计算机视觉——全景图像拼接(作业四)
文章目录
- 1. 基本原理
-
- 1.1 图像拼接的几何原理
- 1.2 2D图像变换原理
- 1.3 直线拟合
- 1.4 RANSAC算法
- 1.5 APAP算法
- 1.6 寻找最佳拼接缝(*Seam Finding*)
- 2. 图像拼接具体实现
-
- 2.1 运行代码
- 2.2 运行结果
- 2.3 结果分析
1. 基本原理
本章学习内容为全景图像拼接,需要我们创建全景图、拼接图像。即将两幅或多幅具有重叠区域的图像,通过特征匹配将具有相同的特征点的图像拼接在一起,将来自多个不同视角拍摄的图像变换到同一视角下,拼接成一张宽视野图像。
这里的特征点指代SIFT特征点,SIFT是具有很强稳健性的描述子,比起其他描述子,产生更少的错误匹配。
以下是图像拼接的基础流程:
- 针对某个场景拍摄多张/序列图像;
- 计算第二张图像与第一张图像之间的变换关系:
a. 提取特征点,生成描述符;
b. 特征匹配;- 将第二张图像叠加到第一张图像的坐标系中;
a. 图像映射;
b. 图像扭曲;- 变换后的融合/合成
- 在多图场景中,重复上述过程
1.1 图像拼接的几何原理
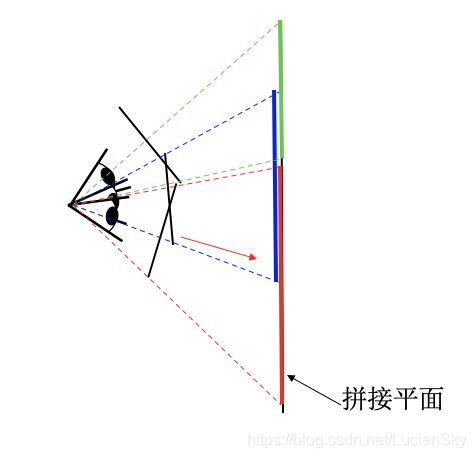
全景融合的 3D 几何解释:
- 图像被投影到共同的拼接平面上(同一坐标系);
- 在拼接平面上实现全景融合;
- 在拼接的应用中,其实可以简化理解为 2D图像的变换,叠加过程;
 |
 |
|---|
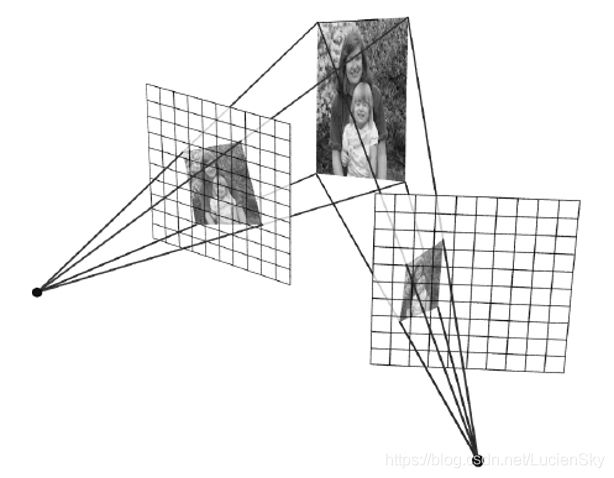
1.2 2D图像变换原理
给定变换模型 x ′ = h ( x ) x'= h(x) x′=h(x) ,以及输入图像 f ( x ) f(x) f(x), 根据 f ( x ) f(x) f(x)计算变换后的图像 g ( x ’ ) = f ( h ( x ) ) g(x’) = f(h(x)) g(x’)=f(h(x))有两种方法,分别为前向映射和逆向映射。
前向映射
对于 f ( x ) f ( x ) f(x) 中的每个像素 x x x,根据变换模型计算相应的映射坐标 x ′ = h ( x ) x' = h( x ) x′=h(x) ,并将 x x x的像素值赋给 g ( x ′ ) g ( x') g(x′)。
当像素落在两个像素之间时:近邻插值


逆向映射
对于 g ( x ′ ) g ( x') g(x′)中的每个像素 x ′ x' x′,根据变换模型计算相应的映射坐标 x = h − 1 ( x ′ ) x = h^{−1} ( x') x=h−1(x′),并将x的像素值赋给 g ( x ′ ) g( x') g(x′)。
当像素落在两个像素之间时:线性插值/双线性插值:


介绍一下主要的插值方法:
- 最近邻插值;
- 线性插值;
- 双线性插值;
- 三线性插值;
图像映射流程
- 针对两张/多张图像提取特征;
- 特征匹配;
- 根据图像变换特点,选取合适的变换结构;
- 根据DLT等方法计算变换结构;
- 采用正向/逆向映射,利用插值方式实现图像映射变换;
1.3 直线拟合
给定若干二维空间中的点,求直线 y = a x + b y = ax + b y=ax+b,使得该直线对空间点的拟合误差最小。
直线确定步骤:
- 随机选择两个点;
- 根据该点构造直线;
- 给定阈值,计算 inliers 数量;
 |
 |
|---|---|
 |
 |
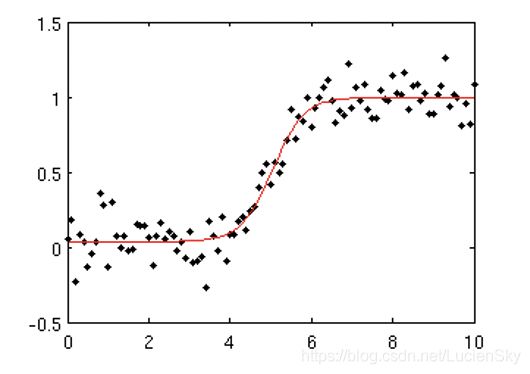
在空间中随机寻找两个点,并以这两点构造出一条直线,然后计算在这条线上的对应inliers的数量,当inliers值达到所需的阈值,可以得到一条拟合直线。
对于圆,通样可以用该方法,两点确定一条直线,三点可以确定一个圆,随机确定三个点,便可确定一个圆的方程,然后计算在该圆上的inliers值,之后的过程与直线的一致。

对于复杂的曲线方程,需要先给定一个方程式(例如 y = a x + b x 2 + c x 3 . . . + n y = ax + bx^2 + cx^3 . . . + n y=ax+bx2+cx3...+n,这个方程式的参数是我们要求的,求出一个解,使得在inliers值尽可能多,或者是求出的曲线与点之间是最逼近。
