动手学深度学习Task05
Task05
1.卷积神经网络基础
用一个边缘检测的例子来说明卷积过程:
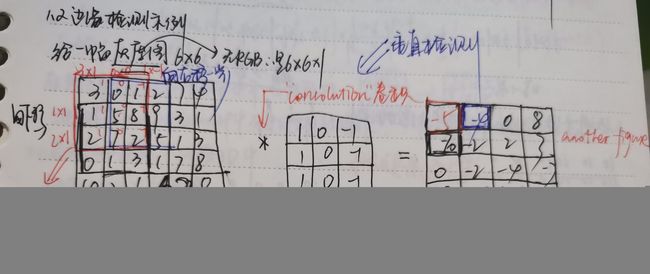
给定的filter在输入图像上进行平移,每移动到一个位置上就把filter和input重合位置上的两个像素值相乘,再把该位置上所有的乘积加和,得到一个新的数值,作为输出output对应位置的一个像素,由此也可以得到维度计算公式如下:
(nh,kh)×(nw,kw)=(nh-kh+1,nw-kw+1)
二维卷积层
二维互相关(cross-correlation)运算的输入是一个二维输入数组和一个二维核(kernel)数组,输出也是一个二维数组,其中核数组通常称为卷积核或过滤器(filter)。卷积核的尺寸通常小于输入数组,卷积核在输入数组上滑动,在每个位置上,卷积核与该位置处的输入子数组按元素相乘并求和,得到输出数组中相应位置的元素。

用corr2d函数实现二维互相关运算,它接受输入数组X与核数组K,并输出数组Y。
import torch
import torch.nn as nn
def corr2d(X, K):
H, W = X.shape
h, w = K.shape
Y = torch.zeros(H - h + 1, W - w + 1)
for i in range(Y.shape[0]):
for j in range(Y.shape[1]):
Y[i, j] = (X[i: i + h, j: j + w] * K).sum()
return Y
二维卷积层
将输入和卷积核做互相关运算,并加上一个标量偏置来得到输出。卷积层的模型参数包括卷积核和标量偏置。
class Conv2D(nn.Module):
def __init__(self, kernel_size):
super(Conv2D, self).__init__()
self.weight = nn.Parameter(torch.randn(kernel_size))
self.bias = nn.Parameter(torch.randn(1))
def forward(self, x):
return corr2d(x, self.weight) + self.bias
一个边缘检测的例子:使用一个1×2的卷积层来识别图像X的颜色边缘。构造一个6×8的图像X,以及它对应的6×7的标签Y,如下程序所示,可以看到X有两个边缘。(0代表黑,1代表白)
X = torch.ones(6, 8)
Y = torch.zeros(6, 7)
X[:, 2: 6] = 0
Y[:, 1] = 1
Y[:, 5] = -1
print(X)
print(Y)
out:
tensor([[1., 1., 0., 0., 0., 0., 1., 1.],
[1., 1., 0., 0., 0., 0., 1., 1.],
[1., 1., 0., 0., 0., 0., 1., 1.],
[1., 1., 0., 0., 0., 0., 1., 1.],
[1., 1., 0., 0., 0., 0., 1., 1.],
[1., 1., 0., 0., 0., 0., 1., 1.]])
tensor([[ 0., 1., 0., 0., 0., -1., 0.],
[ 0., 1., 0., 0., 0., -1., 0.],
[ 0., 1., 0., 0., 0., -1., 0.],
[ 0., 1., 0., 0., 0., -1., 0.],
[ 0., 1., 0., 0., 0., -1., 0.],
[ 0., 1., 0., 0., 0., -1., 0.]])
下面利用卷积层进行边缘检测:
conv2d = Conv2D(kernel_size=(1, 2))
step = 30
lr = 0.01
for i in range(step):
Y_hat = conv2d(X)
l = ((Y_hat - Y) ** 2).sum()
l.backward()
# 梯度下降
conv2d.weight.data -= lr * conv2d.weight.grad
conv2d.bias.data -= lr * conv2d.bias.grad
# 梯度清零
conv2d.weight.grad.zero_()
conv2d.bias.grad.zero_()
if (i + 1) % 5 == 0:
print('Step %d, loss %.3f' % (i + 1, l.item()))
print(conv2d.weight.data)
print(conv2d.bias.data)
out:
Step 5, loss 4.569
Step 10, loss 0.949
Step 15, loss 0.228
Step 20, loss 0.060
Step 25, loss 0.016
Step 30, loss 0.004
tensor([[ 1.0161, -1.0177]])
tensor([0.0009])
互相关运算与卷积运算
卷积层得名于卷积运算,但卷积层中用到的并非卷积运算而是互相关运算。我们将核数组上下翻转、左右翻转,再与输入数组做互相关运算,这一过程就是卷积运算。由于卷积层的核数组是可学习的,所以使用互相关运算与使用卷积运算并无本质区别。
特征图与感受野
二维卷积层输出的二维数组可以看作是输入在空间维度(宽和高)上某一级的表征,也叫特征图(feature map)。影响元素x的前向计算的所有可能输入区域(可能大于输入的实际尺寸)叫做x的感受野(receptive field)。
