基于mediapipe和KNN算法的深蹲/引体向上计数检测【mediapipe】【BlazePose】【KNN邻接算法】
深蹲/引体向上计数检测
- 前言
-
- 一、什么是mediapipe
- 二、什么是BlazePose
- 三、KNN算法
- 四、软件环境
- 五、参考文档
- 一、代码实现
- 二、可能出现的问题
-
- 一、字体问题
- 二、upper_body_only=False
- 三、plt.legend(loc='upper right')
- 四、class_name问题
- 四、最终效果
- 五、总结
前言
一、什么是mediapipe
MediaPipe是一个用于构建机器学习管道的框架,用于处理视频、音频等时间序列数据。这个跨平台框架适用于桌面/服务器、Android、iOS和嵌入式设备,如Raspberry Pi和Jetson Nano。mediapipe很多常用的AI功能它都支持,举几个常用的例子:
人脸检测
FaceMesh: 从图像/视频中重建出人脸的3D Mesh,可以用于AR渲染
人像分割: 从图像/视频中把人分割出来,可用于视频会议,像Zoom/钉钉都有这样的功能
手势跟踪:可以标出21个关键点的3D坐标
人体姿态估计: 可以给出33个关键点的3D坐标
头发上色:可以把头发检测出来,并图上颜色
本文章将讲解使用mediapipe中的姿势分类来实现深蹲/引体向上计数检测
二、什么是BlazePose
BlazePose可以启用的应用程序之一是健身。更具体地说 - 姿势分类和重复计数。在本节中,我们将提供有关在 Colabs 的帮助下构建自定义姿势分类器的基本指导,并将其包装在 ML Kit 快速入门应用中的简单健身演示中。俯卧撑和深蹲用于演示目的,作为最常见的练习。
三、KNN算法
邻接算法,或 K近邻分类算法(kNN,k-NearestNeighbor)是数据挖掘中最简单的分类方法之一。称 K近邻,是表示最近邻居 k的近邻,表示每一个样本都能以其最接近 k的邻居表示。K-近邻算法(KNN)算法实现简单、高效。在分类、回归、模式识别等方面有着广泛的应用
四、软件环境
本项目在jupyter notebook开发环境下进行开发,在win10操作系统中python3.7的带有摄像头的PC机上运行。mediapipe的版本为0.8.10
在我之前的博客里有关于环境配置的讲解。点击进入
五、参考文档
https://google.github.io/mediapipe/solutions/pose_classification.html
一、代码实现
from matplotlib import pyplot as plt
import os
def show_image(img, figsize=(10, 10)):
"""Shows output PIL image."""
plt.figure(figsize=figsize)
plt.imshow(img)
plt.show()
#人体姿态编码
class FullBodyPoseEmbedder(object):
"""Converts 3D pose landmarks into 3D embedding."""
def __init__(self, torso_size_multiplier=2.5):
# Multiplier to apply to the torso to get minimal body size.
self._torso_size_multiplier = torso_size_multiplier
# Names of the landmarks as they appear in the prediction.
self._landmark_names = [
'nose',
'left_eye_inner', 'left_eye', 'left_eye_outer',
'right_eye_inner', 'right_eye', 'right_eye_outer',
'left_ear', 'right_ear',
'mouth_left', 'mouth_right',
'left_shoulder', 'right_shoulder',
'left_elbow', 'right_elbow',
'left_wrist', 'right_wrist',
'left_pinky_1', 'right_pinky_1',
'left_index_1', 'right_index_1',
'left_thumb_2', 'right_thumb_2',
'left_hip', 'right_hip',
'left_knee', 'right_knee',
'left_ankle', 'right_ankle',
'left_heel', 'right_heel',
'left_foot_index', 'right_foot_index',
]
def __call__(self, landmarks):
"""Normalizes pose landmarks and converts to embedding
Args:
landmarks - NumPy array with 3D landmarks of shape (N, 3).
Result:
Numpy array with pose embedding of shape (M, 3) where `M` is the number of
pairwise distances defined in `_get_pose_distance_embedding`.
