python opencv实现相机内参标定
1.内容简介
使用python opencv 标定相机内参。
2.实现方案
(1)从网络上下载一张棋盘格图片,粘贴到word文档上,设定尺寸大小为合适值,作为标定板。
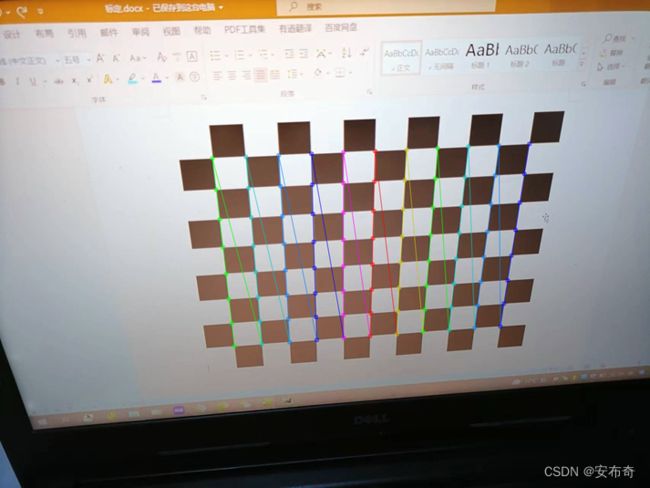
(2)在不同距离,不同角度下用手机相机拍摄棋盘图片。
 |
 |
|---|---|
 |
 |
(3)调用opencv findChessboardCorners和cornerSubPix函数提取棋盘的角点。
(4)调用opencv calibrateCamera函数标定相机内参。
3 代码实现
import glob
import cv2
import numpy as np
from PIL import Image
# 8行11列棋盘角点
CHECKERBOARD = (8, 11)
criteria = (cv2.TERM_CRITERIA_EPS + cv2.TERM_CRITERIA_MAX_ITER, 30, 0.001)
# 世界坐标中的3D角点,z恒为0
objpoints = []
# 像素坐标中的2D点
imgpoints = []
# 利用棋盘定义世界坐标系中的角点
objp = np.zeros((1, CHECKERBOARD[0] * CHECKERBOARD[1], 3), np.float32)
objp[0, :, :2] = np.mgrid[0:CHECKERBOARD[0], 0:CHECKERBOARD[1]].T.reshape(-1, 2)
# 从文件夹中读取所有图片
images = glob.glob('chessboard_images/*.jpg')
gray = None
for i in range(len(images)):
fname = images[i]
img = cv2.imread(fname)
gray = cv2.cvtColor(img, cv2.COLOR_BGR2GRAY)
# 查找棋盘角点
ret, corners = cv2.findChessboardCorners(gray, CHECKERBOARD, cv2.CALIB_CB_ADAPTIVE_THRESH +
cv2.CALIB_CB_FAST_CHECK + cv2.CALIB_CB_NORMALIZE_IMAGE)
"""
使用cornerSubPix优化探测到的角点
"""
if ret == True:
objpoints.append(objp)
corners2 = cv2.cornerSubPix(gray, corners, (11, 11), (-1, -1), criteria)
imgpoints.append(corners2)
# 显示角点
img = cv2.drawChessboardCorners(img, CHECKERBOARD, corners2, ret)
new_img = Image.fromarray(img.astype(np.uint8))
new_img.save('chessboard_{}.png'.format(i))
# plt.imshow(img)
# plt.show()
# cv2.imshow('img', img)
# cv2.waitKey(0)
# cv2.destroyAllWindows()
# 标定
ret, mtx, dist, rvecs, tvecs = cv2.calibrateCamera(objpoints, imgpoints, gray.shape[::-1], None, None)
print("重投影误差:\n")
print(ret)
print("内参 : \n")
print(mtx)
print("畸变 : \n")
print(dist)
print("旋转向量 : \n")
print(rvecs)
print("平移向量 : \n")
print(tvecs)
4 标定结果
试验相机标定后得到的相机内参矩阵为

镜头畸变值为:
![]()