基于改进U-Net的铁道轨道分割系统(源码&教程)
1.研究背景
在铁路无人驾驶领域中,城市轨道交通中的地铁列车运行环境相对的封闭[1,2]。使得较容易开展无人驾驶,从上世纪80年代开始无人驾驶系统应用于法国、日本、马来西亚、加拿大,新加坡等国家﹐国内城市轨道交通中北京、上海、重庆、深圳均有地铁线路应用了无人驾驶系统[3]。相比于汽车与轨道交通的自动驾驶,地上铁路的无人驾驶有其独特性,铁路的运行环境相对汽车具有封闭性,但是相对于轨道交通的运行环境又是开放的,铁路机车是依据列控系统的信号进行运行的,随着铁路机车自动化水平的提高,现有运行系统配合环境感知系统即可实现无人驾驶。
2.图片效果展示
3.视频效果演示
基于改进U-Net的铁道轨道分割系统(源码&教程)_哔哩哔哩_bilibili
4.铁路分割数据集
5.改进U-Net网络
U-net与ResNet结合
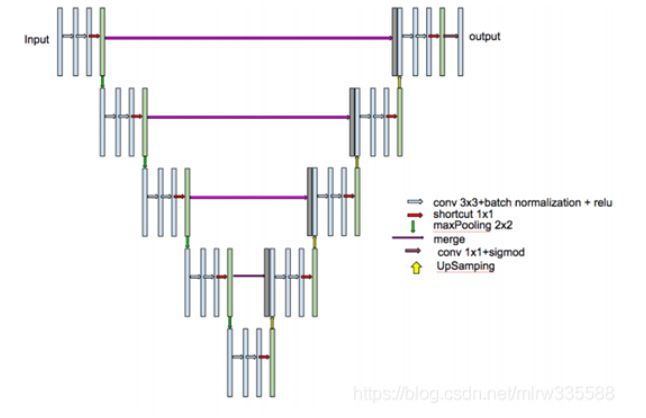
改进后的U-NET分为收缩网络以及扩张网络两部分。
收缩网络与U-NET中的收缩网络类似,有所不同的是,对于每一层输出的结果先进行规范化处理,随后通过激活函数进行激活。每一个下采样包含两个3x3的卷积层,一个1x1的“捷径”以及一个2x2的池化层。
扩张网络与 U-NET 中的扩张网络类似,每一次上采样包含两个 3x3的卷积层,一个 1x1 的“捷径”,在每一次上采样之前,需要合并收缩网络与之相对应的结果。与收缩网络相似,扩张网络中每一层输出结果都需要先进性规范化处理,随后通过激活函数进行激活。最后,加入 1x1 的卷积网络确定 该特征图所对应的结果。
改进后的 U-NET 网络结构如下图所示
Res-UNet和Dense-UNet分别受到残差连接和密集连接的启发,将UNet的每一个子模块分别替换为具有残差连接和密集连接的形式。将Res-UNet用于视网膜图像的分割,其结构如下图所示,其中灰色实线表示各个模块中添加的残差连接。

该网络除了MultiRes模块以外,还提出了一个残差路径(ResPath), 使编码器的特征在与解码器中的对应特征拼接之前,先进行了一些额外的卷积操作,如下图所示。作者认为编码器中的特征由于卷积层数较浅,是低层次的特征,而解码器中对应的特征由于卷积层更深,是较高层次的特征,二者在语义上有较大差距,推测不宜直接将二者进行拼接。因此,使用额外的ResPath使二者在拼接前具有一致的深度,在ResPath1, 2, 3, 4中分别使用4,3,2,1个卷积层。
代码实现
from keras.layers import Input, Conv2D, MaxPooling2D, Conv2DTranspose, concatenate, BatchNormalization, Activation, add
from keras.models import Model, model_from_json
from keras.optimizers import Adam
from keras.layers.advanced_activations import ELU, LeakyReLU
from keras.utils.vis_utils import plot_model
def conv2d_bn(x, filters, num_row, num_col, padding='same', strides=(1, 1), activation='relu', name=None):
'''
2D Convolutional layers
Arguments:
x {keras layer} -- input layer
filters {int} -- number of filters
num_row {int} -- number of rows in filters
num_col {int} -- number of columns in filters
Keyword Arguments:
padding {str} -- mode of padding (default: {'same'})
strides {tuple} -- stride of convolution operation (default: {(1, 1)})
activation {str} -- activation function (default: {'relu'})
name {str} -- name of the layer (default: {None})
Returns:
[keras layer] -- [output layer]
'''
x = Conv2D(filters, (num_row, num_col), strides=strides, padding=padding, use_bias=False)(x)
x = BatchNormalization(axis=3, scale=False)(x)
if(activation == None):
return x
x = Activation(activation, name=name)(x)
return x
def trans_conv2d_bn(x, filters, num_row, num_col, padding='same', strides=(2, 2), name=None):
'''
2D Transposed Convolutional layers
Arguments:
x {keras layer} -- input layer
filters {int} -- number of filters
num_row {int} -- number of rows in filters
num_col {int} -- number of columns in filters
Keyword Arguments:
padding {str} -- mode of padding (default: {'same'})
strides {tuple} -- stride of convolution operation (default: {(2, 2)})