以上文输入为3×3、核为2×2的卷积为例,输入中阴影部分的四个元素是输出中阴影部分元素的感受野。我们将图中形状为2×2的输出记为Y,将Y与另一个形状2*2为的核数组做互相关运算,输出单个元素z。那么,z在Y上的感受野包括Y的全部四个元素,在输入上的感受野包括其中全部9个元素。可见,我们可以通过更深的卷积神经网络使特征图中单个元素的感受野变得更加广阔,从而捕捉输入上更大尺寸的特征。
填充和步幅
我们介绍卷积层的两个超参数,即填充padding和步幅step,它们可以对给定形状的输入和卷积核改变输出形状。
填充
填充(padding)是指在输入高和宽的两侧填充元素(通常是0元素),图2里我们在原输入高和宽的两侧分别添加了值为0的元素。
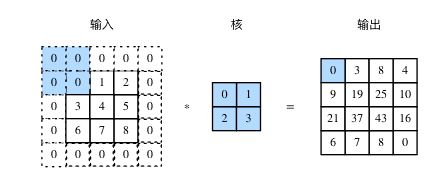
这样卷积维度计算的公式就发生了变化,设填充的行数和列数分别为ph和pw。
原来:(nh,kh)×(nw,kw)=(nh-kh+1,nw-kw+1)
现在:(nh,kh)×(nw,kw)=(nh+2ph-kh+1,nw+2pw-kw+1)
步幅
在互相关运算中,卷积核在输入数组上滑动,每次滑动的行数与列数即是步幅(stride)。此前我们使用的步幅都是1,图3展示了在高上步幅为3、在宽上步幅为2的二维互相关运算。
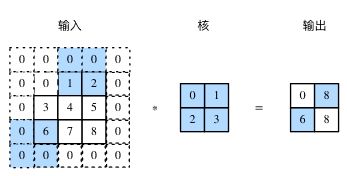
卷积维度计算的公式再次发生了变化,设在行和列上滑动的步幅分别为sh和sw。
原来:(nh,kh)×(nw,kw)=(nh+2ph-kh+1,nw+2pw-kw+1)
现在:(nh,kh)×(nw,kw)=((nh+2ph-kh)/sh+1,(nw+2pw-kw)/sw+1)
多输入通道和多输出通道
之前的输入和输出都是二维数组,但真实数据的维度经常更高。例如,彩色图像在高和宽2个维度外还有RGB(红、绿、蓝)3个颜色通道。假设彩色图像的高和宽分别是h和w(像素),那么它可以表示为一个3×h×w的多维数组,我们将大小为3的这一维称为通道(channel)维。
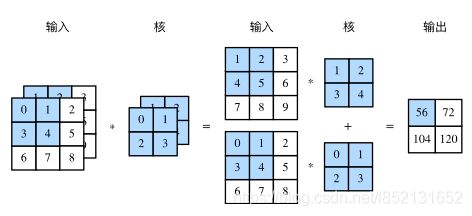
多输入通道
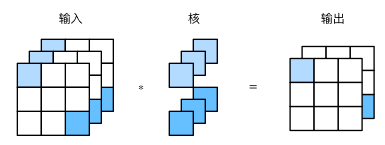
卷积层的输入可以包含多个通道,下图展示了一个含2个输入通道的二维互相关计算的例子。
多输出通道
卷积层的输出也可以包含多个通道,下图展示了一个含2个输出通道的二维互相关计算的例子。
卷积层与全连接层的对比
二维卷积层经常用于处理图像,与此前的全连接层相比,它主要有两个优势:
一是全连接层把图像展平成一个向量,在输入图像上相邻的元素可能因为展平操作不再相邻,网络难以捕捉局部信息。而卷积层的设计,天然地具有提取局部信息的能力。
二是卷积层的参数量更少!全连接层将所有参数平铺进行连接,参数量非常大,而通过卷积层的维度计算可以看出卷积运算的参数量较小。
卷积层的简洁实现
使用Pytorch中的nn.Conv2d类来实现二维卷积层。假定输入X为一个四维张量,也就是除了二维h和w外,X的通道数为2,则filter的通道数也为2;设定输出通道数为3,则共有3组filter;设定filter的尺寸为3*5,步长step为1,进行padding(1,2)填充,即行和列的填充数分别为1和2。
X = torch.rand(4, 2, 3, 5)
print(X.shape)
conv2d = nn.Conv2d(in_channels=2, out_channels=3, kernel_size=(3, 5), stride=1, padding=(1, 2))
Y = conv2d(X)
print('Y.shape: ', Y.shape)
print('weight.shape: ', conv2d.weight.shape)
print('bias.shape: ', conv2d.bias.shape)
out:
torch.Size([4, 2, 3, 5])
Y.shape: torch.Size([4, 3, 3, 5])
weight.shape: torch.Size([3, 2, 3, 5])
bias.shape: torch.Size([3])
池化
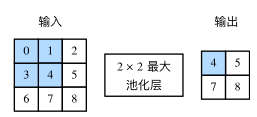
池化层主要用于缓解卷积层对位置的过度敏感性。同卷积层一样,池化层每次对输入数据的一个固定形状窗口(又称池化窗口)中的元素计算输出,池化层直接计算池化窗口内元素的最大值或者平均值,该运算也分别叫做最大池化或平均池化。下图展示了池化窗口形状为2*2的最大池化。
池化层也可以在输入的高和宽两侧填充并调整窗口的移动步幅来改变输出形状。池化层填充和步幅与卷积层填充和步幅的工作机制一样。
注:在处理多通道输入数据时,池化层对每个输入通道分别池化,但不会像卷积层那样将各通道的结果按通道相加。这意味着池化层的输出通道数与输入通道数相等。
池化层的简洁实现
使用Pytorch中的nn.MaxPool2d实现最大池化层。
X = torch.arange(32, dtype=torch.float32).view(1, 2, 4, 4)
pool2d = nn.MaxPool2d(kernel_size=3, padding=1, stride=(2, 1))
Y = pool2d(X)
print(X)
print(Y)
out:
tensor([[[[ 0., 1., 2., 3.],
[ 4., 5., 6., 7.],
[ 8., 9., 10., 11.],
[12., 13., 14., 15.]],
[[16., 17., 18., 19.],
[20., 21., 22., 23.],
[24., 25., 26., 27.],
[28., 29., 30., 31.]]]])
tensor([[[[ 5., 6., 7., 7.],
[13., 14., 15., 15.]],
[[21., 22., 23., 23.],
[29., 30., 31., 31.]]]])
