yolov5 学习记录
目录
- 理论
-
- 卷积神经网络
- 实践
-
- win安装
-
- anaconda下安装yolo
- linux安装
- 使用
-
- 自定义训练
- 打印坐标(像素)信息
- 变量类型
- 结合ROS
理论
卷积神经网络
卷积神经网络(Convolutional Neural Networks, CNN)是一类包含卷积计算且具有深度结构的前馈神经网络(Feedforward Neural Networks)。
学习方法:梯度下降法。
输入层、隐含层(卷积层、池化层、全连接层)、输出层。
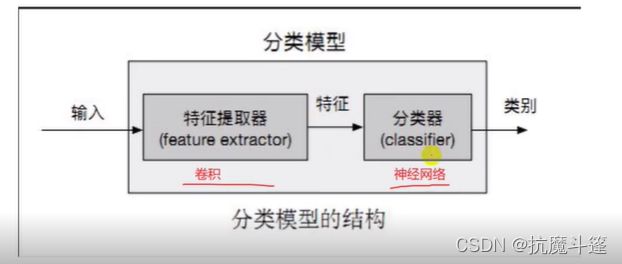
卷积层:卷积层的功能是对输入数据进行特征提取,其内部包含多个卷积核,组成卷积核的每个元素都对应一个权重系数和一个偏差量(bias vector),类似于一个前馈神经网络的神经元(neuron)。卷积也可以理解为一个特征提取器。
池化层:主要作用是下采样,通过去掉Feature Map中的不重要样本,进一步减少参数数量。
全连接层:卷积神经网络中的全连接层等价于传统前馈神经网络中的隐含层。特征图在全连接层中会失去空间拓扑结构,被展开为向量并通过激励函数。
实践
win安装
anaconda下安装yolo
1.下载yolov5
https://github.com/ultralytics/yolov5
2.创建环境:
anaconda 环境搭建,略。
anaconda prompt中:
创建以yolo为名称的新环境:
conda create -n yolo python=3.8
打开该环境:
activate yolo
进入到下载的yolo工程文件夹中
cmd操作:
E:\ cd #进入根文件夹
cd xxx #进入子文件夹
进入到下载的yolo工程文件夹中后:
pip install -r requirements.txt
安装完成即可。
3.权重下载
在https://github.com/ultralytics/yolov5/releases中下载4个权重文件,放到工程路径下的weights文件夹中。
4.测试
python detect.py --source 0 --weights=weights/yolov5s.pt (如果设备有摄像头)
linux安装
使用
自定义训练
参考:https://blog.csdn.net/qq_45701791/article/details/113992622
1.制作数据集
使用labellmg制作数据集。
过程略。
2.训练
python train.py --img 640 --batch 50 --epochs 100 --data /xxx/A.yaml --weights yolov5s.pt --nosave --cache
参数信息:
epochs 迭代次数
其中的 --data /xxx/A.yaml,A.yaml中标注了数据集的信息:
# train and val data as 1) directory: path/images/, 2) file: path/images.txt, or 3) list: [path1/images/, path2/images/]
train: ./yolo_A/images/ #若在本文件夹下,加入./
val: ./yolo_A/images/
# number of classes
nc: 1
# class names
names: ['Hand']
train、val为训练集和测试集的图片存放路径(这里用了一个集),labels路径自动识别。nc 类别数量,name 类别名称,与class.txt中信息一致。
打印坐标(像素)信息
detect.py中修改:
annotator.box_label()
参考:yolov5返回坐标
变量类型
label : str ; names[] : str ; conf : torch.Tensor
torch.Tensor()是Python类,更明确的说,是默认张量类型torch.FloatTensor()的别名,torch.Tensor([1,2]) 会调用Tensor类的构造函数__init__,生成单精度浮点类型的张量。
可以用python的索引和切片来获取和修改一个张量tensor中的内容:
>>> x = torch.FloatTensor([[1, 2, 3], [4, 5, 6]])
>>> print(x[1][2])
6.0
>>> x[0][1] = 8
>>> print(x)
1 8 3
4 5 6
[torch.FloatTensor of size 2x3]
结合ROS
问题:注意结合ros使用时注意ros节点的引入,尽量不要在yolo程序中定义引入ros节点,rospy.init_node(“”)后,程序循环易处理不当,将导致程序卡顿,无法ctrlC结束程序等问题。
解决办法1:使用参数服务器。
仅仅在yolo detect.py中使用参数服务器API,将识别得到的数据传入参数服务器中,供其他ros节点使用。