基于改进CRNN的代码&缩进排版检测系统(源码&教程)
1.研究背景
代码的识别与自动重构是近年来软件工程的热点领域之一,而重复代码是一种在软件工程中较为常见的代码.本文在基于文本的重复代码识别方法的基础上,通过词法分析对特定的Token作出处理后再对源代码进行对比,最后通过语法树的对比来对结果进行过滤以降低误报率.测试结果表明该方法对于重复代码有着较好的识别效果.对重复代码的自动识别算法研究有着借鉴意义,在软件的质量、维护等领域上也具有广泛的应用需求.
2.图片演示


3.视频演示
基于改进CRNN的代码&缩进排版检测系统(源码&教程)_哔哩哔哩_bilibili
4.CRNN简介
是目前较为流行的图文识别模型,可识别较长的文本序列, 它利用BLSTM和CTC部件学习字符图像中的上下文关系, 从而有效提升文本识别准确率,使得模型更加鲁棒。 CRNN是一种卷积循环神经网络结构,用于解决基于图像的序列识别问题,特别是场景文字识别问题。 文章认为文字识别是对序列的预测方法,所以采用了对序列预测的RNN网络。通过CNN将图片的特征提取出来后采用RNN对序列进行预测,最后通过一个CTC的翻译层得到最终结果。说白了就是CNN+RNN+CTC的结构。
CRNN 全称为 Convolutional Recurrent Neural Network,主要用于端到端地对不定长的文本序列进行识别,不用先对单个文字进行切割,而是将文本识别转化为时序依赖的序列学习问题,就是基于图像的序列识别。
原文链接:https://blog.csdn.net/bestrivern/article/details/91050960

5.CRNN改进
基于mobilenetv3的CRNN
mobilenetv3没有官网实现,高星实现: mobilenetv3为基础模型。
如下图红框部分所示,将倒数3个s 由2改为(2,1)

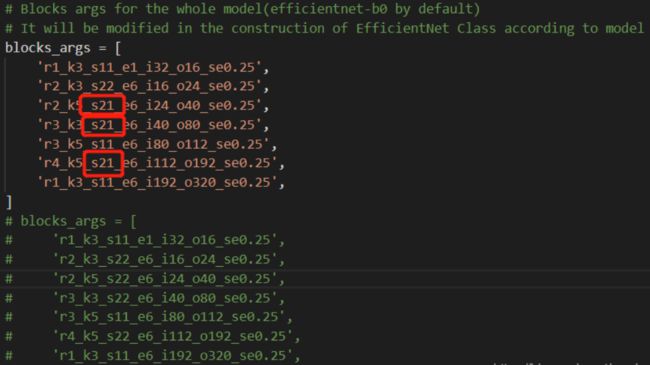
基于efficientnet的CRNN
efficientnet没有官网实现,高星实现: efficientnet为基础模型
如下图红框部分所示,将倒数3个s 由s22改为s21
6.代码实现
# CRNN网络模型
#################### 自己写的代码这里开始 ###################
class CRNN(object):
def __init__(self,
num_classes, # 类别数量
label_dict): # 标签字典
self.outputs = None # 输出
self.label_dict = label_dict # 标签字典
self.num_classes = num_classes # 类别数量
def name(self):
return "crnn"
def conv_bn_pool(self, input, group, # 输入,组
out_ch, # 输入通道数
act="relu", # 激活函数
param=None, bias=None, # 参数、权重初始值
param_0=None, is_test=False,
pooling=True, # 是否执行池化
use_cudnn=False): # 是否对cuda加速
tmp = input
for i in six.moves.xrange(group):
# for i in range(group): # 也可以
# 卷积层
tmp = fluid.layers.conv2d(
input=tmp, # 输入
num_filters=out_ch[i], # num_filters (int) - 滤波器(卷积核)的个数。和输出图像通道相同。
filter_size=3,##滤波器大小
padding=1,##填充大小
param_attr=param if param_0 is None else param_0,##指定权重参数属性的对象
act=None,
use_cudnn=use_cudnn)
# 批量归一化
tmp = fluid.layers.batch_norm(
input=tmp, # 前面卷基层输出作为输入
act=act, # 激活函数
param_attr=param, # 参数初始值
bias_attr=bias, # 偏置初始值
is_test=is_test) # 测试模型
# 根据传入的参数决定是否做池化操作
if pooling:
tmp = fluid.layers.pool2d(
input=tmp, # 前一层的输出作为输入
pool_size=2, # 池化区域
pool_type="max", # 池化类型
pool_stride=2, # 步长
use_cudnn=use_cudnn,
ceil_mode=True) # 输出高度计算公式
return tmp
# 包含4个卷积层操作
def ocr_convs(self, input,
regularizer=None, # 正则化
gradient_clip=None, # 梯度裁剪,防止梯度过大
is_test=False, use_cudnn=False):
###创建一个参数属性对象,用户可设置参数的名称、初始化方式、学习率、正则化规则、是否需要训练、梯度裁剪方式、是否做模型平均等属性。
b = fluid.ParamAttr(
regularizer=regularizer,
gradient_clip=gradient_clip,
initializer=fluid.initializer.Normal(0.0, 0.0))
w0 = fluid.ParamAttr(
regularizer=regularizer,
gradient_clip=gradient_clip,
initializer=fluid.initializer.Normal(0.0, 0.0005))
w1 = fluid.ParamAttr(
regularizer=regularizer,
gradient_clip=gradient_clip,
initializer=fluid.initializer.Normal(0.0, 0.01))
tmp = input
# 第一组卷积池化
tmp = self.conv_bn_pool(tmp,
2, [16, 16], # 组数量及卷积核数量
param=w1,
bias=b,
param_0=w0,
is_test=is_test,
use_cudnn=use_cudnn)
# 第二组卷积池化
tmp = self.conv_bn_pool(tmp,
2, [32, 32], # 组数量及卷积核数量
param=w1,
bias=b,
is_test=is_test,
use_cudnn=use_cudnn)
# 第三组卷积池化
tmp = self.conv_bn_pool(tmp,
2, [64, 64], # 组数量及卷积核数量
param=w1,
bias=b,
is_test=is_test,
use_cudnn=use_cudnn)
# 第四组卷积池化
tmp = self.conv_bn_pool(tmp,
2, [128, 128], # 组数量及卷积核数量
param=w1,
bias=b,
is_test=is_test,
pooling=False, # 不做池化
use_cudnn=use_cudnn)
return tmp
# 组网
def net(self, images,
rnn_hidden_size=200, # 隐藏层输出值数量
regularizer=None, # 正则化
gradient_clip=None, # 梯度裁剪,防止梯度过大
is_test=False,
use_cudnn=True):
# 卷积池化
conv_features = self.ocr_convs(
images,
regularizer=regularizer,
gradient_clip=gradient_clip,
is_test=is_test,
use_cudnn=use_cudnn)
# 将特征图转为序列
sliced_feature = fluid.layers.im2sequence(
input=conv_features, # 卷积得到的特征图作为输入
stride=[1, 1],
# 卷积核大小(高度等于原高度,宽度1)
filter_size=[conv_features.shape[2], 1])
# 两个全连接层
para_attr = fluid.ParamAttr(
regularizer=regularizer, # 正则化
gradient_clip=gradient_clip,
initializer=fluid.initializer.Normal(0.0, 0.02))
bias_attr = fluid.ParamAttr(
regularizer=regularizer, # 正则化
gradient_clip=gradient_clip,
initializer=fluid.initializer.Normal(0.0, 0.02))
bias_attr_nobias = fluid.ParamAttr(
regularizer=regularizer, # 正则化
gradient_clip=gradient_clip,
initializer=fluid.initializer.Normal(0.0, 0.02))
fc_1 = fluid.layers.fc(
input=sliced_feature, # 序列化处理的特征图
size=rnn_hidden_size * 3,
param_attr=para_attr,
bias_attr=bias_attr_nobias)
fc_2 = fluid.layers.fc(
input=sliced_feature, # 序列化处理的特征图
size=rnn_hidden_size * 3,
param_attr=para_attr,
bias_attr=bias_attr_nobias)
# 双向GRU(门控循环单元,LSTM变种, LSTM是RNN变种)
gru_foward = fluid.layers.dynamic_gru(
input=fc_1,
size=rnn_hidden_size,
param_attr=para_attr,
bias_attr=bias_attr,
candidate_activation="relu")
gru_backward = fluid.layers.dynamic_gru(
input=fc_2,
size=rnn_hidden_size,
is_reverse=True, # 反向循环神经网络
param_attr=para_attr,
bias_attr=bias_attr,
candidate_activation="relu")
# 输出层
w_attr = fluid.ParamAttr(
regularizer=regularizer,
gradient_clip=gradient_clip,
initializer=fluid.initializer.Normal(0.0, 0.02))
b_attr = fluid.ParamAttr(
regularizer=regularizer,
gradient_clip=gradient_clip,
initializer=fluid.initializer.Normal(0.0, 0.0))
fc_out = fluid.layers.fc(
input=[gru_foward, gru_backward], # 双向RNN输出作为输入
size=self.num_classes + 1, # 输出类别
param_attr=w_attr,
bias_attr=b_attr)
self.outputs = fc_out
return fc_out
def get_infer(self):
# 将CRNN网络输出交给CTC层转录(纠错、去重)
return fluid.layers.ctc_greedy_decoder(
input=self.outputs, # 输入为CRNN网络输出
blank=self.num_classes)
7.系统整合
下图完整源码&环境部署视频教程&自定义UI界面:

参考博客《基于改进CRNN的代码&缩进排版检测系统(源码&教程)》
8.参考文献
[1]杨勋姮,段明璐.软件缺陷分析技术的研究[J].软件.2018,(2).DOI:10.3969/j.issn.1003-6970.2018.02.019.
[2]段明璐.软件故障树算法建模的研究[J].软件.2018,(2).DOI:10.3969/j.issn.1003-6970.2018.02.015.
[3]印杰,李千目.软件代码漏洞的电子取证技术综述[J].软件.2015,(12).DOI:10.3969/j.issn.1003-6970.2015.12.012.
[4]翁秀木.一个通用的软件质量评估指标体系[J].软件.2015,(3).DOI:10.3969/j.issn.1003-6970.2015.03.012.
[5]史庆庆,孟繁军,张丽萍,等.克隆代码技术研究综述[J].计算机应用研究.2013,(6).DOI:10.3969/j.issn.1001-3695.2013.06.004.
[6]郭婧,吴军华.基于程序依赖图的克隆检测及改进[J].计算机工程与设计.2012,(2).DOI:10.3969/j.issn.1000-7024.2012.02.036.
[7]于冬琦,吴毅坚,彭鑫,等.基于相似性度量的面向对象程序方法级克隆侦测[J].电子学报.2010,(z1).
[8]于冬琦,彭鑫,赵文耘.使用抽象语法树和静态分析的克隆代码自动重构方法[J].小型微型计算机系统.2009,(9).
[9]James R. Cordy,Rainer Koschke,Chanchal K. Roy.Comparison and evaluation of code clone detection techniques and tools: A qualitative approach[J].Science of Computer Programming.2009,74(7).
[10]Matthias Rieger,Stephane Ducasse,Oscar Nierstrasz.On the effectiveness of clone detection by string matching[J].Journal of Software Maintenance & Evolution: Research & Practice.2006,18(1).