ros学习之串口通信(数据读取),并进行发布
串口参数:
波特率:9600
起始位:1
数据位:8
停止位:1
奇偶校验:无
例如超声波模组地址为0X01,则主机发送
0X55 0XAA 0X01 0X01 checksum
checksum=(帧头+用户地址+指令)&0x00ff=0x01
unsigned char all_data[5] = {0x55,0xAA,0x01,0x01,0x01}; //声明发出指令(帧头(0x55,0xAA),地址(0x01、0x02、0x03),指令(0x10),checksum)
超声波传感器发送指令周期需大于等于250ms。
在这里插入代码片
#include 其中 ros::Rate loop_rate(4)和loop_rate.sleep()需要同时用才可以控制发布频率。
ros::Rate loop_rate写在循环外部,loop_rate.sleep写在循环内部。
ros::spinOnce()的作用是集中处理本节点的所有回调函数。当程序运行到spinOnce()时,程序到相应的topic订阅缓存区查看是否存在消息,如果有消息,则将消息传入回调函数执行回调函数;如果没有消息则继续向后执行。spinOnce()并不是等待到一个消息才向后执行,而是查看有没有消息。
运行成功截图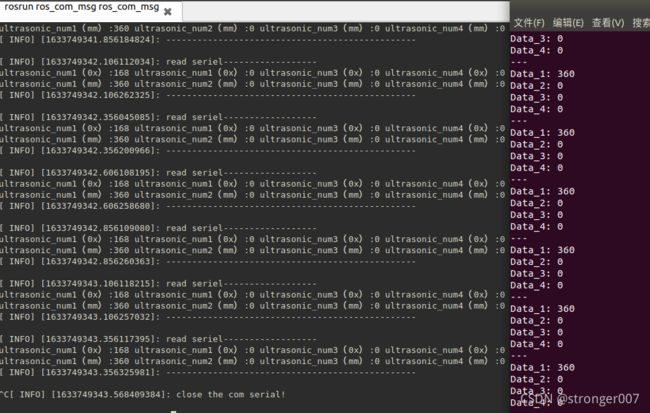 com.msg放进msg(功能包ros_com_msg下的msg文件)
com.msg放进msg(功能包ros_com_msg下的msg文件)
com.msg的代码
int16 Data_1
int16 Data_2
int16 Data_3
int16 Data_4
ros_com_msg.h的代码
#ifndef ROS_COM_MSG_H
#define ROS_COM_MSG_H
#include 在CMakeList.txt 添加编译选项
find_package(catkin REQUIRED COMPONENTS
roscpp
rospy
std_msgs
message_generation
serial
geometry_msgs
)
-----------------------------------------------
## Generate messages in the 'msg' folder
add_message_files(
FILES
com.msg
)
-----------------------------------------------
## Generate added messages and services with any dependencies listed here
generate_messages(
DEPENDENCIES
std_msgs
)
-----------------------------------------------
catkin_package(
# INCLUDE_DIRS include
# LIBRARIES ros_com_msg
# CATKIN_DEPENDS roscpp std_msgs
# DEPENDS system_lib
# message_runtime
CATKIN_DEPENDS message_runtime roscpp std_msgs
)
在package.xml添加功能包依赖
<build_depend>message_generation</build_depend>
<exec_depend>message_runtime</exec_depend>
<buildtool_depend>catkin</buildtool_depend>
<build_depend>roscpp</build_depend>
<build_depend>std_msgs</build_depend>
<build_export_depend>roscpp</build_export_depend>
<build_export_depend>std_msgs</build_export_depend>
<exec_depend>roscpp</exec_depend>
<exec_depend>std_msgs</exec_depend>