Nuscenes数据集总结(上)
一. 简介
nuScenes 数据集是由Motional(前身为 nuTonomy)团队开发的自动驾驶公共大规模数据集。在波士顿和新加坡收集了 1000 个驾驶场景.
nuScenes 数据集的灵感来自开创性的KITTI数据集。nuScenes 是第一个提供来自自动驾驶汽车的整个传感器套件(6 个摄像头、1 个激光雷达、5 个雷达、GPS、IMU)的数据的大规模数据集。与 KITTI 相比,nuScenes 包含 7 倍以上的对象注释。
二.数据采集
1.场景规划
在波士顿和新加坡收集了大约 15 小时的驾驶数据。对于完整的 nuScenes 数据集,发布了来自波士顿海港和新加坡 One North、皇后镇和荷兰村地区的数据。

2.汽车设置
使用两辆具有相同传感器布局的雷诺 Zoe汽车在波士顿和新加坡行驶。数据是从研究平台收集。

相机(CAM)有六个,分别分布在前方(Front)、右前方(Front Right)、左前方(Front Left)、后方(Back)、右后方(Back Right)、左后方(Back Left);激光雷达(LIDAR)有1个,放置在车顶(TOP);毫米波雷达有五个,分别放置在前方(Front)、右前方(Front Right)、左前方(Front Left)、右后方(Back Right)、左后方(Back Left)。
三.数据集的下载
1.到Nuscenes数据集的官网进行下载,下载地址戳这里
2.没有账户的小伙伴可以注册一下,因为下载数据集得有账户,然后选择这个mini版的即可

四.数据集的使用
1.导入nuscenes-devkit库
pip install nuscenes-devkit
2.加载数据集信息
from nuscenes.nuscenes import NuScenes
nusc = NuScenes(version='v1.0-mini', dataroot='数据集的具体路径', verbose=True)

3.场景scene
使用如下代码,查看当前数据集中所有的场景
nusc.list_scenes()

使用如下代码查看具体某个场景的信息
my_scene = nusc.scene[0]
print(my_scene)
![]()
4.样本sample
每个scene大约持续20s,那sample就是每0.5秒进行一次采样。也可以这样理解sample和scene,sence相当于20s的视频,sample就是每0.5s取一帧的图像。
使用如下代码,获取具体场景的具体的一个sample的token值
first_sample_token = my_scene['first_sample_token'] #获取第一个sample的token值
print(first_sample_token)

使用如下代码,通过sample的token值获取sample的具体信息
my_sample = nusc.get('sample', first_sample_token)
print(my_sample)
![]()
5.样本数据 sample_data
可视化前方的毫米波雷达传感器
通过如下代码,获取sample的data数据
print(my_sample['data'])
![]()
(1)获取具体sample中的具体传感器的信息
sensor_radar = 'RADAR_FRONT' #这里选择的传感器为前方的毫米波雷达传感器
radar_front_data = nusc.get('sample_data',my_sample['data'][sensor_radar])
print(radar_front_data)
(2)通过传感器信息的token值进行可视化
nusc.render_sample_data(radar_front_data['token'])

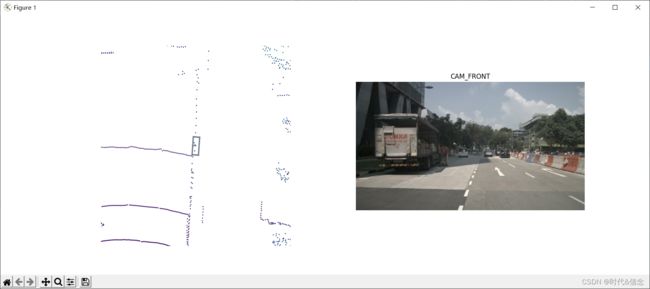
可视化前方的相机
# 可视化前方的相机
sensor_CAM_FRONT = 'CAM_FRONT' #这里选择的传感器为前方的毫米波雷达传感器
CAM_FRONT_data = nusc.get('sample_data', my_sample['data'][sensor_CAM_FRONT])
print(CAM_FRONT_data)
nusc.render_sample_data(CAM_FRONT_data['token'])

