《自动控制原理》学习笔记————个人整理
1、自动控制基础概念
自动控制:是指在无人直接参与的情况下,利用外加的设备或装置,使机器、设备或生产过程的某个工作状态或参数自动地按照预定的规律运行。
开环控制:开环控制系统是指无被控量反馈的系统,即在系统中控制信息的流动未形成闭合回路。
闭环控制:有被控量反馈的控制,即系统的输出信号沿反馈通道又回到系统的输入端,构成闭合通道,也叫做反馈控制。
自动控制系统的任务:被控量和给定值,在任何时候都相等或保持一个固定的比例关系,没有任何偏差,而且不受干扰的影响。
系统的动态过程:也称为过渡过程,是指系统受到外加信号(给定值或干扰)作用后,被控量随时间变化的全过程。
自动控制的性能指标:反映系统控制性能优劣的指标,工程上常常从稳定性、快速性、准确性三个方面来评价。
2、数学模型基础
2.1 控制系统数学模型的概念
描述控制系统输入、输出变量以及内部各变量之间关系的数学表达式,称为系统的数学模型。
2.2 建立数学模型的方法
一是机理分析建模方法,称为分析法;
二是实验建模方法,称为系统辨识。
常用模型:
1、外部描述模型——微分方程、传递函数
2、内部描述模型——状态空间法
3、信号流图模型
3、线性系统的时域数学模型
3.1 微分方程
是控制系统最基本的数学模型,要研究系统的运动,必须列写出系统的微分方程。
一个控制系统由若干具有不同功能的元件组成,首先要根据各个元件的物理规律,列写出各个元件的微分方程,得到一个微分方程组,然后消去中间变量,即得控制系统总的输入和输出的微分方程。
3.2 传递函数
控制系统的微分方程是在时间域描述系统动态性能的数学模型,在给定外部作用和初始条件下,求解微分方程可以得到系统的输出响应。这种方法比较直观。
拉普拉斯变换是求解线性微分方程的有力工具,他可以将时域的微分方程转化为复频域中的代数方程,并且可以得到控制系统在复数域中的数学模型——传递函数。

传递函数:线性定常系统在零初始条件下,系统输出量的拉氏变换与输入量的拉氏变换之比。
传递函数的几点说明:
1、作为一种数学模型,传递函数只适用于线性定常系统,这是由于传递函数是经拉普拉斯变换导出的,而拉式变换是一种线性积分运算。
2、线性定常系统或元件的线性定常微分方程与传递函数一一对应,它们是在不同域对同一系统或元件的描述。
3、传递函数是表征线性定常系统或元件自身的固有特性,它与其输入信号的形式无关,但和输入信号的作用位置及输出信号的取出位置有关。所以谈到传递函数,必须指明输入量和输出量。
4、传递函数是复变量 的有理分式,且分子、分母多项式的各项系数均为实数,分母多项式的次数
的有理分式,且分子、分母多项式的各项系数均为实数,分母多项式的次数 大于等于分子多项式的次数,。
大于等于分子多项式的次数,。
5、传递函数是在零初始条件下定义的。控制系统的零初始条件有两层含义:
一是指输入量在时间才起作用;
二是指输入量加于系统前,系统处于稳定工作状态。
6、传递函数只表示单输入和单输出(SISO)之间的关系,对多输入多输出(MIMO)系统,可用传递函数阵表示。
7、传递函数式可表示成
式中,为分母多项式的根,称为传递函数的极点;为分子多项式的根,称为传递函数的零点;称为传递函数的增益。
8、传递函数的分母多项式称为特征多项式,记为
而称为特征方程。
传递函数分母多项式的阶数总是大于或等于分子多项式的阶次,即。这是由于实际系统的惯性所造成的。
9、实际工程中,许多不同的物理系统具有完全相同的传递函数,所以传递函数只描述了输出与输入之间的关系,并不提供任何有关该系统的物理结构。
10、一个传递函数只适用于单输入、单输出系统,因而信号在传递过程中的中间变量是无法反映出来的。
11、对于系统未知的传递函数,可通过给系统加上已知特性的输入,再对其输出进行研究,就可以得到该系统传递函数,并可以给出其动态特性的完整描述。
12、传递函数的拉式反变换是系统对应的脉冲响应。
4、结构图
- 微分方程、传递函数等数学模型。都是用纯数学表达式来描述系统特性,不能反映系统中各元部件对整个系统性能的影响,而系统原理图、职能方框图虽然反映了系统的物理结构,但又缺少系统中各变量间的定量关系。
- 结构图既能描述系统中各变量间的定量关系,又能明显地表示系统各部件对系统性能的影响。
- 控制系统都是由一些元部件组成,根据不同的功能,将系统划分为若干环节或者子系统,每个子系统的功能都可以用一个单向性的函数方快来表示。
- 根据系统中信息的传递方向,将各个子系统的函数方块用信号线顺次连接起来,就构成了系统的结构图,又称为系统的方块图。
结构图的串并联与反馈连接:

