vs配置opencv环境 opencv绘制海康相机
首先我们打开vs
创建一个控制台应用

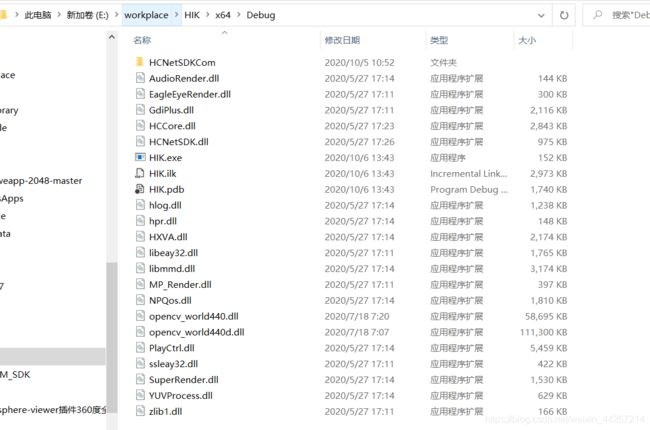
去上一层目录 然后选择×64 debug 讲海康相机以及opencv的dll文件复制进去
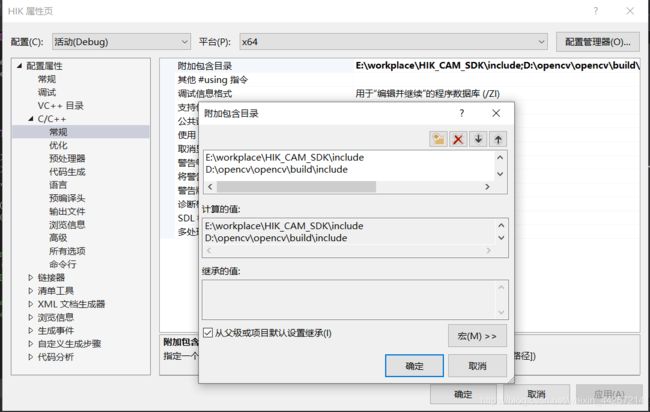
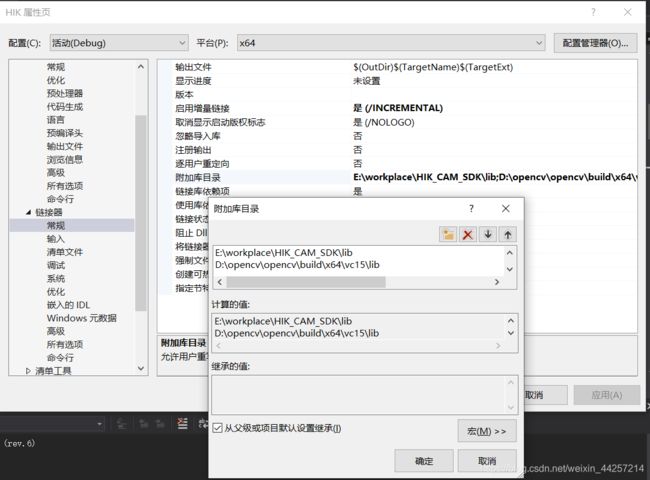
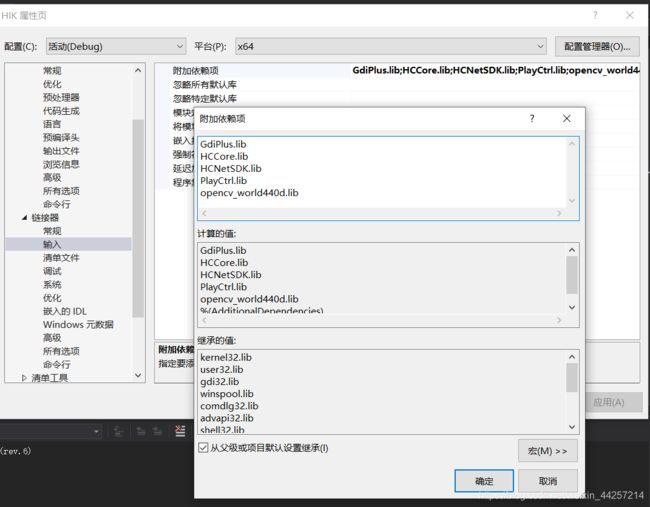
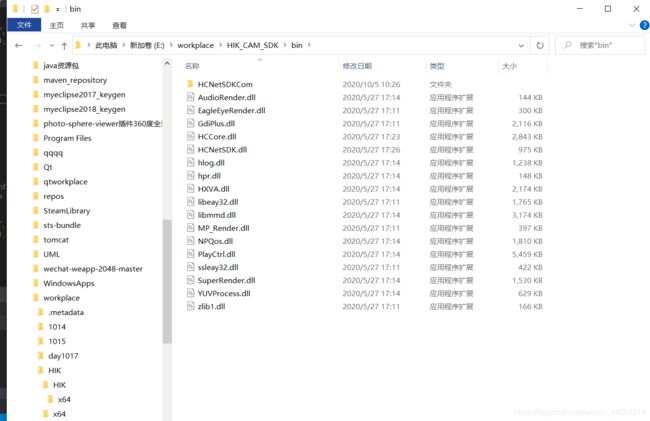
分别在opencv的这个目录下
以下是调用的代码
// HIK.cpp : 此文件包含 "main" 函数。程序执行将在此处开始并结束。
//
#include
#include
#include
#include
#include
#include
#include
//#include
using namespace std;
using namespace cv;
LONG nPort = -1;
HWND hPlayWnd = NULL;
FILE *Videofile = NULL;
FILE *Audiofile = NULL;
char filename[100];
int iPicNum = 0;//Set channel NO.