"""
assert landmarks.shape[0] == len(self._landmark_names), 'Unexpected number of landmarks: {}'.format(
landmarks.shape[0])
# Get pose landmarks.
landmarks = np.copy(landmarks)
# Normalize landmarks.
landmarks = self._normalize_pose_landmarks(landmarks)
# Get embedding.
embedding = self._get_pose_distance_embedding(landmarks)
return embedding
def _normalize_pose_landmarks(self, landmarks):
"""Normalizes landmarks translation and scale."""
landmarks = np.copy(landmarks)
# Normalize translation.
pose_center = self._get_pose_center(landmarks)
landmarks -= pose_center
# Normalize scale.
pose_size = self._get_pose_size(landmarks, self._torso_size_multiplier)
landmarks /= pose_size
# Multiplication by 100 is not required, but makes it eaasier to debug.
landmarks *= 100
return landmarks
def _get_pose_center(self, landmarks):
"""Calculates pose center as point between hips."""
left_hip = landmarks[self._landmark_names.index('left_hip')]
right_hip = landmarks[self._landmark_names.index('right_hip')]
center = (left_hip + right_hip) * 0.5
return center
def _get_pose_size(self, landmarks, torso_size_multiplier):
"""Calculates pose size.
It is the maximum of two values:
* Torso size multiplied by `torso_size_multiplier`
* Maximum distance from pose center to any pose landmark
"""
# This approach uses only 2D landmarks to compute pose size.
landmarks = landmarks[:, :2]
# Hips center.
left_hip = landmarks[self._landmark_names.index('left_hip')]
right_hip = landmarks[self._landmark_names.index('right_hip')]
hips = (left_hip + right_hip) * 0.5
# Shoulders center.
left_shoulder = landmarks[self._landmark_names.index('left_shoulder')]
right_shoulder = landmarks[self._landmark_names.index('right_shoulder')]
shoulders = (left_shoulder + right_shoulder) * 0.5
# Torso size as the minimum body size.
torso_size = np.linalg.norm(shoulders - hips)
# Max dist to pose center.
pose_center = self._get_pose_center(landmarks)
max_dist = np.max(np.linalg.norm(landmarks - pose_center, axis=1))
return max(torso_size * torso_size_multiplier, max_dist)
def _get_pose_distance_embedding(self, landmarks):
"""Converts pose landmarks into 3D embedding.
We use several pairwise 3D distances to form pose embedding. All distances
include X and Y components with sign. We differnt types of pairs to cover
different pose classes. Feel free to remove some or add new.
Args:
landmarks - NumPy array with 3D landmarks of shape (N, 3).
Result:
Numpy array with pose embedding of shape (M, 3) where `M` is the number of
pairwise distances.
"""
