CBAM注意力机制及pytorch实现
简述
本文提出了卷积注意力模块,这是一种用于前馈卷积神经网络的简单而有效的注意力模块.Convolutional Block Attention Module (CBAM) 表示卷积模块的注意力机制模块,是一种结合了空间(spatial)和通道(channel)的注意力机制模块。相比于senet只关注通道(channel)的注意力机制可以取得更好的效果。
实现过程
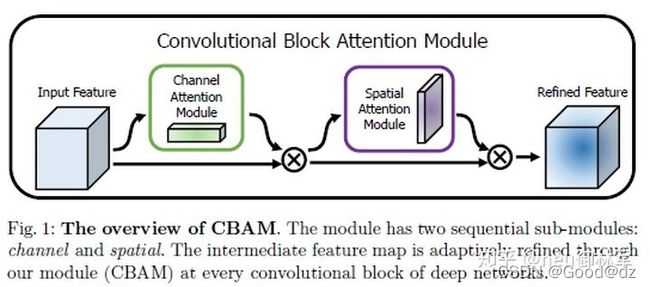
上图给出了添加CBAM模块之后的整体结构。可以看到的是,卷积层输出的结果,会先通过一个通道注意力模块,得到加权结果之后,会再经过一个空间注意力模块,最终进行加权得到结果。

通道注意力模块如上图图一所示.将输入的特征图,分别经过基于width和height的global max pooling和global average pooling,然后分别经过MLP.将MLP输出的特征进行基于element-wise的加和操作,再经过sigmoid激活操作,生成最终的channel attention featuremap。将该channel attention featuremap和input featuremap做elementwise乘法操作,生成Spatial attention模块需要的输入特征。以上是通道注意力机制的步骤。
换一个角度考虑,通道注意力机制(Channel Attention Module)是将特征图在空间维度上进行压缩,得到一个一维矢量后再进行操作。在空间维度上进行压缩时,不仅考虑到了平均值池化(Average Pooling)还考虑了最大值池化(Max Pooling)。平均池化和最大池化可用来聚合特征映射的空间信息,送到一个共享网络,压缩输入特征图的空间维数,逐元素求和合并,以产生通道注意力图。单就一张图来说,通道注意力,关注的是这张图上哪些内容是有重要作用的。平均值池化对特征图上的每一个像素点都有反馈,而最大值池化在进行梯度反向传播计算时,只有特征图中响应最大的地方有梯度的反馈。通道注意力机制可以表达为:

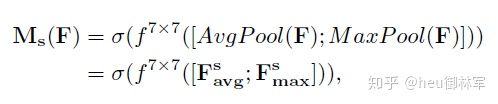
空间注意力模块如上图子图2所示。将Channel attention模块输出的特征图作为本模块的输入特征图。首先做一个基于channel的global max pooling 和global average pooling,然后将这2个结果基于channel 做concat操作。然后经过一个卷积操作,降维为1个channel。再经过sigmoid生成spatial attention feature。最后将该feature和该模块的输入feature做乘法,得到最终生成的特征。
同样,空间注意力机制(Spatial Attention Module)是对通道进行压缩,在通道维度分别进行了平均值池化和最大值池化。MaxPool的操作就是在通道上提取最大值,提取的次数是高乘以宽;AvgPool的操作就是在通道上提取平均值,提取的次数也是是高乘以宽;接着将前面所提取到的特征图(通道数都为1)合并得到一个2通道的特征图。
对于输入的特征图,CBAM模块会沿着两个独立的维度(通道和空间)依次推断注意力图,然后将将注意力图与输入的特征图相乘以进行自适应特征优化.
优势:
由于CBAM是轻量级的通用模块,因此可以忽略该模块的开销,且无缝集成到任何CNN架构中,并可以与基础CNN一起进行端到段的训练.