1.4 RANSAC算法
RANSAC是“RANdom SAmple Consensus”(随机一致性采样)的缩写。该方法是用来找到正确模型来拟合带有噪声数据的迭代方法。给定一个模型,例如点集之间的单应性矩阵,RANSAC基本的思想是,数据中包含正确的点和噪声点,合理的模型应该能够在描述正确数据点的同时摒弃噪声点。 即从一组数据集(包含噪声点的数据集)中,能够从中挑选出正确的点,获取能够正确拟合的参数模型。
稳健的单映性矩阵估计
在使用RANSAC模块时,我们只需要在相应的Python类中实现fit()和get_error方法,剩下就是正确地使用ransac.py。
ransac.py文件可以在GitHub上下载:ransac.py。
RANSAC loop:
- 随机选择四对匹配特征;
- 根据直接线性变换解法DLT计算单应矩阵 H H H(唯一解);
- 对所有匹配点,计算映射误差 ε = ∣ ∣ p i ′ , H p i ∣ ∣ ε = ∣ ∣ p_i ' , H_{p_i}∣ ∣ ε=∣∣pi′,Hpi∣∣;
- 根据误差阈值,确定inliers(例如3-5像素);
- 针对最大inliers集合,重新计算单应矩阵 H H H;
我们使用RANSAC算法来求解单应性矩阵,首先需要将下面模型类添加到homography.py文件中:
下面展示一些 内联代码片。
class RansacModel(object):
""" 用于测试单应性矩阵的类,其中单应性矩阵是由网站http://www.scipy.org/Cookbook/RANSAC 上的ransac.py 计算出来的"""
def __init__(self, debug=False):
self.debug = debug
def fit(self, data):
""" 计算选取的4 个对应的单应性矩阵 """
# 将其转置,来调用H_from_points() 计算单应性矩阵
data = data.T
# 映射的起始点
fp = data[:3, :4]
# 映射的目标点
tp = data[3:, :4]
# 计算单应性矩阵,然后返回
return H_from_points(fp, tp)
def get_error(self, data, H):
""" 对所有的对应计算单应性矩阵,然后对每个变换后的点,返回相应的误差"""
data = data.T
# 映射的起始点
fp = data[:3]
# 映射的目标点
tp = data[3:]
# 变换fp
fp_transformed = dot(H, fp)
# 归一化齐次坐标
# for i in range(3):
# fp_transformed[i] /= fp_transformed[2]
fp_transformed = normalize(fp_transformed)
# 返回每个点的误差
return sqrt(sum((tp - fp_transformed) ** 2, axis=0))
可以看到,这个类包含fit()方法。该方法仅仅接受由ransac.py选择的4个对应点对(data 中的前4个点对),然后拟合一个单应性矩阵。记住,4个点对是计算单应性矩阵所需的最少数目。由于get_error()方法对每个对应点对使用该单应性矩阵,然后返回相应的平方距离之和,因此RANSAC算法能够判定哪些点对是正确的,哪些是错误的。在实际中,我们需要在距离上使用一个阈值来决定哪些单应性矩阵是合理的。为了方便使用,将下面的函数添加到homography.py文件中:
def H_from_ransac(fp, tp, model, maxiter=1000, match_theshold=10):
""" 使用RANSAC 稳健性估计点对应间的单应性矩阵H(ransac.py 为从 http://www.scipy.org/Cookbook/RANSAC 下载的版本)
# 输入:齐次坐标表示的点fp,tp(3×n 的数组)"""
from PCV.tools import ransac
# 对应点组
data = vstack((fp, tp))