平均池化层使用的是nn.AvgPool2d,使用方法与nn.MaxPool2d相同。
2.leNet
Convolutional Neural Networks
使用全连接层的局限性:
1)图像在同一列邻近的像素在这个向量中可能相距较远。它们构成的模式可能难以被模型识别。
2)对于大尺寸的输入图像,使用全连接层容易导致模型过大。
使用卷积层的优势:
1)卷积层保留输入形状。
2)卷积层通过滑动窗口将同一卷积核与不同位置的输入重复计算,从而避免参数尺寸过大
leNet是对CNN的一种具体的应用,分为卷积层块和全连接层块两个部分。
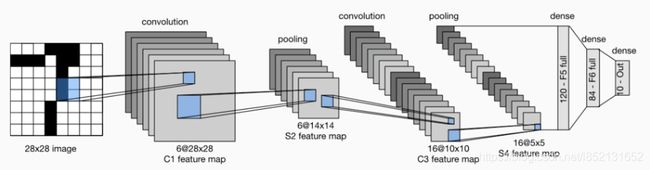
使用fashion-mnist数据集,输入为28×28的图片,经过卷积、平均池化、卷积、平均池化、全连接、全连接、全连接,最后输出10种分类。
卷积层块里的基本单位是卷积层后接平均池化层:卷积层用来识别图像里的空间模式,如线条和物体局部,之后的平均池化层则用来降低卷积层对位置的敏感性。卷积层块由两个这样的基本单位重复堆叠构成。在卷积层块中,每个卷积层都使用5×5的窗口,并在输出上使用sigmoid激活函数。第一个卷积层输出通道数为6,第二个卷积层输出通道数则增加到16,通道数增多是因为随着卷积,图片的尺寸缩小,为了保留更多的特征信息,可以使通道数增大。
全连接层块含3个全连接层。它们的输出个数分别是120、84和10,最后一层为10是因为输出的类别个数为10。
下面通过Sequential类来实现LeNet模型。
#import
import sys
sys.path.append("/home/kesci/input")
import d2lzh1981 as d2l
import torch
import torch.nn as nn
import torch.optim as optim
import time
#net
class Flatten(torch.nn.Module): #展平操作
def forward(self, x):
return x.view(x.shape[0], -1)
class Reshape(torch.nn.Module): #将图像大小重定型
def forward(self, x):
return x.view(-1,1,28,28) #(B x C x H x W)
net = torch.nn.Sequential( #Lelet
Reshape(),
nn.Conv2d(in_channels=1, out_channels=6, kernel_size=5, padding=2), #b*1*28*28 =>b*6*28*28
nn.Sigmoid(),
nn.AvgPool2d(kernel_size=2, stride=2), #b*6*28*28 =>b*6*14*14
nn.Conv2d(in_channels=6, out_channels=16, kernel_size=5), #b*6*14*14 =>b*16*10*10
nn.Sigmoid(),
nn.AvgPool2d(kernel_size=2, stride=2), #b*16*10*10 => b*16*5*5
Flatten(), #b*16*5*5 => b*400
nn.Linear(in_features=16*5*5, out_features=120),
nn.Sigmoid(),
nn.Linear(120, 84),
nn.Sigmoid(),
nn.Linear(84, 10)
)
可以看到Sequential与上面描述的一致,首先将输入X进行reshape,即展平并重新定形,增加一个维度(增加的维度代表batch size)。
第一层卷积层的输入通道数为1,输出通道数为6,核尺寸为5,padding为2,输入(batch×1×28×28),根据公式有,尺寸为28+4-5+1=28,则输出为(batch×6×28×28);经过sigmod函数后,平均池化层核尺寸为2,stride为2,则尺寸变成了(28-2=26/2=13+1=14),即输出为(6×14×14);第二层卷积输入通道数为6,输出通道数为16,核尺寸为5,padding为0,则输出为(batch×16×10×10);经过sigmod函数,第二层平均池化层核尺寸为2,stride为2,输出变为((batch×16×5×5);将其展开成(b×400),经过第一层线性全连接层,输入特征400,输出特征120;经过sigmod函数,经过第二层线性全连接层,输入特征120,输出特征84;经过sigmod函数,经过第三层线性全连接层,输入特征84,输出特征10,即为最后的输出类别数。
可以构造一个28×28的单通道数据样本测试一下:
print
X = torch.randn(size=(1,1,28,28), dtype = torch.float32)
for layer in net:
X = layer(X)
print(layer.__class__.__name__,'output shape: \t',X.shape)
Reshape output shape: torch.Size([1, 1, 28, 28])
Conv2d output shape: torch.Size([1, 6, 28, 28])
Sigmoid output shape: torch.Size([1, 6, 28, 28])
AvgPool2d output shape: torch.Size([1, 6, 14, 14])
Conv2d output shape: torch.Size([1, 16, 10, 10])
Sigmoid output shape: torch.Size([1, 16, 10, 10])
AvgPool2d output shape: torch.Size([1, 16, 5, 5])
Flatten output shape: torch.Size([1, 400])
Linear output shape: torch.Size([1, 120])
Sigmoid output shape: torch.Size([1, 120])
Linear output shape: torch.Size([1, 84])
Sigmoid output shape: torch.Size([1, 84])
Linear output shape: torch.Size([1, 10])
可以看到,在卷积层块中输入的高和宽在逐层减小。卷积层由于使用高和宽均为5的卷积核,从而将高和宽分别减小4,而池化层则将高和宽减半,但通道数则从1增加到16。全连接层则逐层减少输出个数,直到变成图像的类别数10,和理论一致。

接下来使用Fashion-MNIST进行实验。
首先获取数据和训练模型。
# 数据
batch_size = 256
train_iter, test_iter = d2l.load_data_fashion_mnist(
batch_size=batch_size, root='/home/kesci/input/FashionMNIST2065')
print(len(train_iter))
out:25
编写图像输出函数。
#数据展示
import matplotlib.pyplot as plt
def show_fashion_mnist(images, labels):
d2l.use_svg_display()
# 这里的_表示我们忽略(不使用)的变量
_, figs = plt.subplots(1, len(images), figsize=(12, 12))
for f, img, lbl in zip(figs, images, labels):
f.imshow(img.view((28, 28)).numpy())
f.set_title(lbl)
f.axes.get_xaxis().set_visible(False)
f.axes.get_yaxis().set_visible(False)
plt.show()
for Xdata,ylabel in train_iter:
break
X, y = [], []
for i in range(10):
print(Xdata[i].shape,ylabel[i].numpy())
X.append(Xdata[i]) # 将第i个feature加到X中
y.append(ylabel[i].numpy()) # 将第i个label加到y中
show_fashion_mnist(X, y)
输出可以看到读出图像的尺寸、标签以及图像。
因为卷积神经网络计算比多层感知机要复杂,建议使用GPU来加速计算。我们查看看是否可以用GPU,如果成功则使用cuda:0,否则仍然使用cpu。
# This function has been saved in the d2l package for future use
#use GPU
def try_gpu():
"""If GPU is available, return torch.device as cuda:0; else return torch.device as cpu."""