embedding = np.array([
# One joint.
self._get_distance(
self._get_average_by_names(landmarks, 'left_hip', 'right_hip'),
self._get_average_by_names(landmarks, 'left_shoulder', 'right_shoulder')),
self._get_distance_by_names(landmarks, 'left_shoulder', 'left_elbow'),
self._get_distance_by_names(landmarks, 'right_shoulder', 'right_elbow'),
self._get_distance_by_names(landmarks, 'left_elbow', 'left_wrist'),
self._get_distance_by_names(landmarks, 'right_elbow', 'right_wrist'),
self._get_distance_by_names(landmarks, 'left_hip', 'left_knee'),
self._get_distance_by_names(landmarks, 'right_hip', 'right_knee'),
self._get_distance_by_names(landmarks, 'left_knee', 'left_ankle'),
self._get_distance_by_names(landmarks, 'right_knee', 'right_ankle'),
# Two joints.
self._get_distance_by_names(landmarks, 'left_shoulder', 'left_wrist'),
self._get_distance_by_names(landmarks, 'right_shoulder', 'right_wrist'),
self._get_distance_by_names(landmarks, 'left_hip', 'left_ankle'),
self._get_distance_by_names(landmarks, 'right_hip', 'right_ankle'),
# Four joints.
self._get_distance_by_names(landmarks, 'left_hip', 'left_wrist'),
self._get_distance_by_names(landmarks, 'right_hip', 'right_wrist'),
# Five joints.
self._get_distance_by_names(landmarks, 'left_shoulder', 'left_ankle'),
self._get_distance_by_names(landmarks, 'right_shoulder', 'right_ankle'),
self._get_distance_by_names(landmarks, 'left_hip', 'left_wrist'),
self._get_distance_by_names(landmarks, 'right_hip', 'right_wrist'),
# Cross body.
self._get_distance_by_names(landmarks, 'left_elbow', 'right_elbow'),
self._get_distance_by_names(landmarks, 'left_knee', 'right_knee'),
self._get_distance_by_names(landmarks, 'left_wrist', 'right_wrist'),
self._get_distance_by_names(landmarks, 'left_ankle', 'right_ankle'),
# Body bent direction.
# self._get_distance(
# self._get_average_by_names(landmarks, 'left_wrist', 'left_ankle'),
# landmarks[self._landmark_names.index('left_hip')]),
# self._get_distance(
# self._get_average_by_names(landmarks, 'right_wrist', 'right_ankle'),
# landmarks[self._landmark_names.index('right_hip')]),
])
return embedding
def _get_average_by_names(self, landmarks, name_from, name_to):
lmk_from = landmarks[self._landmark_names.index(name_from)]
lmk_to = landmarks[self._landmark_names.index(name_to)]
return (lmk_from + lmk_to) * 0.5
def _get_distance_by_names(self, landmarks, name_from, name_to):
lmk_from = landmarks[self._landmark_names.index(name_from)]
lmk_to = landmarks[self._landmark_names.index(name_to)]
return self._get_distance(lmk_from, lmk_to)
def _get_distance(self, lmk_from, lmk_to):
return lmk_to - lmk_from
人体姿态分类
class PoseSample(object):
def __init__(self, name, landmarks, class_name, embedding):
self.name = name
self.landmarks = landmarks
self.class_name = class_name
self.embedding = embedding
class PoseSampleOutlier(object):
def __init__(self, sample, detected_class, all_classes):
self.sample = sample
self.detected_class = detected_class
self.all_classes = all_classes
import csv
import numpy as np
import os
class PoseClassifier(object):
"""Classifies pose landmarks."""
def __init__(self,
pose_samples_folder,
pose_embedder,
file_extension='csv',
file_separator=',',
n_landmarks=33,
n_dimensions=3,
top_n_by_max_distance=30,
top_n_by_mean_distance=10,
axes_weights=(1., 1., 0.2)):
self._pose_embedder = pose_embedder
self._n_landmarks = n_landmarks
self._n_dimensions = n_dimensions
self._top_n_by_max_distance = top_n_by_max_distance
self._top_n_by_mean_distance = top_n_by_mean_distance
self._axes_weights = axes_weights
self._pose_samples = self._load_pose_samples(pose_samples_folder,
file_extension,
file_separator,
n_landmarks,
n_dimensions,
pose_embedder)
def _load_pose_samples(self,
pose_samples_folder,
file_extension,
file_separator,
n_landmarks,
n_dimensions,
pose_embedder):
"""Loads pose samples from a given folder.
Required folder structure:
neutral_standing.csv
pushups_down.csv
pushups_up.csv
squats_down.csv
...
Required CSV structure:
sample_00001,x1,y1,z1,x2,y2,z2,....
sample_00002,x1,y1,z1,x2,y2,z2,....
...
"""
# Each file in the folder represents one pose class.
file_names = [name for name in os.listdir(pose_samples_folder) if name.endswith(file_extension)]
pose_samples = []
for file_name in file_names:
# Use file name as pose class name.
class_name = file_name[:-(len(file_extension) + 1)]
# Parse CSV.
with open(os.path.join(pose_samples_folder, file_name)) as csv_file:
csv_reader = csv.reader(csv_file, delimiter=file_separator)
for row in csv_reader:
assert len(row) == n_landmarks * n_dimensions + 1, 'Wrong number of values: {}'.format(len(row))
landmarks = np.array(row[1:], np.float32).reshape([n_landmarks, n_dimensions])
pose_samples.append(PoseSample(
name=row[0],
landmarks=landmarks,
class_name=class_name,
embedding=pose_embedder(landmarks),
))
return pose_samples
def find_pose_sample_outliers(self):
"""Classifies each sample against the entire database."""
