SSD算法简单介绍
SSD算法
论文连接SSD: Single Shot MultiBox Detector
SSD,全称Single Shot MultiBox Detector,是目前主要的检测框架之一,其基于将detection转化为regression的思路,可以一次完成目标定位与分类。该算法基于Faster RCNN中的Anchor,提出了相似的Prior box;该算法修改了传统的VGG16网络:将VGG16的FC6和FC7层转化为卷积层,如图1上的Conv6和Conv7;去掉所有的Dropout层和FC8层;添加了Atrous算法(hole算法),将Pool5从2x2-S2变换到3x3-S1,同时加入基于特征金字塔(Pyramidal Feature Hierarchy)的检测方式,即在不同感受野的feature map上预测目标。
SSD算法工作流程
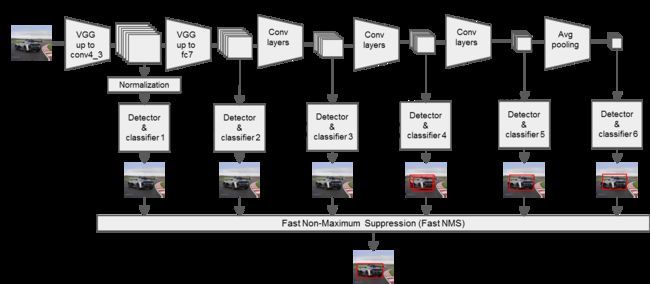
- 输入一幅图片,将其输入到预训练好的分类网络中来获得不同大小的特征映射;
- 抽取Conv4_3、Conv7、Conv8_2、Conv9_2、Conv10_2、Conv11_2层的feature map,然后分别在这些feature map层上面的每一个点构造6个不同尺度大小的BB(bounding box),然后分别进行检测和分类,生成多个BB,如图1所示;
- 将不同feature map获得的BB结合起来,经过NMS(非极大值抑制)方法来抑制掉一部分重叠或者不正确的BB,生成最终的BB集合(即检测结果)。
下图为SSD算法的工作流程图:
Defalut box生成规则
为提高目标的识别准确度,该网络预设了多种尺度的目标检测框(Defalut box),每个目标检测框获得的feature map通过softmax分类+bounding box regression获得真实目标的位置。Defalut box是以feature map上每个点的中点为中心(offset=0.5),生成一系列同心的Defalut box(然后中心点的坐标会乘以step,相当于从feature map位置映射回原图位置),使用m(SSD300中m=6)个不同大小的feature map 来做预测,最底层的 feature map 的 scale 值为 Smin=0.2,最高层的为Smax=0.95,其他层通过下面的公式计算得到:
s k = s m i n + s m a x − s m i n m − 1 ( k − 1 ) s_k=s_{min}+\frac{s_{max}-s_{min}}{m-1}(k-1) sk=smin+m−1smax−smin(k−1)
LOSS计算
SSD算法的目标函数分为两部分:计算相应的default box与目标类别的confidence loss以及相应的位置回归(location loss)。总体loss计算为:
L ( x , c , l , g ) = 1 N ( L c o n f ( x , c ) + α L l o c ( x , l , g ) ) L(x,c,l,g)=\frac{1}{N}(L_{conf} (x,c)+αL_{loc} (x,l,g)) L(x,c,l,g)=N1(Lconf(x,c)+αLloc(x,l,g))
其中N是match到Ground Truth的default box数量;而α参数用于调整confidence loss和location loss之间的比例,默认α=1;
位置回归则是采用 Smooth L1 loss计算预测框box(l)和真值框box(g)直接的loss,其函数表示为:
L l o c ( x , l , g ) = ∑ ∈ P o s N ∑ m ∈ c x , c y , w , h x i j k s m o o t h L 1 ( l i m − g ^ j m ) L_{loc} (x,l,g)=\sum_{\in{Pos}}^{N}\sum_{m\in{cx,cy,w,h}}x_{ij}^{k}{smooth}_{L1}(l_{i}^{m}-\hat{g}_{j}^{m}) Lloc(x,l,g)=∈Pos∑Nm∈cx,cy,w,h∑xijksmoothL1(lim−g^jm)
g ^ j c x = ( g j c y − d i c y ) / d i h \hat{g} _j^cx=(g_j^cy-d_i^cy)/d_i^h g^jcx=(gjcy−dicy)/dih
g ^ j w = l o g ( ( g j w ) / ( d i w ) ) \hat{g}_j^w=log{((g_j^w)/(d_i^w ))} g^jw=log((gjw)/(diw))
g ^ j h = l o g ( ( g j h ) / ( d i h ) ) \hat{g}_j^h=log{((g_j^h)/(d_i^h ))} g^jh=log((gjh)/(dih))
其中i为预测框序号,j为真值框序号,(cx,cy)是default box(d)的中心坐标,w,h分别是default box(d)的宽和高。
计算相应的default box与目标类别的Confidence loss是:
L c o n f ( x , c ) = − ∑ i ∈ P o s N x i j p l o g ( c ^ i p ) − ∑ i ∈ N e g l o g c ^ i 0 L_{conf} (x,c)=-\sum_{i\in{Pos}}^{N}x_{ij}^{p}log{(\hat{c}_i^p)}-\sum_{i\in{Neg}} log{\hat{c}_{i}^{0}} Lconf(x,c)=−i∈Pos∑Nxijplog(c^ip)−i∈Neg∑logc^i0
其中 c ^ i p = e c i p ∑ p e c i p \hat{c} _{i}^{p}=\frac{e^{c_i^p}} {\sum_{p}e^{c_{i}^{p}}} c^ip=∑pecipecip 。 c i p c_i^p cip是分类器前级输出单元的输出, i i i表示类别索引,总得类别个数为 p p p, c ^ i p \hat{c}_i^p c^ip表示的是当前元素的指数与所有元素指数和的比值。
极大值抑制(NMS)筛选
将所有生成的default boxes全部用NMS(极大值抑制)进行筛选,得到最终的目标区域;
f ( x ) = { S i i o u ( M , b i ) < N t S i ( 1 − i o u ( M , b i ) ) i o u ( M , b i ) < N t f(x)=\left\{ \begin{array}{lcl} S_i & & iou(M,b_i)
其中 N t N_t Nt是NMS的阈值, b i b_i bi是检测的bounding box, s i s_i si是对应 b i b_i bi框的置信度, M M M是所有检测框的并集。