if torch.cuda.is_available():
device = torch.device('cuda:0')
else:
device = torch.device('cpu')
return device
device = try_gpu()
device
out:device(type=‘cpu’)
实现evaluate_accuracy函数,用于计算模型net在数据集data_iter上的准确率。
#计算准确率
'''
(1). net.train()
启用 BatchNormalization 和 Dropout,将BatchNormalization和Dropout置为True
(2). net.eval()
不启用 BatchNormalization 和 Dropout,将BatchNormalization和Dropout置为False
'''
def evaluate_accuracy(data_iter, net,device=torch.device('cpu')):
"""Evaluate accuracy of a model on the given data set."""
acc_sum,n = torch.tensor([0],dtype=torch.float32,device=device),0
for X,y in data_iter:
# If device is the GPU, copy the data to the GPU.
X,y = X.to(device),y.to(device)
net.eval()
with torch.no_grad():
y = y.long()
acc_sum += torch.sum((torch.argmax(net(X), dim=1) == y)) #[[0.2 ,0.4 ,0.5 ,0.6 ,0.8] ,[ 0.1,0.2 ,0.4 ,0.3 ,0.1]] => [ 4 , 2 ]
n += y.shape[0]
return acc_sum.item()/n
定义函数train_ch5,用于训练模型。
#训练函数
def train_ch5(net, train_iter, test_iter,criterion, num_epochs, batch_size, device,lr=None):
"""Train and evaluate a model with CPU or GPU."""
print('training on', device)
net.to(device)
optimizer = optim.SGD(net.parameters(), lr=lr)
for epoch in range(num_epochs):
train_l_sum = torch.tensor([0.0],dtype=torch.float32,device=device)
train_acc_sum = torch.tensor([0.0],dtype=torch.float32,device=device)
n, start = 0, time.time()
for X, y in train_iter:
net.train()
optimizer.zero_grad()
X,y = X.to(device),y.to(device)
y_hat = net(X)
loss = criterion(y_hat, y)
loss.backward()
optimizer.step()
with torch.no_grad():
y = y.long()
train_l_sum += loss.float()
train_acc_sum += (torch.sum((torch.argmax(y_hat, dim=1) == y))).float()
n += y.shape[0]
test_acc = evaluate_accuracy(test_iter, net,device)
print('epoch %d, loss %.4f, train acc %.3f, test acc %.3f, '
'time %.1f sec'
% (epoch + 1, train_l_sum/n, train_acc_sum/n, test_acc,
time.time() - start))
重新将模型参数初始化到对应的设备device(cpu or cuda:0)之上,并使用Xavier随机初始化。损失函数和训练算法则依然使用交叉熵损失函数和小批量随机梯度下降。
# 训练
lr, num_epochs = 0.9, 10
def init_weights(m):
if type(m) == nn.Linear or type(m) == nn.Conv2d:
torch.nn.init.xavier_uniform_(m.weight)
net.apply(init_weights)
net = net.to(device)
criterion = nn.CrossEntropyLoss() #交叉熵描述了两个概率分布之间的距离,交叉熵越小说明两者之间越接近
train_ch5(net, train_iter, test_iter, criterion,num_epochs, batch_size,device, lr)
training on cpu
epoch 1, loss 0.0091, train acc 0.100, test acc 0.168, time 21.6 sec
epoch 2, loss 0.0065, train acc 0.355, test acc 0.599, time 21.5 sec
epoch 3, loss 0.0035, train acc 0.651, test acc 0.665, time 21.8 sec
epoch 4, loss 0.0028, train acc 0.717, test acc 0.723, time 21.7 sec
epoch 5, loss 0.0025, train acc 0.746, test acc 0.753, time 21.4 sec
epoch 6, loss 0.0023, train acc 0.767, test acc 0.754, time 21.5 sec
epoch 7, loss 0.0022, train acc 0.782, test acc 0.785, time 21.3 sec
epoch 8, loss 0.0021, train acc 0.798, test acc 0.791, time 21.8 sec
epoch 9, loss 0.0019, train acc 0.811, test acc 0.790, time 22.0 sec
epoch 10, loss 0.0019, train acc 0.821, test acc 0.804, time 22.1 sec
在这里可以看一下前十个预测和实际的标签对比:
# test
for testdata,testlabe in test_iter:
testdata,testlabe = testdata.to(device),testlabe.to(device)
break
print(testdata.shape,testlabe.shape)
net.eval()
y_pre = net(testdata)
print(torch.argmax(y_pre,dim=1)[:10])
print(testlabe[:10])
torch.Size([256, 1, 28, 28]) torch.Size([256])
tensor([9, 2, 1, 1, 6, 1, 2, 6, 5, 7])
tensor([9, 2, 1, 1, 6, 1, 4, 6, 5, 7])
总结:
卷积神经网络就是含卷积层的网络。 LeNet交替使用卷积层和最大池化层后接全连接层来进行图像分类。
3.卷积神经网络进阶
LeNet: 在大的真实数据集上的表现并不尽如⼈意。