# Find outliers in target poses
outliers = []
for sample in self._pose_samples:
# Find nearest poses for the target one.
pose_landmarks = sample.landmarks.copy()
pose_classification = self.__call__(pose_landmarks)
class_names = [class_name for class_name, count in pose_classification.items() if count == max(pose_classification.values())]
# Sample is an outlier if nearest poses have different class or more than
# one pose class is detected as nearest.
if sample.class_name not in class_names or len(class_names) != 1:
outliers.append(PoseSampleOutlier(sample,class_names, pose_classification))
return outliers
def __call__(self, pose_landmarks):
"""Classifies given pose.
Classification is done in two stages:
* First we pick top-N samples by MAX distance. It allows to remove samples
that are almost the same as given pose, but has few joints bent in the
other direction.
* Then we pick top-N samples by MEAN distance. After outliers are removed
on a previous step, we can pick samples that are closes on average.
Args:
pose_landmarks: NumPy array with 3D landmarks of shape (N, 3).
Returns:
Dictionary with count of nearest pose samples from the database. Sample:
{
'pushups_down': 8,
'pushups_up': 2,
}
"""
# Check that provided and target poses have the same shape.
assert pose_landmarks.shape == (self._n_landmarks, self._n_dimensions), 'Unexpected shape: {}'.format(pose_landmarks.shape)
# Get given pose embedding.
pose_embedding = self._pose_embedder(pose_landmarks)
flipped_pose_embedding = self._pose_embedder(pose_landmarks * np.array([-1, 1, 1]))
# Filter by max distance.
#
# That helps to remove outliers - poses that are almost the same as the
# given one, but has one joint bent into another direction and actually
# represnt a different pose class.
max_dist_heap = []
for sample_idx, sample in enumerate(self._pose_samples):
max_dist = min(
np.max(np.abs(sample.embedding - pose_embedding) * self._axes_weights),
np.max(np.abs(sample.embedding - flipped_pose_embedding) * self._axes_weights),
)
max_dist_heap.append([max_dist, sample_idx])
max_dist_heap = sorted(max_dist_heap, key=lambda x: x[0])
max_dist_heap = max_dist_heap[:self._top_n_by_max_distance]
# Filter by mean distance.
#
# After removing outliers we can find the nearest pose by mean distance.
mean_dist_heap = []
for _, sample_idx in max_dist_heap:
sample = self._pose_samples[sample_idx]
mean_dist = min(
np.mean(np.abs(sample.embedding - pose_embedding) * self._axes_weights),
np.mean(np.abs(sample.embedding - flipped_pose_embedding) * self._axes_weights),
)
mean_dist_heap.append([mean_dist, sample_idx])
mean_dist_heap = sorted(mean_dist_heap, key=lambda x: x[0])
mean_dist_heap = mean_dist_heap[:self._top_n_by_mean_distance]
# Collect results into map: (class_name -> n_samples)
class_names = [self._pose_samples[sample_idx].class_name for _, sample_idx in mean_dist_heap]
result = {class_name: class_names.count(class_name) for class_name in set(class_names)}
return result
姿态分类结果平滑
#指数移动平均,使图像平滑
class EMADictSmoothing(object):
"""Smoothes pose classification."""
def __init__(self, window_size=10, alpha=0.2):
self._window_size = window_size
self._alpha = alpha
self._data_in_window = []
def __call__(self, data):
"""Smoothes given pose classification.
Smoothing is done by computing Exponential Moving Average for every pose
class observed in the given time window. Missed pose classes arre replaced
with 0.