代码实现
"""
Author: yida
Time is: 2021/11/21 11:40
this Code: 实现CBAM模块
"""
import os
import torch
import torch.nn as nn
os.environ["KMP_DUPLICATE_LIB_OK"] = "TRUE"
class CBAM(nn.Module):
def __init__(self, in_channel):
super(CBAM, self).__init__()
self.Cam = ChannelAttentionModul(in_channel=in_channel) # 通道注意力模块
self.Sam = SpatialAttentionModul(in_channel=in_channel) # 空间注意力模块
def forward(self, x):
x = self.Cam(x)
x = self.Sam(x)
return x
class ChannelAttentionModul(nn.Module): # 通道注意力模块
def __init__(self, in_channel, r=0.5): # channel为输入的维度, r为全连接层缩放比例->控制中间层个数
super(ChannelAttentionModul, self).__init__()
# 全局最大池化
self.MaxPool = nn.AdaptiveMaxPool2d(1)
self.fc_MaxPool = nn.Sequential(
nn.Linear(in_channel, int(in_channel * r)), # int(channel * r)取整数, 中间层神经元数至少为1, 如有必要可设为向上取整
nn.ReLU(),
nn.Linear(int(in_channel * r), in_channel),
nn.Sigmoid(),
)
# 全局均值池化
self.AvgPool = nn.AdaptiveAvgPool2d(1)
self.fc_AvgPool = nn.Sequential(
nn.Linear(in_channel, int(in_channel * r)), # int(channel * r)取整数, 中间层神经元数至少为1, 如有必要可设为向上取整
nn.ReLU(),
nn.Linear(int(in_channel * r), in_channel),
nn.Sigmoid(),
)
# 激活函数
self.sigmoid = nn.Sigmoid()
def forward(self, x):
# 1.最大池化分支
max_branch = self.MaxPool(x)
# 送入MLP全连接神经网络, 得到权重
max_in = max_branch.view(max_branch.size(0), -1)
max_weight = self.fc_MaxPool(max_in)
# 2.全局池化分支
avg_branch = self.AvgPool(x)
# 送入MLP全连接神经网络, 得到权重
avg_in = avg_branch.view(avg_branch.size(0), -1)
avg_weight = self.fc_AvgPool(avg_in)
# MaxPool + AvgPool 激活后得到权重weight
weight = max_weight + avg_weight
weight = self.sigmoid(weight)
# 将维度为b, c的weight, reshape成b, c, 1, 1 与 输入x 相乘
h, w = weight.shape
# 通道注意力Mc
Mc = torch.reshape(weight, (h, w, 1, 1))
# 乘积获得结果
x = Mc * x
return x
class SpatialAttentionModul(nn.Module): # 空间注意力模块
def __init__(self, in_channel):
super(SpatialAttentionModul, self).__init__()
self.conv = nn.Conv2d(2, 1, 7, padding=3)
self.sigmoid = nn.Sigmoid()
def forward(self, x):
# x维度为 [N, C, H, W] 沿着维度C进行操作, 所以dim=1, 结果为[N, H, W]
MaxPool = torch.max(x, dim=1).values # torch.max 返回的是索引和value, 要用.values去访问值才行!
AvgPool = torch.mean(x, dim=1)
# 增加维度, 变成 [N, 1, H, W]
MaxPool = torch.unsqueeze(MaxPool, dim=1)
AvgPool = torch.unsqueeze(AvgPool, dim=1)
# 维度拼接 [N, 2, H, W]
x_cat = torch.cat((MaxPool, AvgPool), dim=1) # 获得特征图
# 卷积操作得到空间注意力结果
x_out = self.conv(x_cat)
Ms = self.sigmoid(x_out)
# 与原图通道进行乘积
x = Ms * x
return x
if __name__ == '__main__':
inputs = torch.randn(10, 100, 224, 224)
model = CBAM(in_channel=100) # CBAM模块, 可以插入CNN及任意网络中, 输入特征图in_channel的维度
print(model)
outputs = model(inputs)
print("输入维度:", inputs.shape)
print("输出维度:", outputs.shape)
验证
通过在ImageNet-1k,MS COCO检测和VOC 2007检测数据集上进行的广泛实验来验证CBAM。 实验表明,使用该模块在各种模型上,并在分类和检测性能方面的持续改进,证明了CBAM的广泛适用性。