1.神经网络计算复杂。
2.还没有⼤量深⼊研究参数初始化和⾮凸优化算法等诸多领域。
机器学习的特征提取:手工定义的特征提取函数
神经网络的特征提取:通过学习得到数据的多级表征,并逐级表⽰越来越抽象的概念或模式。
神经网络发展的限制:数据、硬件
AlexNet
首次证明了学习到的特征可以超越⼿⼯设计的特征,从而⼀举打破计算机视觉研究的前状。
特征:
8层变换,其中有5层卷积和2层全连接隐藏层,以及1个全连接输出层。
将sigmoid激活函数改成了更加简单的ReLU激活函数。
用Dropout来控制全连接层的模型复杂度。
引入数据增强,如翻转、裁剪和颜色变化,从而进一步扩大数据集来缓解过拟合。
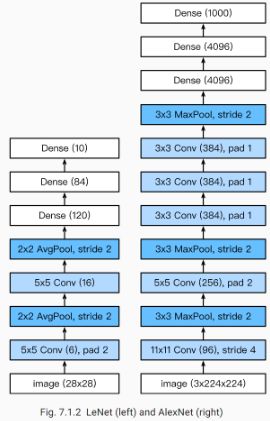
AlexNet的结构为:输入→卷积层→最大池化层→卷积层→最大池化层→卷积层→卷积层→最大池化层→全连接层→全连接→层全连接层→输出。代码如下:
#目前GPU算力资源预计17日上线,在此之前本代码只能使用CPU运行。
#考虑到本代码中的模型过大,CPU训练较慢,
#我们还将代码上传了一份到 https://www.kaggle.com/boyuai/boyu-d2l-modernconvolutionalnetwork
#如希望提前使用gpu运行请至kaggle。
import time
import torch
from torch import nn, optim
import torchvision
import numpy as np
import sys
sys.path.append("/home/kesci/input/")
import d2lzh1981 as d2l
import os
import torch.nn.functional as F
device = torch.device('cuda' if torch.cuda.is_available() else 'cpu')
class AlexNet(nn.Module):
def __init__(self):
super(AlexNet, self).__init__()
self.conv = nn.Sequential(
nn.Conv2d(1, 96, 11, 4), # in_channels, out_channels, kernel_size, stride, padding
nn.ReLU(),
nn.MaxPool2d(3, 2), # kernel_size, stride
# 减小卷积窗口,使用填充为2来使得输入与输出的高和宽一致,且增大输出通道数
nn.Conv2d(96, 256, 5, 1, 2),
nn.ReLU(),
nn.MaxPool2d(3, 2),
# 连续3个卷积层,且使用更小的卷积窗口。除了最后的卷积层外,进一步增大了输出通道数。
# 前两个卷积层后不使用池化层来减小输入的高和宽
nn.Conv2d(256, 384, 3, 1, 1),
nn.ReLU(),
nn.Conv2d(384, 384, 3, 1, 1),
nn.ReLU(),
nn.Conv2d(384, 256, 3, 1, 1),
nn.ReLU(),
nn.MaxPool2d(3, 2)
)
# 这里全连接层的输出个数比LeNet中的大数倍。使用丢弃层来缓解过拟合
self.fc = nn.Sequential(
nn.Linear(256*5*5, 4096),
nn.ReLU(),
nn.Dropout(0.5),
#由于使用CPU镜像,精简网络,若为GPU镜像可添加该层
#nn.Linear(4096, 4096),
#nn.ReLU(),
#nn.Dropout(0.5),
# 输出层。由于这里使用Fashion-MNIST,所以用类别数为10,而非论文中的1000
nn.Linear(4096, 10),
)
def forward(self, img):
feature = self.conv(img)
output = self.fc(feature.view(img.shape[0], -1))
return output
按照上面的结构建立Sequential,使用Fashion-MNIST数据集,第一层是卷积层,输入通道数为1,输出通道数为96,核尺寸为11,步幅为4,padding为0,经过ReLU函数,第二层最大池化层核尺寸为3,步幅为2,第三层是卷积层,输入通道数为96,输出通道数为256,核尺寸为5,步幅为1,padding为2,经过ReLU函数,第四层最大池化层核尺寸为3,步幅为2,第五层是卷积层,输入通道数为256,输出通道数为384,核尺寸为3,步幅为1,padding为1,经过ReLU函数,第六层是卷积层,输入通道数为384,输出通道数为384,核尺寸为3,步幅为1,padding为1,经过ReLU函数,第七层是卷积层,输入通道数为384,输出通道数为256,核尺寸为3,步幅为1,padding为1,经过ReLU函数,第八层最大池化层核尺寸为3,步幅为2;第八层的输出作为第一层全连接层的输入,根据公式推算,最后一层池化层的输出为256×5×5,则全连接层是输入参数为256×5×5,输出设为4096,经过ReLU函数,并使用Dropout来控制全连接层的模型复杂度,设定Dropout概率为0.5,再设定一层(4096,4096)的全连接层,经过ReLU函数,Dropout,最后再通过(4096,10)的全连接层,最后一层输出为10是因为数据集最后的分类数为10。
测试一下:
net = AlexNet()
print(net)
AlexNet(
(conv): Sequential(
(0): Conv2d(1, 96, kernel_size=(11, 11), stride=(4, 4))
(1): ReLU()
(2): MaxPool2d(kernel_size=3, stride=2, padding=0, dilation=1, ceil_mode=False)
(3): Conv2d(96, 256, kernel_size=(5, 5), stride=(1, 1), padding=(2, 2))
(4): ReLU()
(5): MaxPool2d(kernel_size=3, stride=2, padding=0, dilation=1, ceil_mode=False)
(6): Conv2d(256, 384, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1))
(7): ReLU()
(8): Conv2d(384, 384, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1))
(9): ReLU()
(10): Conv2d(384, 256, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1))
(11): ReLU()
(12): MaxPool2d(kernel_size=3, stride=2, padding=0, dilation=1, ceil_mode=False)
)
(fc): Sequential(
(0): Linear(in_features=6400, out_features=4096, bias=True)
(1): ReLU()
(2): Dropout(p=0.5, inplace=False)
(3): Linear(in_features=4096, out_features=10, bias=True)
)
)载入数据集:
# 本函数已保存在d2lzh_pytorch包中方便以后使用
def load_data_fashion_mnist(batch_size, resize=None, root='/home/kesci/input/FashionMNIST2065'):
"""Download the fashion mnist dataset and then load into memory."""