# 计算H,并返回
H, ransac_data = ransac.ransac(data.T, model, 4, maxiter, match_theshold, 10, return_all=True)
return H, ransac_data['inliers']
该函数同样允许提供阈值和最小期望的点对数目。最重要的参数是最大迭代次数:程序退出太早可能得到一个坏解;迭代次数太多会占用太多时间。函数的返回结果为单应性矩阵和对应该单应性矩阵的正确点对。
1.5 APAP算法
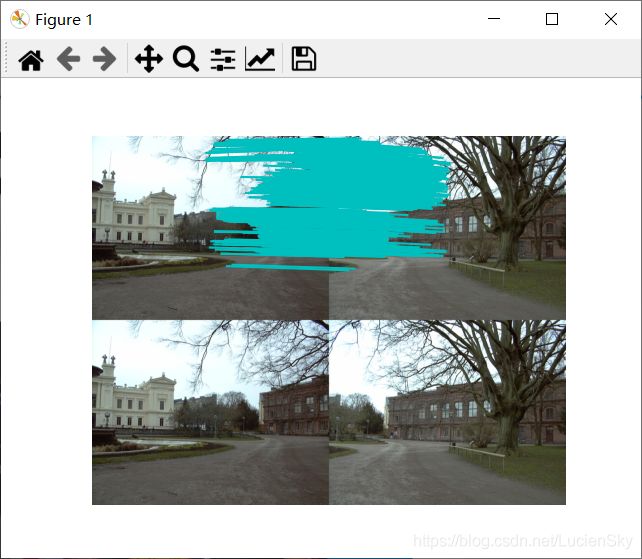
在图像拼接融合的过程中,拼接融合后的图像可能会存在“鬼影现象”,即图像叠加后出现重影的现象。如下图所示:
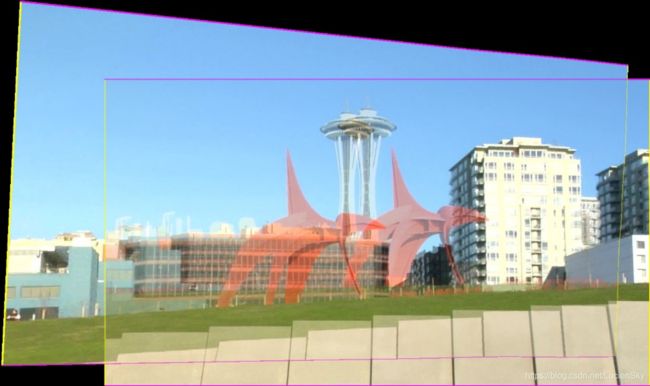
为了解决“鬼影”问题,2013年,Julio Zaragoza等人发表了一种新的图像配准算法APAP(As-Projective-As-Possible Image Stitching with Moving DLT)。在拼接时,将图像分成很多个规则的小网格,分别计算局部的单应性变换矩阵,使整体的单应性变换误差降低。

可以看出,使用APAP算法后的拼接图像,“鬼影”的现象明显消失了。
APAP算法流程:
- SIFT得到两幅图像的匹配点对;
- 通过RANSAC剔除外点,得到N对内点;
- 利用DLT和SVD计算全局单应性;
- 将源图划分网格,取网格中心点,计算每个中心点和源图上内点之间的欧式距离和权重;
- 将权重放到DLT算法的A矩阵中,构建成新的 W ∗ A W*A W∗A矩阵,重新SVD分解,自然就得到了当前网格的局部单应性矩阵;
- 遍历每个网格,利用局部单应性矩阵映射到全景画布上,就得到了APAP变换后的源图;
- 进行拼接线的加权融合;
Apap虽然能够较好地完成配准,但非常依赖于特征点对。若图像高频信息较少,特征点对过少,配准将完全失效,并且对大尺度的图像进行配准,其效果也不是很好,一切都决定于特征点对的数量。
1.6 寻找最佳拼接缝(Seam Finding)
在两张图像的重叠区域选择一条最佳拼接缝,拼接缝左边的图像为第一张图像的内容,拼接缝右边的图像为第二张图像的内容,并且拼接缝上两幅图像的差异应该尽可能小,这样也可以有效的解决“鬼影”现象,而且拼接的效果也会更好。
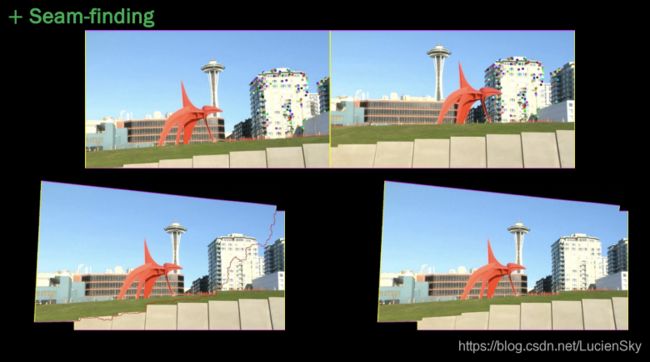
找到最佳的拼接缝需要使用到Seam Finding(寻找最佳拼接缝)算法。算法主要原理运用了最大流最小割的思想。找到两张图像中差异最小的一条线,进行切割拼接,使得拼接缝两边的图像差异最小。
最大流最小割是运筹学思想,感兴趣可查看运筹学相关资料。
2. 图像拼接具体实现
估计出图像间的单应性矩阵(使用RANSAC算法),现在我们需要将所有的图像扭曲到一个公共的图像平面上。通常,这里的公共平面为中心图像平面(否则,需要进行大量变形)。一种方法是创建一个很大的图像,比如图像中全部填充0,使其和中心图像平行,然后将所有的图像扭曲到上面。由于我们所有的图像是由照相机水平旋转拍摄的,因此我们可以使用一个较简单的步骤:将中心图像左边或者右边的区域填充0,以便为扭曲的图像腾出空间。将下面的代码添加到warp.py文件中:
def panorama(H, fromim, toim, padding=2400, delta=2400):
""" 使用单应性矩阵H(使用RANSAC 健壮性估计得出),协调两幅图像,创建水平全景图像。结果
为一幅和toim 具有相同高度的图像。padding 指定填充像素的数目,delta 指定额外的平移量"""
# 检查图像是灰度图像,还是彩色图像
is_color = len(fromim.shape) == 3
# 用于geometric_transform() 的单应性变换
def transf(p):
p2 = dot(H, [p[0], p[1], 1])
return (p2[0] / p2[2], p2[1] / p2[2])
if H[1, 2] < 0: # fromim 在右边
print('warp - right')
# 变换fromim
if is_color:
# 在目标图像的右边填充0
toim_t = hstack((toim, zeros((toim.shape[0], padding, 3))))
