OpenCV中的Mat
1、Mat类
包含:
a、矩阵头(包含矩阵尺寸、存储方法、存储地址等)
b、一个指向存储所有像素值的矩阵的指针(根据所选存储方法的不同,矩阵可以是不同的维数)
其中需要注意的是:
Mat在进行赋值拷贝时,只复制矩阵头,而不复制矩阵,提高效率。如果矩阵属于多个Mat对象,则通过引用计数来判断,当最后一个使用它的对象,则负责释放矩阵。
可以使用clone和copyTo函数,不仅复制矩阵头还复制矩阵。
2、Mat创建
a、使用Mat构造函数
Mat test(2,2,CV_8UC3,Scalar(0,0,255));
b、使用Mat构造函数2
int sizes[3] = {2,2,2};
Mat test(3,sizes,CV_8UC3,Scalar::all(0));
c、为已存在的IplImage指针创建信息头
IplImage* img = cvLoadImage("1.jpg",1);
Mat test(img);
d、利用create函数
Mat test;
test.create(4,4,CV_8UC2);
e、采用Matlab形式的初始化方式
(i)Mat me = Mat::eye(4,4,CV_64F);
(ii)Mat mo = Mat::ones(2,2,CV_32F);
(iii)Mat mz = Mat::zeros(3,3,CV_8UC1);
注:元素类型,即CV_[位数][带符号与否][类型前缀]C[通道数]
3、Mat中相关成员的意义
a、data
Mat对象中的一个指针,指向存放矩阵数据的内存(uchar* data)
b、dims
矩阵的维度,3*4的矩阵维度为2维,3*4*5的矩阵维度为3维
c、channels
矩阵通道,矩阵中的每一个矩阵元素拥有的值的个数,比如说 3 * 4 矩阵中一共 12 个元素,如果每个元素有三个值,那么就说这个矩阵是 3 通道的,即 channels = 3。常见的是一张彩色图片有红、绿、蓝三个通道。
d、depth
深度,即每一个像素的位数,也就是每个通道的位数。在opencv的Mat.depth()中得到的是一个0 – 6的数字,分别代表不同的位数:enum { CV_8U=0, CV_8S=1, CV_16U=2, CV_16S=3, CV_32S=4, CV_32F=5, CV_64F=6 },可见 0和1都代表8位, 2和3都代表16位,4和5代表32位,6代表64位。depth也是一系列的预定义值。
e、elemSize
矩阵中每个元素的大小,每个元素包含channels个通道。如果Mat中的数据的数据类型是CV_8U那么elemSize = 1;是CV_8UC3那么elemSize = 3,是CV_16UC2那么elemSize = 4。表示每个元素有多少个字节。
f、elemSize1
矩阵中数据类型的大小,即elemSize/channels,也就是depth对应的位数。表示每个元素的每个通道有多少个字节。
g、step
是一个数组,定义了矩阵的布局,参考下图
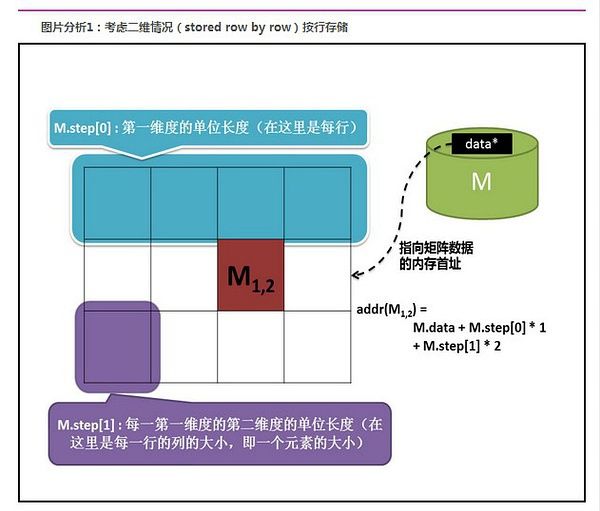
若矩阵有n维,则step数组大小为n
step[n-1] = elemSize(每个矩阵元素的数据大小)
step[n-2] = size(1维)*elemSize
step[n-3] = size(2维)*size(1维)*elemSize
...
step[0] = size(n-1维)*size(n-2维)*...size(1维)*elemSize
h、step1
step1也是一个数组,为step/elemSize1,若矩阵有n维,则step1[n-1] = channels。
i、type
矩阵元素的类型,即创建Mat时传递的类型,例如CV_8UC3、CV_16UC2等。
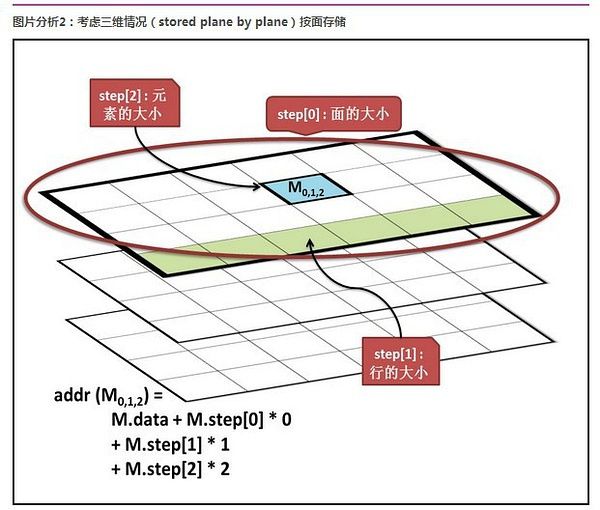
j、三维Mat按照面、线、点存储。
转载于:OpenCV中Mat的使用,有修改。