trans = []
if resize:
trans.append(torchvision.transforms.Resize(size=resize))
trans.append(torchvision.transforms.ToTensor())
transform = torchvision.transforms.Compose(trans)
mnist_train = torchvision.datasets.FashionMNIST(root=root, train=True, download=True, transform=transform)
mnist_test = torchvision.datasets.FashionMNIST(root=root, train=False, download=True, transform=transform)
train_iter = torch.utils.data.DataLoader(mnist_train, batch_size=batch_size, shuffle=True, num_workers=2)
test_iter = torch.utils.data.DataLoader(mnist_test, batch_size=batch_size, shuffle=False, num_workers=2)
return train_iter, test_iter
#batchsize=128
batch_size = 16
# 如出现“out of memory”的报错信息,可减小batch_size或resize
train_iter, test_iter = load_data_fashion_mnist(batch_size,224)
for X, Y in train_iter:
print('X =', X.shape,
'\nY =', Y.type(torch.int32))
break
X = torch.Size([16, 1, 224, 224])
Y = tensor([5, 2, 9, 3, 1, 8, 3, 3, 2, 6, 1, 6, 2, 4, 4, 8], dtype=torch.int32)
设定batch size为16,可以看到数据尺寸为(1,224,224),并且可以看到取出的16批次的图片的标签。
进行训练:
lr, num_epochs = 0.001, 3
optimizer = torch.optim.Adam(net.parameters(), lr=lr)
d2l.train_ch5(net, train_iter, test_iter, batch_size, optimizer, device, num_epochs)
使用重复元素的网络(VGG)
AlexNet有一个缺点就是不易修改结构,而VGG则可以通过重复使⽤简单的基础块来构建深度模型。
Block:数个相同的填充为1、窗口形状为 3×3 的卷积层,接上一个步幅为2、窗口形状为 2×2 的最大池化层。
卷积层保持输入的高和宽不变,而池化层则对其减半。
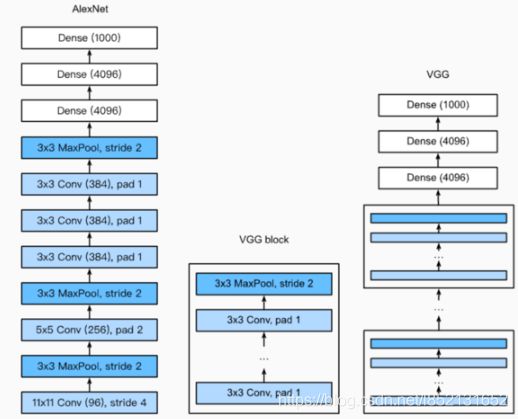
注意在使用时,第一个VGG模块的第一层卷积层需要对通道数进行改变,由于设定pad为1,core size为3,因此后面的卷积层没有再改变通道数;最大池化层的步幅设定为2,经过五个vggblock会使其宽高减半五次,因此设定让输出通道数由1到64、128、256、512、512逐渐增高,目的是通过更多通道数保留更多的特征。vgg模块的主要参数包括卷积层个数、输入通道数以及输出通道数。另外可以看到卷积层具体实现代码如下:
def vgg_block(num_convs, in_channels, out_channels): #卷积层个数,输入通道数,输出通道数
blk = []
for i in range(num_convs):
if i == 0:
blk.append(nn.Conv2d(in_channels, out_channels, kernel_size=3, padding=1))
else:
blk.append(nn.Conv2d(out_channels, out_channels, kernel_size=3, padding=1))
blk.append(nn.ReLU())
blk.append(nn.MaxPool2d(kernel_size=2, stride=2)) # 这里会使宽高减半
return nn.Sequential(*blk)
conv_arch = ((1, 1, 64), (1, 64, 128), (2, 128, 256), (2, 256, 512), (2, 512, 512))
# 经过5个vgg_block, 宽高会减半5次, 变成 224/32 = 7
fc_features = 512 * 7 * 7 # c * w * h
fc_hidden_units = 4096 # 任意
def vgg(conv_arch, fc_features, fc_hidden_units=4096):
net = nn.Sequential()
# 卷积层部分
for i, (num_convs, in_channels, out_channels) in enumerate(conv_arch):
# 每经过一个vgg_block都会使宽高减半
net.add_module("vgg_block_" + str(i+1), vgg_block(num_convs, in_channels, out_channels))
# 全连接层部分
net.add_module("fc", nn.Sequential(d2l.FlattenLayer(),
nn.Linear(fc_features, fc_hidden_units),
nn.ReLU(),
nn.Dropout(0.5),
nn.Linear(fc_hidden_units, fc_hidden_units),
nn.ReLU(),
nn.Dropout(0.5),
nn.Linear(fc_hidden_units, 10)
))
return net
net = vgg(conv_arch, fc_features, fc_hidden_units)
X = torch.rand(1, 1, 224, 224)
# named_children获取一级子模块及其名字(named_modules会返回所有子模块,包括子模块的子模块)
for name, blk in net.named_children():
X = blk(X)
print(name, 'output shape: ', X.shape)
vgg_block_1 output shape: torch.Size([1, 64, 112, 112])
vgg_block_2 output shape: torch.Size([1, 128, 56, 56])
vgg_block_3 output shape: torch.Size([1, 256, 28, 28])
vgg_block_4 output shape: torch.Size([1, 512, 14, 14])
vgg_block_5 output shape: torch.Size([1, 512, 7, 7])
fc output shape: torch.Size([1, 10])
在这里我们采用的数据集像素较小,防止出现过拟合,不需要那么多的通道数来保留特征,因此将通道数除以8,如果用像素较大、需要保留特征较多的数据集,可以不用除以8。
ratio = 8
small_conv_arch = [(1, 1, 64//ratio), (1, 64//ratio, 128//ratio), (2, 128//ratio, 256//ratio),