fromim_t = zeros((toim.shape[0], toim.shape[1] + padding, toim.shape[2]))
for col in range(3):
fromim_t[:, :, col] = ndimage.geometric_transform(fromim[:, :, col],
transf, (toim.shape[0], toim.shape[1] + padding))
else:
# 在目标图像的右边填充0
toim_t = hstack((toim, zeros((toim.shape[0], padding))))
fromim_t = ndimage.geometric_transform(fromim, transf,
(toim.shape[0], toim.shape[1] + padding))
else:
print('warp - left')
# 为了补偿填充效果,在左边加入平移量
H_delta = array([[1, 0, 0], [0, 1, -delta], [0, 0, 1]])
H = dot(H, H_delta)
# fromim 变换
if is_color:
# 在目标图像的左边填充0
toim_t = hstack((zeros((toim.shape[0], padding, 3)), toim))
fromim_t = zeros((toim.shape[0], toim.shape[1] + padding, toim.shape[2]))
for col in range(3):
fromim_t[:, :, col] = ndimage.geometric_transform(fromim[:, :, col],
transf, (toim.shape[0], toim.shape[1] + padding))
else:
# 在目标图像的左边填充0
toim_t = hstack((zeros((toim.shape[0], padding)), toim))
fromim_t = ndimage.geometric_transform(fromim,
transf, (toim.shape[0], toim.shape[1] + padding))
# 协调后返回(将fromim 放置在toim 上)
if is_color:
# 所有非黑色像素
alpha = ((fromim_t[:, :, 0] * fromim_t[:, :, 1] * fromim_t[:, :, 2]) > 0)
for col in range(3):
toim_t[:, :, col] = fromim_t[:, :, col] * alpha + toim_t[:, :, col] * (1 - alpha)
else:
alpha = (fromim_t > 0)
toim_t = fromim_t * alpha + toim_t * (1 - alpha)
return toim_t
对于通用的geometric_transform()函数,我们需要指定能够描述像素到像素间映射的函数。在这个例子中,transf()函数就是该指定的函数。该函数通过将像素和 H H H相乘,然后对齐次坐标进行归一化来实现像素间的映射。通过查看 H H H中的平移量, 我们可以决定应该将该图像填补到左边还是右边。当该图像填补到左边时,由于目标图像中点的坐标也变化了,所以在“左边”情况中,需要在单应性矩阵中加入平移。
2.1 运行代码
from pylab import *
from numpy import *
from PIL import Image
# If you have PCV installed, these imports should work
from PCV.geometry import homography, warp
from PCV.localdescriptors import sift
np.seterr(invalid='ignore')
"""
This is the panorama example from section 3.3.