自控系统的典型结构:



- 系统的数学模型有三种形式:微分方程、传递函数和动态结构图。三者之间通过拉式变换可以方便地相互转换。在自动控制系统分析中以传递函数和动态结构图最为常见。
- 通过对结构图的化简运算,可以方便地得到系统的传递函数;动态结构图的等效变换和梅逊公式是求系统传递函数的有效工具。
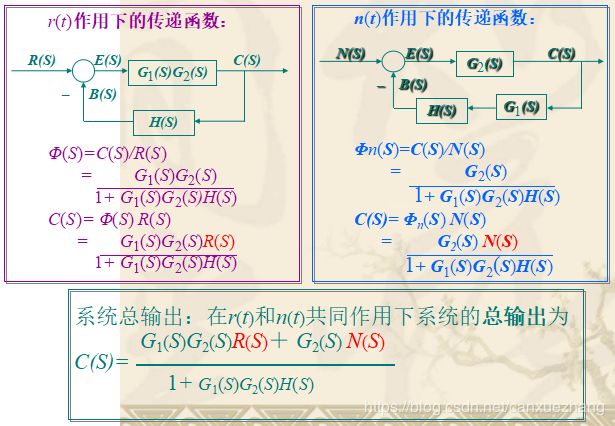
- 系统的传递函数可分为开环传递函数、闭环传递函数和误差传递函数,其中闭环传递函数和误差传递函数又分为给定输入和干扰输入作用的情况,并由此可求得系统在给定量和干扰作用下的总输出以及系统的总误差。
5、信号流图
- 比较复杂的控制系统的结构图往往是多回路的,并且是交叉的。这种情况下,对结构图进行简化是很麻烦的,而且很容易出错。如果把结构图变换为信号流图,再利用梅逊公式去求系统的传递函数,就比较方便了。
- 信号流图是由节点和支路组成的一种信号传递网络。
- 在信号流图中,小圆圈表示变量或信号,称为节点。
- 连接两节点的线段称为支路,信号只能由支路的箭头方向传递。
- 标在支路旁边的数学算子称为传递函数或传递增益。传递增益可以是常数,也可以是复变函数。当传递函数为1时可以不标。
- 信号在支路上沿箭头单向传递。
- 支路相当于乘法器,信号流经支路时,被乘以支路增益而变成另一信号。
- 对一个给定系统,信号流图不是唯一的。
- 用信号流图表示方程组的基本法则为:支路终点信号等于始点信号乘以支路传递函数。
例如,代数方程可以表示为下图所示的信号流图。
![]()
信号流图中常用的名词术语:

- 源节点(输入节点):在源节点上,只有信号输出支路而没有信号输入的支路,它一般代表系统的输入变量。
- 阱节点(输出节点):在阱节点上,只有信号输入的支路而没有信号输出的支路,它一般代表系统的输入变量。
- 混合节点:在混合节点上,既有信号输出的支路而又有信号输入的支路。
- 通路:沿支路箭头方向而穿过各相连支路的途径。如果通路与任一节点相交不多于一次,就叫开通路。
- 前向通路:信号从输入节点到输出节点传递时,每个节点只通过一次的通路,叫前向通路。
- 前向通路总增益:前向通路上各支路增益之乘积称前向同路总增益,一般用表示。
- 回路:起点和终点在同一节点,而且信号通过每一节点不多于一次的闭合通路称回路。
- 回路增益:回路上各支路增益之乘积称为回路增益,一般用表示。
- 不接触回路:回路之间没有公共节点时,称它们为不接触回路。
6、梅逊公式
梅逊公式是美国麻省理工学院S.J.Mason于20世纪50年代提出的。借助于梅逊公式,不经任何结构变换,便可以得到系统的传递函数。
梅逊公式的表达式为:
:待求的总传递函数。
 称为特征式。
称为特征式。
:所有回路( 条)的回路增益之和。
条)的回路增益之和。
:所有两两互不接触回路( 条)的回路增益乘积之和。
条)的回路增益乘积之和。
:所有三三互不接触回路( 条)的回路增益乘积之和。
条)的回路增益乘积之和。
 :从输入节点到输出节点第
:从输入节点到输出节点第 条前向通路的增益。
条前向通路的增益。
 :在中,将与第条前向通路相接触的回路去掉后所余下的部分的,称为余子式。
:在中,将与第条前向通路相接触的回路去掉后所余下的部分的,称为余子式。
 :从输入节点到输出节点所有前向通路的条数。
:从输入节点到输出节点所有前向通路的条数。
【例题1】

【解】
共有四个回路,n=4。
回路 与
与 、回路
、回路 与互不接触,
与互不接触,
没有三个之间互不接触回路,
故得特征式:
只有一条前向通路,且。
由于所有回路均与前向通路相接触,故余子式。
所以系统的总传递函数为:
【例题2】
对例2用梅逊公式求解,得出系统传递函数。

【解】
没有两个及两个以上互不接触的回环,故
前向通路
余子式
故