(2, 256//ratio, 512//ratio), (2, 512//ratio, 512//ratio)]
net = vgg(small_conv_arch, fc_features // ratio, fc_hidden_units // ratio)
print(net)
Sequential(
(vgg_block_1): Sequential(
(0): Conv2d(1, 8, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1))
(1): ReLU()
(2): MaxPool2d(kernel_size=2, stride=2, padding=0, dilation=1, ceil_mode=False)
)
(vgg_block_2): Sequential(
(0): Conv2d(8, 16, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1))
(1): ReLU()
(2): MaxPool2d(kernel_size=2, stride=2, padding=0, dilation=1, ceil_mode=False)
)
(vgg_block_3): Sequential(
(0): Conv2d(16, 32, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1))
(1): ReLU()
(2): Conv2d(32, 32, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1))
(3): ReLU()
(4): MaxPool2d(kernel_size=2, stride=2, padding=0, dilation=1, ceil_mode=False)
)
(vgg_block_4): Sequential(
(0): Conv2d(32, 64, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1))
(1): ReLU()
(2): Conv2d(64, 64, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1))
(3): ReLU()
(4): MaxPool2d(kernel_size=2, stride=2, padding=0, dilation=1, ceil_mode=False)
)
(vgg_block_5): Sequential(
(0): Conv2d(64, 64, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1))
(1): ReLU()
(2): Conv2d(64, 64, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1))
(3): ReLU()
(4): MaxPool2d(kernel_size=2, stride=2, padding=0, dilation=1, ceil_mode=False)
)
(fc): Sequential(
(0): FlattenLayer()
(1): Linear(in_features=3136, out_features=512, bias=True)
(2): ReLU()
(3): Dropout(p=0.5, inplace=False)
(4): Linear(in_features=512, out_features=512, bias=True)
(5): ReLU()
(6): Dropout(p=0.5, inplace=False)
(7): Linear(in_features=512, out_features=10, bias=True)
)
)
训练一下:
batchsize=16
#batch_size = 64
# 如出现“out of memory”的报错信息,可减小batch_size或resize
# train_iter, test_iter = d2l.load_data_fashion_mnist(batch_size, resize=224)
lr, num_epochs = 0.001, 5
optimizer = torch.optim.Adam(net.parameters(), lr=lr)
d2l.train_ch5(net, train_iter, test_iter, batch_size, optimizer, device, num_epochs)
⽹络中的⽹络(NiN)
LeNet、AlexNet和VGG:先以由卷积层构成的模块充分抽取 空间特征,再以由全连接层构成的模块来输出分类结果。
NiN:串联多个由卷积层和“全连接”层构成的小⽹络来构建⼀个深层⽹络。
⽤了输出通道数等于标签类别数的NiN块,然后使⽤全局平均池化层对每个通道中所有元素求平均并直接⽤于分类。

1×1卷积核作用
1.放缩通道数:通过控制卷积核的数量达到通道数的放缩。
2.增加非线性。1×1卷积核的卷积过程相当于全连接层的计算过程,并且还加入了非线性激活函数,从而可以增加网络的非线性。
3.计算参数少
代码如下:
def nin_block(in_channels, out_channels, kernel_size, stride, padding):
blk = nn.Sequential(nn.Conv2d(in_channels, out_channels, kernel_size, stride, padding),
nn.ReLU(),
nn.Conv2d(out_channels, out_channels, kernel_size=1),
nn.ReLU(),
nn.Conv2d(out_channels, out_channels, kernel_size=1),
nn.ReLU())
return blk
# 已保存在d2lzh_pytorch
class GlobalAvgPool2d(nn.Module):
# 全局平均池化层可通过将池化窗口形状设置成输入的高和宽实现
def __init__(self):
super(GlobalAvgPool2d, self).__init__()
def forward(self, x):
return F.avg_pool2d(x, kernel_size=x.size()[2:])
net = nn.Sequential(
nin_block(1, 96, kernel_size=11, stride=4, padding=0),
nn.MaxPool2d(kernel_size=3, stride=2),
nin_block(96, 256, kernel_size=5, stride=1, padding=2),
nn.MaxPool2d(kernel_size=3, stride=2),
nin_block(256, 384, kernel_size=3, stride=1, padding=1),
nn.MaxPool2d(kernel_size=3, stride=2),
nn.Dropout(0.5),
# 标签类别数是10
nin_block(384, 10, kernel_size=3, stride=1, padding=1),
GlobalAvgPool2d(),
# 将四维的输出转成二维的输出,其形状为(批量大小, 10)
d2l.FlattenLayer())
测试一下:
X = torch.rand(1, 1, 224, 224)
for name, blk in net.named_children():
X = blk(X)
print(name, 'output shape: ', X.shape)
0 output shape: torch.Size([1, 96, 54, 54])