"""
# 设置数据文件夹的路径
featname = ['image/Univ' + str(i + 1) + '.sift' for i in range(5)]
imname = ['image/Univ' + str(i + 1) + '.jpg' for i in range(5)]
# 提取特征并匹配使用sift算法
l = {}
d = {}
for i in range(5):
sift.process_image(imname[i], featname[i])
l[i], d[i] = sift.read_features_from_file(featname[i])
matches = {}
for i in range(4):
matches[i] = sift.match(d[i + 1], d[i])
# 可视化匹配
for i in range(4):
im1 = array(Image.open(imname[i]))
im2 = array(Image.open(imname[i + 1]))
figure()
sift.plot_matches(im2, im1, l[i + 1], l[i], matches[i], show_below=True)
# 将匹配转换成齐次坐标点的函数
def convert_points(j):
ndx = matches[j].nonzero()[0]
fp = homography.make_homog(l[j + 1][ndx, :2].T)
ndx2 = [int(matches[j][i]) for i in ndx]
tp = homography.make_homog(l[j][ndx2, :2].T)
# switch x and y - TODO this should move elsewhere
fp = vstack([fp[1], fp[0], fp[2]])
tp = vstack([tp[1], tp[0], tp[2]])
return fp, tp
# 估计单应性矩阵
model = homography.RansacModel()
fp, tp = convert_points(1)
H_12 = homography.H_from_ransac(fp, tp, model)[0] # im1 到im2 的单应性矩阵
fp, tp = convert_points(0)
H_01 = homography.H_from_ransac(fp, tp, model)[0] # im0 到im1 的单应性矩阵
tp, fp = convert_points(2) # 注意:点是反序的
H_32 = homography.H_from_ransac(fp, tp, model)[0] # im3 到im2 的单应性矩阵
tp, fp = convert_points(3) # 注意:点是反序的
H_43 = homography.H_from_ransac(fp, tp, model)[0] # im4 到im3 的单应性矩阵
# 扭曲图像
delta = 2000 # 用于填充和平移
im1 = array(Image.open(imname[1]), "uint8")
im2 = array(Image.open(imname[2]), "uint8")
im_12 = warp.panorama(H_12, im1, im2, delta, delta)
im1 = array(Image.open(imname[0]), "f")
im_02 = warp.panorama(dot(H_12, H_01), im1, im_12, delta, delta)
im1 = array(Image.open(imname[3]), "f")
im_32 = warp.panorama(H_32, im1, im_02, delta, delta)
im1 = array(Image.open(imname[4]), "f")
im_42 = warp.panorama(dot(H_32, H_43), im1, im_32, delta, 2 * delta)
figure()
imshow(array(im_42, "uint8"))
axis('off')
show()
2.2 运行结果
图片集:

运行结果:
 |
 |
|---|---|
 |
 |
| – | – |

2.3 结果分析
从运行结果来看,拼接图像基本对齐,但中间图片存在拼接缝,这是因为图片的曝光程度不同导致的,因为曝光参数的不同,导致拼接后的全景图可以明显的看出明暗差异。也可能是因为图像景深的复杂程度导致的,使得算法在匹配时得到的特征点对不是很多,导致匹配拼接的结果差。但综合来说效果还是比较好的。
总体来说,用 Apap算法对景深落差小的图像进行拼接,能够有比较好的拼接效果;但Apap算法十分依赖特征点对,当图像高频信息较少,特征点对过少时,配准将完全失效,并且对大尺度的图像进行配准,其效果也不是很好。所以特征点对的数量是决定 Apap算法效果的一个重要因素。