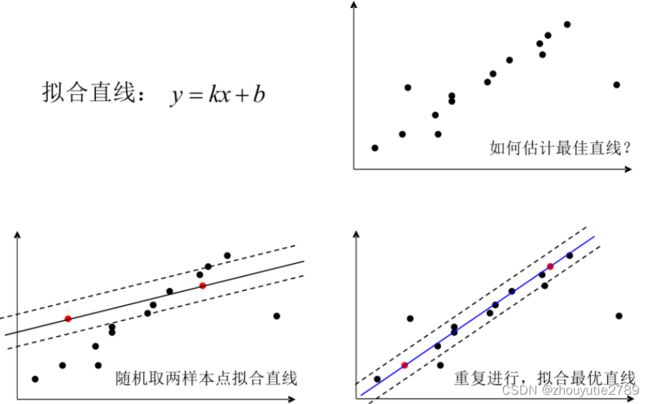
RANSAC(Random Sample Consensus,随机抽样一致):根据具体问题设计得到某个目标函数,然后通过反复提取最小点集估计该函数中参数的初始值,利用初始值把所有的数据分为内点和外点,最后用所有的内点重新计算和估计函数的参数
RANSAC实例:
SIFT实现步骤(根据代码)
(1)读入待配准图像、参考图像
(2)将待配准图像和参考图像转换为灰度图像,同时将途中像素点的数据类型转换成浮点型数据
(3)定义一些常用的常量,比如sigma(底层图像尺度)、对比度阈值、边缘阈值等
(4)构建参考图高斯金字塔,返回gaussian_pyramid_1(各个尺度的高斯图像,采用高斯模糊实现),gaussian_gradient_1(高斯图像金字塔梯度),gaussian_angle_1(高斯金字塔的方向)。他们的size都是7*6(7层6组)
(5)构造参考图DOG金字塔,得到dog_pyramid_1(大小为7*5)
(6)对参考图进行极值点检测,剔除图像边界点,筛选出区域内极大/小值点;计算出前一步所得极值点的偏移量;剔除偏差大的极值点;剔除不稳定的极值点;剔除不在该层该层图像区域内的极值点(x、y、);剔除边缘点。同时为得到极值点方向,用梯度直方图calculate_oritation_hist,得到key_point_array_1(x、y、Octaves、layer、xi、size、angle、gradient)
(7)对参考图生成描述子,可采用DOG或GLOH或GLOJH-like.以DOG为例,每个极值点采用4*4*8维描述子描述。首先确定描述子区域;将坐标转换为关键点主方向;图像半径内对每个像素点求其梯度幅值和方向,然后对每个梯度幅值乘以高斯权重参数,形成梯度直方图;在窗口宽度为4*4区域内计算8个方向的梯度直方图,绘制每个梯度方向的累加值,就能形成一个种子点;再描述子规范化及门限化。得到参考图关键点描述子descriptors_1和locs_1(y、x、size、angle、gradient、Octaves、layer)
(8)对待配准图像重复上述(4)-(7)步骤
(9)配准。采用欧式距离的方法进行相似性度量,当最近邻距离/次近邻距离<0.9时,判定为匹配点;采用unique进行对比,删除重复点对;
*确定匹配点后,必须对参考图像和待配准图像之间的最佳模型参数进行求解
重复迭代求解出模型参数后,得到solution(大小为3*3矩阵),rmse(均方根误差)、cor1(参考图像关键点信息,包括x,y,组,层,尺度,角度)、cor2(待配准图关键点信息)
(10)图像融合。首先定义融合图像,大小为(3*M,3*N,3);采用makeform创建待配准图的投影变换结构 tform,并据二维空间变换结构tform对待配准图像image_1进行二维空间变换;对image_2也同理,得到fusion_image;最后删除多余区域,得到最后融合图像。
二、SIFT应用领域
物体识别
机器人定位及导航
图像拼接
三维建模
手势识别
视频跟踪
笔迹鉴定
指纹及人脸识别
三、SIFT算法的改进
PCA-SIFT:通过PCA降维,有效化简SIFT的128维描述子
CSIFT:彩色尺度特征不变变换,可针对彩色图像进行图像的不变特征提取
SURF:

ASIFT:抗仿射SIFT变换,两个向量空间之间的一个仿射变换(放射映射)由一个线性变换+一个平移组成,该方法能抵抗强仿射情况,且提取的特征点远多于SIFT算法