Args:
data: Dictionary with pose classification. Sample:
{
'pushups_down': 8,
'pushups_up': 2,
}
Result:
Dictionary in the same format but with smoothed and float instead of
integer values. Sample:
{
'pushups_down': 8.3,
'pushups_up': 1.7,
}
"""
# Add new data to the beginning of the window for simpler code.
self._data_in_window.insert(0, data)
self._data_in_window = self._data_in_window[:self._window_size]
# Get all keys.
keys = set([key for data in self._data_in_window for key, _ in data.items()])
# Get smoothed values.
smoothed_data = dict()
for key in keys:
factor = 1.0
top_sum = 0.0
bottom_sum = 0.0
for data in self._data_in_window:
value = data[key] if key in data else 0.0
top_sum += factor * value
bottom_sum += factor
# Update factor.
factor *= (1.0 - self._alpha)
smoothed_data[key] = top_sum / bottom_sum
return smoothed_data
动作计数器,可在下面定义的enter_threshold=6, exit_threshold=4修改上下阈值
class RepetitionCounter(object):
"""Counts number of repetitions of given target pose class."""
def __init__(self, class_name, enter_threshold=6, exit_threshold=4):
self._class_name = class_name
# If pose counter passes given threshold, then we enter the pose.
self._enter_threshold = enter_threshold
self._exit_threshold = exit_threshold
# Either we are in given pose or not.
self._pose_entered = False
# Number of times we exited the pose.
self._n_repeats = 0
@property
def n_repeats(self):
return self._n_repeats
def __call__(self, pose_classification):
"""Counts number of repetitions happend until given frame.
We use two thresholds. First you need to go above the higher one to enter
the pose, and then you need to go below the lower one to exit it. Difference
between the thresholds makes it stable to prediction jittering (which will
cause wrong counts in case of having only one threshold).
Args:
pose_classification: Pose classification dictionary on current frame.
Sample:
{
'pushups_down': 8.3,
'pushups_up': 1.7,
}
Returns:
Integer counter of repetitions.
"""
# Get pose confidence.
pose_confidence = 0.0
if self._class_name in pose_classification:
pose_confidence = pose_classification[self._class_name]
# On the very first frame or if we were out of the pose, just check if we
# entered it on this frame and update the state.
if not self._pose_entered:
self._pose_entered = pose_confidence > self._enter_threshold
return self._n_repeats
# If we were in the pose and are exiting it, then increase the counter and
# update the state.
if pose_confidence < self._exit_threshold:
self._n_repeats += 1
self._pose_entered = False
return self._n_repeats
可视化模块
import io
from PIL import Image
from PIL import ImageFont
from PIL import ImageDraw
import requests
class PoseClassificationVisualizer(object):
"""Keeps track of claassifcations for every frame and renders them."""
def __init__(self,
class_name,
plot_location_x=0.05,
plot_location_y=0.05,
plot_max_width=0.4,
plot_max_height=0.4,
plot_figsize=(9, 4),
plot_x_max=None,
plot_y_max=None,
counter_location_x=0.85,
counter_location_y=0.05,
counter_font_path='https://github.com/googlefonts/roboto/blob/main/src/hinted/Roboto-Regular.ttf?raw=true',
counter_font_color='red',
counter_font_size=0.15):
self._class_name = class_name
self._plot_location_x = plot_location_x
self._plot_location_y = plot_location_y
self._plot_max_width = plot_max_width
self._plot_max_height = plot_max_height
self._plot_figsize = plot_figsize
self._plot_x_max = plot_x_max
self._plot_y_max = plot_y_max
self._counter_location_x = counter_location_x
self._counter_location_y = counter_location_y
self._counter_font_path = counter_font_path
self._counter_font_color = counter_font_color
self._counter_font_size = counter_font_size
self._counter_font = None
self._pose_classification_history = []
self._pose_classification_filtered_history = []
def __call__(self,
frame,
pose_classification,
pose_classification_filtered,
repetitions_count):
"""Renders pose classifcation and counter until given frame."""
# Extend classification history.
self._pose_classification_history.append(pose_classification)
self._pose_classification_filtered_history.append(pose_classification_filtered)
# Output frame with classification plot and counter.
output_img = Image.fromarray(frame)
output_width = output_img.size[0]
output_height = output_img.size[1]
# Draw the plot.
img = self._plot_classification_history(output_width, output_height)
img.thumbnail((int(output_width * self._plot_max_width),
int(output_height * self._plot_max_height)),
Image.ANTIALIAS)
output_img.paste(img,
(int(output_width * self._plot_location_x),
int(output_height * self._plot_location_y)))
