opencv之案例实战-扫描件切边
场景
- 扫描仪扫描到法律文件有白边,需要切掉,看上去比较真实
- 人工操作成本高时间久
- 希望程序自动实现,高效、准确
解决思路
- 方法一:通过边缘检测+轮廓发现或者直线检测最大外矩形框实现
- 方法二:通过二值分割+形态学方法+Hough直线找到最大外接矩形
相关API
函数原型
void cv::warpAffine (
InputArray src,
OutputArray dst,
InputArray M,
Size dsize,
int flags = INTER_LINEAR,
int borderMode = BORDER_CONSTANT,
const Scalar & borderValue = Scalar()
)
参数介绍
- src: 输入图像
- dst: 输出图像,尺寸由dsize指定,图像类型与原图像一致
- M: 2X3的变换矩阵
- dsize: 指定图像输出尺寸
- flags: 插值算法标识符,有默认值INTER_LINEAR,如果插值算法为WARP_INVERSE_MAP
| INTER_NEAAREST | 最临近插值算法 |
|---|---|
| INTER_LINEAR | 线性插值算法 |
| INTER_CUBIC | 双立方插值算法 |
| INTER_AREA | 区域插值算法(使用像素区域关系的重采样时图像抽取的首选方法,但是当图像被放大,它类似与INTER_NEAREST方法) |
| INTER_LANCZOS4 | Lanczos插值算法(超过8×8)邻域的插值算法 |
| INTER_MAX | 用于插值的掩模板 |
| WARP_FILL_OUTLIERS | 标志位,用于填充目标图像的像素值,如果其中一些值对应于原图像中的异常值,那么这些值将被设置为0 |
| WARP_INVERSE_MAP | 标志位,反变换 |
- borderMode: 边界像素模式,有默认值BORDER_CONSTANT
- borderValue: 边界取值,有默认值Scalar()即0
函数api
Mat cv::getRotationMatrix2D ( Point2f center,
double angle,
double scale
)
参数介绍
- center: Point2f类型,表示原图像的旋转中心
- angle: double类型,表示图像旋转角度,角度为正则表示逆时针旋转,角度为负表示逆时针旋转(坐标原点是图像左上角)
- scale: 缩放系数
代码演示
#include 程序运行效果
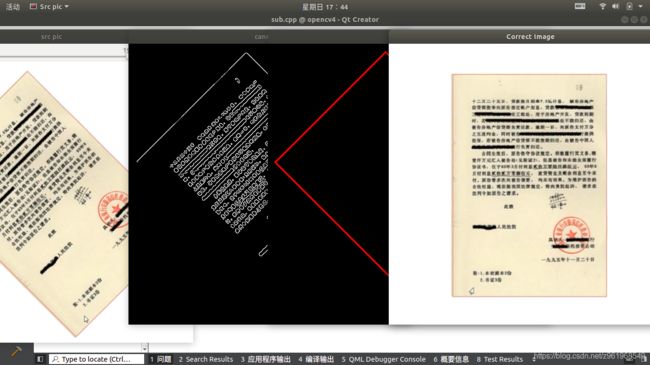
切边
将纠正后的图片存储下来,基本属于再次运行一遍代码,即可得到文档本身,得到去除白边的文档
#include 程序运行效果