//
解码回调 视频为YUV数据(YV12),音频为PCM数据
void CALLBACK DecCBFun(long nPort, char * pBuf, long nSize, FRAME_INFO * pFrameInfo, long nReserved1, long nReserved2)
{
long lFrameType = pFrameInfo->nType;
if (lFrameType == T_AUDIO16)
{
// TRACE("Audio nStamp:%d\n", pFrameInfo->nStamp);
OutputDebugString("test_DecCb_Write Audio16 \n");
if (Audiofile == NULL)
{
sprintf(filename, "AudionPCM.pcm", iPicNum);
Audiofile = fopen(filename, "wb");
}
fwrite(pBuf, nSize, 1, Audiofile);
}
else if (lFrameType == T_YV12)
{
int w = pFrameInfo->nWidth;
int h = pFrameInfo->nHeight;
Mat yuv = Mat(h*1.5,w,CV_8UC1,pBuf);
Mat rgb = Mat(h, w, CV_8UC3);;
cvtColor(yuv, rgb, CV_YUV2RGB_I420);
namedWindow("rgb", 0);
imshow("rgb", rgb);
waitKey(5);
//TRACE("Video nStamp:%d\n", pFrameInfo->nStamp);
/*OutputDebugString("test_DecCb_Write YUV \n");
if (Videofile == NULL)
{
sprintf(filename, "VideoYV12.yuv", iPicNum);
Videofile = fopen(filename, "wb");
}
fwrite(pBuf, nSize, 1, Videofile);*/
}
else
{
}
}
//void CALLBACK fRealDataCallBack(LONG lRealHandle, DWORD dwDataType, BYTE *pBuffer, DWORD dwBufSize, void *pUser)
//{
// switch (dwDataType){
// case NET_DVR_SYSHEAD:
// cout << "1" << endl;
// break;
// case NET_DVR_STREAMDATA:
// cout << dwDataType << endl;
// break;
// default:
// break;
// }
//}
void CALLBACK fRealDataCallBack(LONG lRealHandle, DWORD dwDataType, BYTE *pBuffer, DWORD dwBufSize, void *pUser)
{
DWORD dRet = 0;
BOOL inData = FALSE;
switch (dwDataType)
{
case NET_DVR_SYSHEAD:
if (!PlayM4_GetPort(&nPort))
{
break;
}
if (!PlayM4_OpenStream(nPort, pBuffer, dwBufSize, 1024 * 1024))
{
dRet = PlayM4_GetLastError(nPort);
break;
}
//设置解码回调函数 只解码不显示
// if (!PlayM4_SetDecCallBack(nPort,DecCBFun))
// {
// dRet=PlayM4_GetLastError(nPort);
// break;
// }
//设置解码回调函数 解码且显示
if (!PlayM4_SetDecCallBackEx(nPort, DecCBFun, NULL, NULL))
{
dRet = PlayM4_GetLastError(nPort);
break;
}
//打开视频解码
if (!PlayM4_Play(nPort, hPlayWnd))
{
dRet = PlayM4_GetLastError(nPort);
break;
}
//打开音频解码, 需要码流是复合流
if (!PlayM4_PlaySound(nPort))
{
dRet = PlayM4_GetLastError(nPort);
break;
}
break;
case NET_DVR_STREAMDATA:
inData = PlayM4_InputData(nPort, pBuffer, dwBufSize);
//cout << dwDataType << endl;
while (!inData)
{
Sleep(10);
inData = PlayM4_InputData(nPort, pBuffer, dwBufSize);
OutputDebugString("PlayM4_InputData failed \n");
}
break;
default:
inData = PlayM4_InputData(nPort, pBuffer, dwBufSize);
while (!inData)
{
Sleep(10);
inData = PlayM4_InputData(nPort, pBuffer, dwBufSize);
OutputDebugString("PlayM4_InputData failed \n");
}
break;
}
}
int main()
{
LPNET_DVR_DEVICEINFO_V30 lpDeviceInfo = NULL;
char ip[16], userName[64], passWord[64];
NET_DVR_Init(); //HK SDK初始化
NET_DVR_SetConnectTime();
strcpy_s(ip, 16, "192.168.1.112");
strcpy_s(userName, 64, "admin");
strcpy_s(passWord, 64, "jk123456");
LONG userId = NET_DVR_Login_V30(ip,8000,userName,passWord,lpDeviceInfo);
if (userId < 0) {
cout << "Login Failed" << endl;
}
else
{
cout << "Login success, userId:" << userId << endl;
}
NET_DVR_CLIENTINFO ClientInfo;
ClientInfo.lChannel = 1; //Channel number 设备通道号
ClientInfo.hPlayWnd = NULL; //窗口为空,设备SDK不解码只取流
ClientInfo.lLinkMode = 0; //Main Stream
ClientInfo.sMultiCastIP = NULL;
LONG llRealHandle = NET_DVR_RealPlay_V30(userId, &ClientInfo, fRealDataCallBack,NULL,TRUE);
getchar();
if (llRealHandle < 0)
{
cout << "Failed to Start RealPlay" << endl;
return 0;
}
else {
cout << "Start RealPlay,playHnd =" <“开始执行(不调试)”菜单
// 调试程序: F5 或调试 >“开始调试”菜单
// 入门使用技巧:
// 1. 使用解决方案资源管理器窗口添加/管理文件
// 2. 使用团队资源管理器窗口连接到源代码管理
// 3. 使用输出窗口查看生成输出和其他消息
// 4. 使用错误列表窗口查看错误
// 5. 转到“项目”>“添加新项”以创建新的代码文件,或转到“项目”>“添加现有项”以将现有代码文件添加到项目
// 6. 将来,若要再次打开此项目,请转到“文件”>“打开”>“项目”并选择 .sln 文件