# Draw the count.
output_img_draw = ImageDraw.Draw(output_img)
if self._counter_font is None:
font_size = int(output_height * self._counter_font_size)
font_request = requests.get(self._counter_font_path, allow_redirects=True)
self._counter_font = ImageFont.truetype(io.BytesIO(font_request.content), size=font_size)
output_img_draw.text((output_width * self._counter_location_x,
output_height * self._counter_location_y),
str(repetitions_count),
font=self._counter_font,
fill=self._counter_font_color)
return output_img
def _plot_classification_history(self, output_width, output_height):
fig = plt.figure(figsize=self._plot_figsize)
for classification_history in [self._pose_classification_history,
self._pose_classification_filtered_history]:
y = []
for classification in classification_history:
if classification is None:
y.append(None)
elif self._class_name in classification:
y.append(classification[self._class_name])
else:
y.append(0)
plt.plot(y, linewidth=7)
plt.grid(axis='y', alpha=0.75)
plt.xlabel('Frame')
plt.ylabel('Confidence')
plt.title('Classification history for `{}`'.format(self._class_name))
#plt.legend(loc='upper right')
if self._plot_y_max is not None:
plt.ylim(top=self._plot_y_max)
if self._plot_x_max is not None:
plt.xlim(right=self._plot_x_max)
# Convert plot to image.
buf = io.BytesIO()
dpi = min(
output_width * self._plot_max_width / float(self._plot_figsize[0]),
output_height * self._plot_max_height / float(self._plot_figsize[1]))
fig.savefig(buf, dpi=dpi)
buf.seek(0)
img = Image.open(buf)
plt.close()
return img
提取训练集关键点坐标,在谷歌mediapipe文档中的with open(csv_out_path, ‘w’) as csv_out_file:
在运行时会出问题,参考另一个博主的方法,所有的with open改为with open(csv_out_path, ‘w’, newline=‘’) as csv_out_file:
如下代码已修改
import cv2
from matplotlib import pyplot as plt
import numpy as np
import os
from PIL import Image
import sys
import tqdm
from mediapipe.python.solutions import drawing_utils as mp_drawing
from mediapipe.python.solutions import pose as mp_pose
class BootstrapHelper(object):
"""Helps to bootstrap images and filter pose samples for classification."""
def __init__(self,
images_in_folder,
images_out_folder,
csvs_out_folder):
self._images_in_folder = images_in_folder
self._images_out_folder = images_out_folder
self._csvs_out_folder = csvs_out_folder
# Get list of pose classes and print image statistics.
self._pose_class_names = sorted([n for n in os.listdir(self._images_in_folder) if not n.startswith('.')])
def bootstrap(self, per_pose_class_limit=None):
"""Bootstraps images in a given folder.
Required image in folder (same use for image out folder):
pushups_up/
image_001.jpg
image_002.jpg
...
pushups_down/
image_001.jpg
image_002.jpg
...
...
Produced CSVs out folder:
pushups_up.csv
pushups_down.csv
Produced CSV structure with pose 3D landmarks:
sample_00001,x1,y1,z1,x2,y2,z2,....
sample_00002,x1,y1,z1,x2,y2,z2,....
"""
# Create output folder for CVSs.
if not os.path.exists(self._csvs_out_folder):
os.makedirs(self._csvs_out_folder)
for pose_class_name in self._pose_class_names:
print('Bootstrapping ', pose_class_name, file=sys.stderr)
# Paths for the pose class.
images_in_folder = os.path.join(self._images_in_folder, pose_class_name)
images_out_folder = os.path.join(self._images_out_folder, pose_class_name)
csv_out_path = os.path.join(self._csvs_out_folder, pose_class_name + '.csv')
if not os.path.exists(images_out_folder):
os.makedirs(images_out_folder)
with open(csv_out_path, 'w', newline='') as csv_out_file:
csv_out_writer = csv.writer(csv_out_file, delimiter=',', quoting=csv.QUOTE_MINIMAL)
# Get list of images.
image_names = sorted([n for n in os.listdir(images_in_folder) if not n.startswith('.')])