1 output shape: torch.Size([1, 96, 26, 26])
2 output shape: torch.Size([1, 256, 26, 26])
3 output shape: torch.Size([1, 256, 12, 12])
4 output shape: torch.Size([1, 384, 12, 12])
5 output shape: torch.Size([1, 384, 5, 5])
6 output shape: torch.Size([1, 384, 5, 5])
7 output shape: torch.Size([1, 10, 5, 5])
8 output shape: torch.Size([1, 10, 1, 1])
9 output shape: torch.Size([1, 10])
进行训练:
batch_size = 128
# 如出现“out of memory”的报错信息,可减小batch_size或resize
#train_iter, test_iter = d2l.load_data_fashion_mnist(batch_size, resize=224)
lr, num_epochs = 0.002, 5
optimizer = torch.optim.Adam(net.parameters(), lr=lr)
d2l.train_ch5(net, train_iter, test_iter, batch_size, optimizer, device, num_epochs)
NiN重复使⽤由卷积层和代替全连接层的1×1卷积层构成的NiN块来构建深层⽹络。
NiN去除了容易造成过拟合的全连接输出层,而是将其替换成输出通道数等于标签类别数 的NiN块和全局平均池化层。
NiN的以上设计思想影响了后⾯⼀系列卷积神经⽹络的设计。
GoogLeNet
1)由Inception基础块组成。
2)Inception块相当于⼀个有4条线路的⼦⽹络。它通过不同窗口形状的卷积层和最⼤池化层来并⾏抽取信息,并使⽤1×1卷积层减少通道数从而降低模型复杂度。
3)可以⾃定义的超参数是每个层的输出通道数,我们以此来控制模型复杂度。
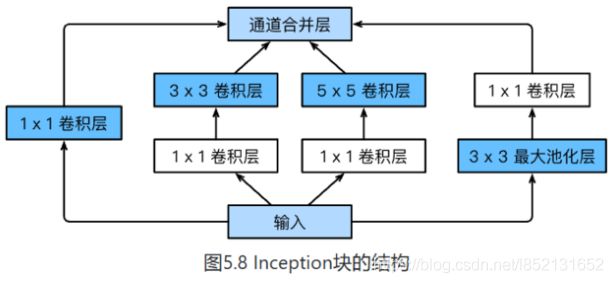
Inception块是将四个线路的输出通道拼接在一起来实现的,下面的代码是四个线路构建以及将它们拼接在一起的过程。
class Inception(nn.Module):
# c1 - c4为每条线路里的层的输出通道数
def __init__(self, in_c, c1, c2, c3, c4):
super(Inception, self).__init__()
# 线路1,单1 x 1卷积层
self.p1_1 = nn.Conv2d(in_c, c1, kernel_size=1)
# 线路2,1 x 1卷积层后接3 x 3卷积层
self.p2_1 = nn.Conv2d(in_c, c2[0], kernel_size=1)
self.p2_2 = nn.Conv2d(c2[0], c2[1], kernel_size=3, padding=1)
# 线路3,1 x 1卷积层后接5 x 5卷积层
self.p3_1 = nn.Conv2d(in_c, c3[0], kernel_size=1)
self.p3_2 = nn.Conv2d(c3[0], c3[1], kernel_size=5, padding=2)
# 线路4,3 x 3最大池化层后接1 x 1卷积层
self.p4_1 = nn.MaxPool2d(kernel_size=3, stride=1, padding=1)
self.p4_2 = nn.Conv2d(in_c, c4, kernel_size=1)
def forward(self, x):
p1 = F.relu(self.p1_1(x))
p2 = F.relu(self.p2_2(F.relu(self.p2_1(x))))
p3 = F.relu(self.p3_2(F.relu(self.p3_1(x))))
p4 = F.relu(self.p4_2(self.p4_1(x)))
return torch.cat((p1, p2, p3, p4), dim=1) # 在通道维上连结输出
完整GoogLeNet模型:
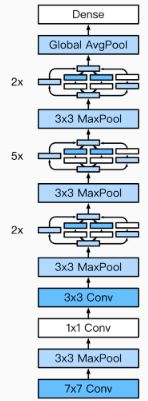
过程和上面类似,因此不再赘述:
b1 = nn.Sequential(nn.Conv2d(1, 64, kernel_size=7, stride=2, padding=3),
nn.ReLU(),
nn.MaxPool2d(kernel_size=3, stride=2, padding=1))
b2 = nn.Sequential(nn.Conv2d(64, 64, kernel_size=1),
nn.Conv2d(64, 192, kernel_size=3, padding=1),
nn.MaxPool2d(kernel_size=3, stride=2, padding=1))
b3 = nn.Sequential(Inception(192, 64, (96, 128), (16, 32), 32),
Inception(256, 128, (128, 192), (32, 96), 64),
nn.MaxPool2d(kernel_size=3, stride=2, padding=1))
b4 = nn.Sequential(Inception(480, 192, (96, 208), (16, 48), 64),
Inception(512, 160, (112, 224), (24, 64), 64),
Inception(512, 128, (128, 256), (24, 64), 64),
Inception(512, 112, (144, 288), (32, 64), 64),
Inception(528, 256, (160, 320), (32, 128), 128),
nn.MaxPool2d(kernel_size=3, stride=2, padding=1))
b5 = nn.Sequential(Inception(832, 256, (160, 320), (32, 128), 128),
Inception(832, 384, (192, 384), (48, 128), 128),
d2l.GlobalAvgPool2d())
net = nn.Sequential(b1, b2, b3, b4, b5,
d2l.FlattenLayer(), nn.Linear(1024, 10))
net = nn.Sequential(b1, b2, b3, b4, b5, d2l.FlattenLayer(), nn.Linear(1024, 10))
X = torch.rand(1, 1, 96, 96)
for blk in net.children():
X = blk(X)
print('output shape: ', X.shape)
#batchsize=128
batch_size = 16
# 如出现“out of memory”的报错信息,可减小batch_size或resize
#train_iter, test_iter = d2l.load_data_fashion_mnist(batch_size, resize=96)
lr, num_epochs = 0.001, 5
optimizer = torch.optim.Adam(net.parameters(), lr=lr)
d2l.train_ch5(net, train_iter, test_iter, batch_size, optimizer, device, num_epochs)