牛顿法和高斯牛顿法对比
文章目录
- 一、非线性最小二乘
- 一、牛顿法
- 二、高斯牛顿法
- 三、列文伯格-马夸尔特法(LM)
- 四、ceres求解优化问题
一、非线性最小二乘
考虑最小二乘函数F(x), 其等于:

通过求F(x)导数为零,获得x的最优值
求解这个非线性最小二乘的方法可以是牛顿法、高斯牛顿法、梯度下降法、列文伯格-马夸尔特法等
一、牛顿法
用目标函数的二阶泰勒展开近似该目标函数,通过求解这个二次函数的极小值来求解凸优化的搜索方向。
1、将F(x)在xk处进行泰勒展开,即:

此时,状态的更新式子为:
![]()
即此时求解的式子变为:
![]()
其中J为雅可比矩阵,即一阶导数矩阵
H为黑塞矩阵
通过求解上面线性方程,得到增量,叫牛顿法。
2、牛顿法具有超线性收敛性质,证明如下:
令
![]()
当获得最优值时,令导数为零,即

即

等式左右分别乘以

即

即
![]()
当
![]()
可得:

证毕
二、高斯牛顿法
高斯牛顿和牛顿法的区别在于牛顿法是对目标函数F二次偏导的迭代;高斯牛顿是分解目标函数F为f’*f后对f的一次偏导的迭代。
即此时不对F(x)展开,而是对f(x)展开,即
![]()
![]()


将上式变形为下面式子
![]()
可见和牛顿法获得了相同的等式形式。
但是此时H使用J^T * J近似;g = -J^T * f(x)
g函数是F(x)的一阶导数的转置,可见高斯牛顿和牛顿法的联系与区别
高斯牛顿方法虽然使用了雅可比矩阵乘积近似黑塞矩阵计算,但是雅可比矩阵乘积为奇异矩阵,此时会出现算法不收敛问题。
三、列文伯格-马夸尔特法(LM)
高斯牛顿法具有奇异性,即其可以在展开值附近有较好的优化结果,适合用于无约束优化。
LM针对高斯牛顿法的奇异性,增加了拉格朗日因子,保证了等式左边即HX始终正定。
此时优化问题变为

上式子的补充说明:
其中后面增加的那项就是通过拉格朗日乘子法,增加的拉格朗日因子约束。
拉格朗日乘子法是求优化函数f(x1,x2,x3,…,xn)在g(x1,x2,…xn)的约束条件下的极值方法。主要的思想是引入一个新的微小参数(拉格朗日乘子),将约束条件函数和原函数联系起来,使能配成与状态量数目相等的等式方程,保证等式的正定性。for an example:
对于优化函数f(x1,x2,x3,…,xn)的约束条件为A(x1,x2,x3,…,xn) = B;
设g(x1,x2,x3,…,xn)=B-A(x1,x2,x3,…,xn)
此时最小二乘优化函数变为
![]()
此时
![]()
变为
![]()
为简化计算,通常将D设为单位阵
其中H后面增加项(阻尼因子)会影响优化问题的梯度下降速度(收敛速度)。
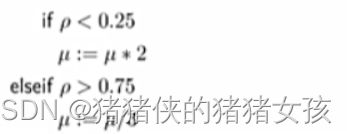
如果阻尼因子较大,下降速度加快,如果阻尼因子减少,下降速度变慢。为了更好地选择这个阻尼因子,LM算法引入了比例因子,即:
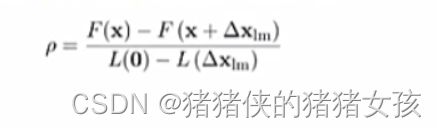
也就是说比例因子等于(实际差值)/(近似差值)
其中比例因子分母始终大于0,如果:
比例因子小于0,那么表示F(X)递增,此时与我们设计思路违背,即不符。
马夸尔特设置了一个阻尼因子策略如下:
四、ceres求解优化问题
这里面的ceres::Solver::Options设置了非线性优化的求解器的以下设置,可以选择高斯牛顿或者LM等求解方法
//
// Created by xiang on 18-11-19.
//
#include