if per_pose_class_limit is not None:
image_names = image_names[:per_pose_class_limit]
# Bootstrap every image.
for image_name in tqdm.tqdm(image_names):
# Load image.
input_frame = cv2.imread(os.path.join(images_in_folder, image_name))
input_frame = cv2.cvtColor(input_frame, cv2.COLOR_BGR2RGB)
# Initialize fresh pose tracker and run it.
with mp_pose.Pose() as pose_tracker:
result = pose_tracker.process(image=input_frame)
pose_landmarks = result.pose_landmarks
# Save image with pose prediction (if pose was detected).
output_frame = input_frame.copy()
if pose_landmarks is not None:
mp_drawing.draw_landmarks(
image=output_frame,
landmark_list=pose_landmarks,
connections=mp_pose.POSE_CONNECTIONS)
output_frame = cv2.cvtColor(output_frame, cv2.COLOR_RGB2BGR)
cv2.imwrite(os.path.join(images_out_folder, image_name), output_frame)
# Save landmarks if pose was detected.
if pose_landmarks is not None:
# Get landmarks.
frame_height, frame_width = output_frame.shape[0], output_frame.shape[1]
pose_landmarks = np.array(
[[lmk.x * frame_width, lmk.y * frame_height, lmk.z * frame_width]
for lmk in pose_landmarks.landmark],
dtype=np.float32)
assert pose_landmarks.shape == (33, 3), 'Unexpected landmarks shape: {}'.format(pose_landmarks.shape)
csv_out_writer.writerow([image_name] + pose_landmarks.flatten().astype(np.str).tolist())
# Draw XZ projection and concatenate with the image.
projection_xz = self._draw_xz_projection(
output_frame=output_frame, pose_landmarks=pose_landmarks)
output_frame = np.concatenate((output_frame, projection_xz), axis=1)
def _draw_xz_projection(self, output_frame, pose_landmarks, r=0.5, color='red'):
frame_height, frame_width = output_frame.shape[0], output_frame.shape[1]
img = Image.new('RGB', (frame_width, frame_height), color='white')
if pose_landmarks is None:
return np.asarray(img)
# Scale radius according to the image width.
r *= frame_width * 0.01
draw = ImageDraw.Draw(img)
for idx_1, idx_2 in mp_pose.POSE_CONNECTIONS:
# Flip Z and move hips center to the center of the image.
x1, y1, z1 = pose_landmarks[idx_1] * [1, 1, -1] + [0, 0, frame_height * 0.5]
x2, y2, z2 = pose_landmarks[idx_2] * [1, 1, -1] + [0, 0, frame_height * 0.5]
draw.ellipse([x1 - r, z1 - r, x1 + r, z1 + r], fill=color)
draw.ellipse([x2 - r, z2 - r, x2 + r, z2 + r], fill=color)
draw.line([x1, z1, x2, z2], width=int(r), fill=color)
return np.asarray(img)
def align_images_and_csvs(self, print_removed_items=False):
"""Makes sure that image folders and CSVs have the same sample.
Leaves only intersetion of samples in both image folders and CSVs.
"""
for pose_class_name in self._pose_class_names:
# Paths for the pose class.
images_out_folder = os.path.join(self._images_out_folder, pose_class_name)
csv_out_path = os.path.join(self._csvs_out_folder, pose_class_name + '.csv')
# Read CSV into memory.
rows = []
with open(csv_out_path, newline='') as csv_out_file:
csv_out_reader = csv.reader(csv_out_file, delimiter=',')
for row in csv_out_reader:
rows.append(row)
# Image names left in CSV.
image_names_in_csv = []
# Re-write the CSV removing lines without corresponding images.
with open(csv_out_path, 'w', newline='') as csv_out_file:
csv_out_writer = csv.writer(csv_out_file, delimiter=',', quoting=csv.QUOTE_MINIMAL)
for row in rows:
image_name = row[0]
image_path = os.path.join(images_out_folder, image_name)
if os.path.exists(image_path):
image_names_in_csv.append(image_name)
csv_out_writer.writerow(row)
elif print_removed_items:
print('Removed image from CSV: ', image_path)
# Remove images without corresponding line in CSV.
for image_name in os.listdir(images_out_folder):
if image_name not in image_names_in_csv:
image_path = os.path.join(images_out_folder, image_name)
os.remove(image_path)
if print_removed_items:
print('Removed image from folder: ', image_path)
def analyze_outliers(self, outliers):
"""Classifies each sample agains all other to find outliers.