name {str} -- name of the layer (default: {None})
Returns:
[keras layer] -- [output layer]
'''
x = Conv2DTranspose(filters, (num_row, num_col), strides=strides, padding=padding)(x)
x = BatchNormalization(axis=3, scale=False)(x)
return x
def MultiResBlock(U, inp, alpha = 1.67):
'''
MultiRes Block
Arguments:
U {int} -- Number of filters in a corrsponding UNet stage
inp {keras layer} -- input layer
Returns:
[keras layer] -- [output layer]
'''
W = alpha * U
shortcut = inp
shortcut = conv2d_bn(shortcut, int(W*0.167) + int(W*0.333) +
int(W*0.5), 1, 1, activation=None, padding='same')
conv3x3 = conv2d_bn(inp, int(W*0.167), 3, 3,
activation='relu', padding='same')
conv5x5 = conv2d_bn(conv3x3, int(W*0.333), 3, 3,
activation='relu', padding='same')
conv7x7 = conv2d_bn(conv5x5, int(W*0.5), 3, 3,
activation='relu', padding='same')
out = concatenate([conv3x3, conv5x5, conv7x7], axis=3)
out = BatchNormalization(axis=3)(out)
out = add([shortcut, out])
out = Activation('relu')(out)
out = BatchNormalization(axis=3)(out)
return out
def ResPath(filters, length, inp):
'''
ResPath
Arguments:
filters {int} -- [description]
length {int} -- length of ResPath
inp {keras layer} -- input layer
Returns:
[keras layer] -- [output layer]
'''
shortcut = inp
shortcut = conv2d_bn(shortcut, filters, 1, 1,
activation=None, padding='same')
out = conv2d_bn(inp, filters, 3, 3, activation='relu', padding='same')
out = add([shortcut, out])
out = Activation('relu')(out)
out = BatchNormalization(axis=3)(out)
for i in range(length-1):
shortcut = out
shortcut = conv2d_bn(shortcut, filters, 1, 1,
activation=None, padding='same')
out = conv2d_bn(out, filters, 3, 3, activation='relu', padding='same')
out = add([shortcut, out])
out = Activation('relu')(out)
out = BatchNormalization(axis=3)(out)
return out
def MultiResUnet(height, width, n_channels):
'''
MultiResUNet
Arguments:
height {int} -- height of image
width {int} -- width of image
n_channels {int} -- number of channels in image
Returns:
[keras model] -- MultiResUNet model
'''
inputs = Input((height, width, n_channels))
mresblock1 = MultiResBlock(32, inputs)
pool1 = MaxPooling2D(pool_size=(2, 2))(mresblock1)
mresblock1 = ResPath(32, 4, mresblock1)
mresblock2 = MultiResBlock(32*2, pool1)
pool2 = MaxPooling2D(pool_size=(2, 2))(mresblock2)
mresblock2 = ResPath(32*2, 3, mresblock2)
mresblock3 = MultiResBlock(32*4, pool2)
pool3 = MaxPooling2D(pool_size=(2, 2))(mresblock3)
mresblock3 = ResPath(32*4, 2, mresblock3)
mresblock4 = MultiResBlock(32*8, pool3)
pool4 = MaxPooling2D(pool_size=(2, 2))(mresblock4)
mresblock4 = ResPath(32*8, 1, mresblock4)
mresblock5 = MultiResBlock(32*16, pool4)