可视化顶部激光雷达
# 可视化顶部激光雷达
sensor_LIDAR_TOP = 'LIDAR_TOP' #这里选择的传感器为前方的毫米波雷达传感器
LIDAR_TOP_data = nusc.get('sample_data', my_sample['data'][sensor_LIDAR_TOP])
print(LIDAR_TOP_data)
nusc.render_sample_data(LIDAR_TOP_data['token'])

可视化其他传感器也是同样的方式!!!
6.样本标注 sample_annotation
在sample_data中已经展示了传感器采集到的信息,这一部分将展示样本标注的信息,方法与之前是类似的。
(1)获取sample的标注数据,然后输出相关信息
my_annotation_token = my_sample['anns'][18]
my_annotation_metadata = nusc.get('sample_annotation',my_annotation_token)
my_annotation_metadata
(2)通过sample标注信息的token值,进行可视化
# 获取特定sample的标注信息
my_annotation_token = my_sample['anns'][18]
my_annotation_metadata = nusc.get('sample_annotation', my_annotation_token)
print(my_annotation_metadata)
# 可视化
nusc.render_annotation(my_annotation_metadata['token'])
time.sleep(3)

7.实例 instance
通过nusc.instance[0]获取具体的实例,instance表示某个实例对象,例如一辆汽车
# 获取某个实例对象,并输出其信息
my_instance = nusc.instance[5]
print(my_instance)
# 通过实例的token值,进行可视化
instance_token = my_instance['token']
nusc.render_instance(instance_token)
time.sleep(3)

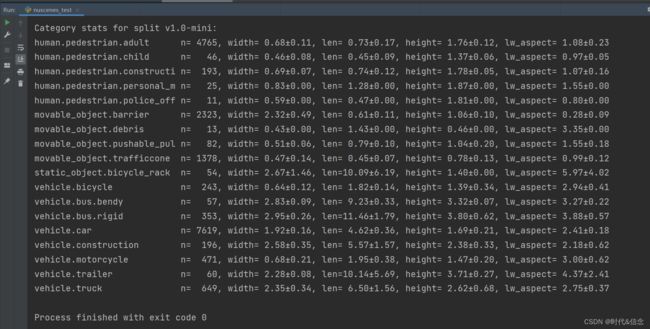
8.类别categories
使用如下代码展示数据集中所有的种类
nusc.list_categories()
9.属性attributes
通过如下代码展示数据集的具体属性
nusc.list_attributes()

10.可视化 visibility
# 选取当前sample标注信息中的一个token值
anntoken = my_sample['anns'][9]
nusc.render_annotation(anntoken)
time.sleep(3)
11.传感器sensor
通过下面代码展示数据集中传感器信息
print(nusc.sensor)

12.校准传感器 calibrated_sensor
通过下面代码获取传感器的校准信息
# 展示传感器的校准信息
sensor_token = nusc.calibrated_sensor[0]
print(sensor_token)

13.车辆姿态 ego_pose
通过下面代码获取车辆姿态信息
# 车辆姿态ego_pose信息
print(nusc.ego_pose[0])

14.日志 log
通过下面代码获取日志信息
# 日志信息
print(nusc.log[0])

15.地图 map
# 地图信息
print(nusc.map[0])
![]()
本文主要参考:https://blog.csdn.net/qq_47233366/article/details/123450282?spm=1001.2101.3001.6650.1&utm_medium=distribute.pc_relevant.none-task-blog-2%7Edefault%7ECTRLIST%7Edefault-1-123450282-blog-125823828.pc_relevant_default&depth_1-utm_source=distribute.pc_relevant.none-task-blog-2%7Edefault%7ECTRLIST%7Edefault-1-123450282-blog-125823828.pc_relevant_default&utm_relevant_index=2