深度学习之目标检测backone篇——ResNet网络(50,101,152)
-
关于ResNet的实现
-
通用框架的实现
import torch
from torch import Tensor
import torch.nn.functional as F
from torch import nn
class Bottleneck(nn.Module):
expansion = 4
def __init__(self, in_channel, out_channel, stride=1, downsample=None, norm_layer=None):
super(Bottleneck, self).__init__()
if norm_layer is None:
norm_layer = nn.BatchNorm2d
self.conv1 = nn.Conv2d(in_channels=in_channel, out_channels=out_channel,
kernel_size=(1,1), stride=(1,1), bias=False) # squeeze channels
self.bn1 = norm_layer(out_channel)
# -----------------------------------------
self.conv2 = nn.Conv2d(in_channels=out_channel, out_channels=out_channel,
kernel_size=(3,3), stride=(stride,stride), bias=False, padding=(1,1))
self.bn2 = norm_layer(out_channel)
# -----------------------------------------
self.conv3 = nn.Conv2d(in_channels=out_channel, out_channels=out_channel * self.expansion,
kernel_size=(1,1), stride=(1,1), bias=False) # unsqueeze channels
self.bn3 = norm_layer(out_channel * self.expansion)
self.relu = nn.ReLU(inplace=True)
self.downsample = downsample
def forward(self, x):
identity = x
if self.downsample is not None:
identity = self.downsample(x)
out = self.conv1(x)
out = self.bn1(out)
out = self.relu(out)
out = self.conv2(out)
out = self.bn2(out)
out = self.relu(out)
out = self.conv3(out)
out = self.bn3(out)
out += identity
out = self.relu(out)
return out
class ResNet(nn.Module):
def __init__(self, block, blocks_num, num_classes=1000, include_top=True, norm_layer=None):
'''
:param block:块
:param blocks_num:块数
:param num_classes: 分类数
:param include_top:
:param norm_layer: BN
'''
super(ResNet, self).__init__()
if norm_layer is None:
norm_layer = nn.BatchNorm2d
self._norm_layer = norm_layer
self.include_top = include_top
self.in_channel = 64
self.conv1 = nn.Conv2d(in_channels=3, out_channels=self.in_channel, kernel_size=(7,7), stride=(2,2),
padding=(3,3), bias=False)
self.bn1 = norm_layer(self.in_channel)
self.relu = nn.ReLU(inplace=True)
self.maxpool = nn.MaxPool2d(kernel_size=3, stride=2, padding=1)
self.layer1 = self._make_layer(block, 64, blocks_num[0])
self.layer2 = self._make_layer(block, 128, blocks_num[1], stride=2)
self.layer3 = self._make_layer(block, 256, blocks_num[2], stride=2)
self.layer4 = self._make_layer(block, 512, blocks_num[3], stride=2)
if self.include_top:
self.avgpool = nn.AdaptiveAvgPool2d((1, 1)) # output size = (1, 1)
self.fc = nn.Linear(512 * block.expansion, num_classes)
'''
初始化
'''
for m in self.modules():
if isinstance(m, nn.Conv2d):
nn.init.kaiming_normal_(m.weight, mode='fan_out', nonlinearity='relu')
def _make_layer(self, block, channel, block_num, stride=1):
norm_layer = self._norm_layer
downsample = None
if stride != 1 or self.in_channel != channel * block.expansion:
downsample = nn.Sequential(
nn.Conv2d(self.in_channel, channel * block.expansion, kernel_size=(1,1), stride=(stride,stride), bias=False),
norm_layer(channel * block.expansion))
layers = []
layers.append(block(self.in_channel, channel, downsample=downsample,
stride=stride, norm_layer=norm_layer))
self.in_channel = channel * block.expansion
for _ in range(1, block_num):
layers.append(block(self.in_channel, channel, norm_layer=norm_layer))
return nn.Sequential(*layers)
def forward(self, x):
x = self.conv1(x)
x = self.bn1(x)
x = self.relu(x)
x = self.maxpool(x)
x = self.layer1(x)
x = self.layer2(x)
x = self.layer3(x)
x = self.layer4(x)
if self.include_top:
x = self.avgpool(x)
x = torch.flatten(x, 1)
x = self.fc(x)
return x
-
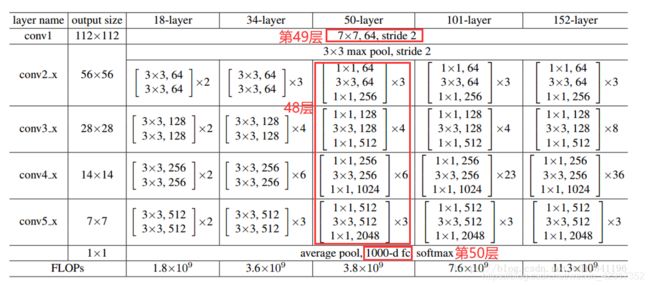
通过传入超参数的不同实现不同的ResNet结构
-
不同的传入参数结构
-
resnet50 [3,4,6,3]
-
resnet101 [3,4,23,3]
-
resnet152 [3,8,36,3]