up6 = concatenate([Conv2DTranspose(
32*8, (2, 2), strides=(2, 2), padding='same')(mresblock5), mresblock4], axis=3)
mresblock6 = MultiResBlock(32*8, up6)
up7 = concatenate([Conv2DTranspose(
32*4, (2, 2), strides=(2, 2), padding='same')(mresblock6), mresblock3], axis=3)
mresblock7 = MultiResBlock(32*4, up7)
up8 = concatenate([Conv2DTranspose(
32*2, (2, 2), strides=(2, 2), padding='same')(mresblock7), mresblock2], axis=3)
mresblock8 = MultiResBlock(32*2, up8)
up9 = concatenate([Conv2DTranspose(32, (2, 2), strides=(
2, 2), padding='same')(mresblock8), mresblock1], axis=3)
mresblock9 = MultiResBlock(32, up9)
conv10 = conv2d_bn(mresblock9, 1, 1, 1, activation='sigmoid')
model = Model(inputs=[inputs], outputs=[conv10])
return model
6.环境配置
tensorflow-gpu2.3.0
numpy1.21.5
matplotlib==3.5.1
7. 创建数据集路径索引文件
项目根目录下的"./prepare_dataset"目录下有三个文件:drive.py,stare.py和chasedb1.py。分别将三个文件中的“data_root_path”参数赋值为上述3.2准备好的数据集的绝对路径(例如: data_root_path=“/home/lee/datasets”)。然后分别运行:
python ./prepare_dataset/drive.py
python ./prepare_dataset/stare.py
python ./prepare_dataset/chasedb1.py
即可在"./prepare_dataset/data_path_list"目录下对应的数据集文件夹中生成"train.txt"和"test.txt"文件,分别存储了用于训练和测试的数据路径(每行依次存储原图,标签和FOV路径(用空格隔开))。
8.训练模型
在根目录下的"config.py"文件中修改超参数以及其他配置信息。特别要注意 “train_data_path_list"和"test_data_path_list"这两个参数,分别指向3.3中创建的某一个数据集的"train.txt"和"text.txt"。 在"train.py"中构造创建好的模型(所有模型都在"./models"内手撕),例如指定UNet模型:
net = models.UNetFamily.U_Net(1,2).to(device) # line 103 in train.py
修改完成后,在项目根目录执行:
CUDA_VISIBLE_DEVICES=1 python train.py --save UNet_vessel_seg --batch_size 64
上述命令将在1号GPU上执行训练程序,训练结果保存在“ ./experiments/UNet_vessel_seg”文件夹中,batchsize取64,其余参数取config.py中的默认参数。
可以在config中配置培训信息,也可以用命令行修改配置参数。训练结果将保存到“ ./experiments”文件夹中的相应目录(保存目录的名称用参数"–save"指定)。
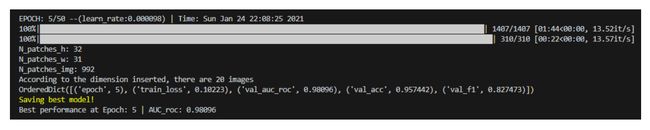
此外,需要注意一点,config文件中有个“val_on_test”参数。当其为真时表示会在训练的每个epoch结束后在测试集上进行性能评估,并选取"AUC of ROC"最高的模型保存为“best_model.pth”;当其为假时,会用验证集性能评估结果(AUC of ROC)保存模型。当然保存最佳模型依据的指标可以自行修改,默认为AUC of ROC。
9.测试评估
在“test.py”文件中构造对应的模型(同上),例如指定UNet模型:
net = models.UNetFamily.U_Net(1,2).to(device)
测试过程也需要"./config.py"中的相关参数,也可以在运行时通过命令行参数修改。
然后运行:
CUDA_VISIBLE_DEVICES=1 python test.py --save UNet_vessel_seg
上述命令将训练好的“./experiments /UNet_vessel_seg/best_model.pth”参数加载到相应的模型,并在测试集上进行性能测试,其测试性能指标结果保存在同一文件夹中的"performance.txt"中,同时会绘制相应的可视化结果。
10.系统整合:
下图源码&环境部署视频教程&轨道分割数据集

参考博客《基于改进U-Net的铁道轨道分割系统(源码&教程)》
11.参考文献
[1]卢宏涛,张秦川.深度卷积神经网络在计算机视觉中的应用研究综述[D].2016
[2]王洪升,曾连荪,田蔚风.人工智能在车辆自动驾驶中的应用[D].2004
[3]路向阳,李雷,雷成健,等.城市轨道交通全自动驾驶技术发展综述[D].2018
[4]He, Kaiming,Gkioxari, Georgia,Dollar, Piotr,等.Mask R-CNN[J].IEEE Transactions on Pattern Analysis and Machine Intelligence.2020,42(2).386-397.DOI:10.1109/TPAMI.2018.2844175.