If sample is classified differrrently than the original class - it sould
either be deleted or more similar samples should be aadded.
"""
for outlier in outliers:
image_path = os.path.join(self._images_out_folder, outlier.sample.class_name, outlier.sample.name)
print('Outlier')
print(' sample path = ', image_path)
print(' sample class = ', outlier.sample.class_name)
print(' detected class = ', outlier.detected_class)
print(' all classes = ', outlier.all_classes)
img = cv2.imread(image_path)
img = cv2.cvtColor(img, cv2.COLOR_BGR2RGB)
show_image(img, figsize=(20, 20))
def remove_outliers(self, outliers):
"""Removes outliers from the image folders."""
for outlier in outliers:
image_path = os.path.join(self._images_out_folder, outlier.sample.class_name, outlier.sample.name)
os.remove(image_path)
def print_images_in_statistics(self):
"""Prints statistics from the input image folder."""
self._print_images_statistics(self._images_in_folder, self._pose_class_names)
def print_images_out_statistics(self):
"""Prints statistics from the output image folder."""
self._print_images_statistics(self._images_out_folder, self._pose_class_names)
def _print_images_statistics(self, images_folder, pose_class_names):
print('Number of images per pose class:')
for pose_class_name in pose_class_names:
n_images = len([
n for n in os.listdir(os.path.join(images_folder, pose_class_name))
if not n.startswith('.')])
print(' {}: {}'.format(pose_class_name, n_images))
载入数据集,图像应重复所需姿势类的终端状态。
一、 如果你想对俯卧撑进行分类,请提供两个类别的尺寸:当人向上时和当人向下时。
二、每个类应该有大约几十或几百个样本,涵盖不同的摄像机角度、环境条件、身体形状和运动变化,以构建一个好的分类器。
数据集格式如图所示
二、可能出现的问题
一、字体问题

在可视化模块中字体是从’https://github.com/googlefonts/roboto/blob/main/src/hinted/Roboto-Regular.ttf?raw=true’下载,但国内访问一般会超时,可调用本地字体代替。
二、upper_body_only=False
upper_body_only: 默认为 False,是否只检测上半身的地标。人体姿势共有33个地标,上半身的姿势地标有25个。在谷歌提供的文档中是mp_pose.Pose(upper_body_only=False),运行时可能会出问题,将括号中的upper_body_only=False删去即可,变成mp_pose.Pose(),文中代码已经修改。
三、plt.legend(loc=‘upper right’)

在可视化模块中的plt.legend(loc=‘upper right’)会报错,将其注释掉即可,文中代码已经注释。
四、class_name问题
在指定视频路径时,class_name必须和数据集中对应的名字一致,比如class_name=‘pushups_down’
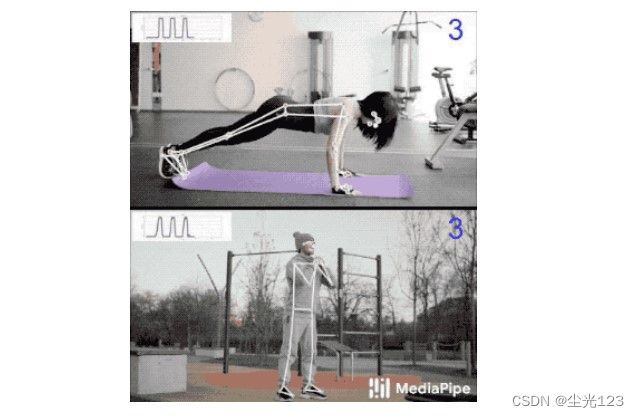
四、最终效果
最终效果如下图所示,该项目可以实现对俯卧撑,深蹲以及引体向上的检测
五、总结
之前的mediapipe博客讲解了mediapipe的多种人体检测,这次博客实现了引体向上/深蹲计数检测,完整官方代码在https://mediapipe.page.link/pose_classification_extended,能看的最好去看看。