grid_map(四):simple demo学习
0、前言
接着下面链接的2.1 simple demo。grid_map(二):ubuntu16.04安装测试grid_map 1.6.0-1.6.2 https://blog.csdn.net/BIT_HXZ/article/details/122783924?spm=1001.2014.3001.5502
https://blog.csdn.net/BIT_HXZ/article/details/122783924?spm=1001.2014.3001.5502
simple demo简单演示由两部分组成,grid_map_demos 包里面的simple demo节点和 grid_map_visualization 包里面的grid_map_visualization节点。
simple_demo.launch如下:
1、simple_demo_node节点
文件地址在:
home/meng/grid_map_ws/src/grid_map/grid_map_demos/src/simple_demo_node.cpp注释后文件为
#include
#include
#include
#include
using namespace grid_map;
int main(int argc, char** argv)
{
// Initialize node and publisher.
ros::init(argc, argv, "grid_map_simple_demo");
ros::NodeHandle nh("~");
//参考grid_map_ws/src/grid_map/grid_map_msgs/msg/ 文件夹下的
//两个自定义消息类型理解,下面地图定义等部分同样需要参考
//发布话题:/grid_map_simple_demo/grid_map
ros::Publisher publisher = nh.advertise("grid_map", 1, true);
// Create grid map.
GridMap map({"elevation"});//创建栅格地图,图层layer名为elevation
map.setFrameId("map");
map.setGeometry(Length(1.2, 2.0), 0.03);//地图在x方向上1.2m,在y方向上2m,分辨率0.03m
//map.getLength().x():地图在x方向上长度, map.getLength().y():y方向上长度
//map.getSize()(0): x方向格子数 map.getSize()(1)):y方向格子数
ROS_INFO("Created map with size %f x %f m (%i x %i cells).",
map.getLength().x(), map.getLength().y(),
map.getSize()(0), map.getSize()(1));
// Work with grid map in a loop.
ros::Rate rate(30.0);
while (nh.ok()) {
// Add data to grid map.
ros::Time time = ros::Time::now();
//在for循环中使用迭代器,使用GridMapIterator迭代整个栅格地图
for (GridMapIterator it(map); !it.isPastEnd(); ++it) {
Position position;
map.getPosition(*it, position);//将迭代到的位置赋值给position
//toSec()把时间戳转化为浮点型格式,其定义如下:
//double toSec() const { return (double)sec + 1e-9*(double)nsec; };
//下面式子的公式为:栅格地图某位置的值=-0.04+0.2*sin(3t+5y)*x,即为变化的量
map.at("elevation", *it) = -0.04 + 0.2 * std::sin(3.0 * time.toSec() + 5.0 * position.y()) * position.x();
}
// Publish grid map.
//toNSec()转换为整型的纳秒,定义:
//uint64_t toNSec() const {return (uint64_t)sec*1000000000ull + (uint64_t)nsec; }
map.setTimestamp(time.toNSec());//设置时间戳
grid_map_msgs::GridMap message;
GridMapRosConverter::toMessage(map, message);//转化为ros消息
publisher.publish(message);
//ROS_INFO_THROTTLE输出频率日志,第一个参数interval代表以秒为单位的时间量,时间量指的是两个日志出现的最小时间间隔
ROS_INFO_THROTTLE(1.0, "Grid map (timestamp %f) published.", message.info.header.stamp.toSec());
// Wait for next cycle.
rate.sleep();
}
return 0;
}
2、grid_map_visualization节点配置文件
先看launch文件里面加载的配置文件,地址为:
/grid_map_ws/src/grid_map/grid_map_demos/config/simple_demo.yaml#需要被可视化的grid map话题名称,是订阅的话题
grid_map_topic: /grid_map_simple_demo/grid_map
#需要发布的话题,名称为:/grid_map_visualization/name,如/grid_map_visualization/elevation_points
grid_map_visualizations: #话题名前缀
- name: elevation_points #话题名后缀
type: point_cloud #话题类型
params:
layer: elevation #rviz显示的所在图层
#将栅格地图的一层可视化为占用栅格。
#使用layer参数指定要可视化的图层,并使用data_min和data_max指定上下限。
- name: elevation_grid
type: occupancy_grid
params:
layer: elevation
# data_min: 0.08 #默认
# data_max: -0.16
# data_min: 1 #试验1
# data_max: -1
data_min: -0.16 #试验2
data_max: 0.16
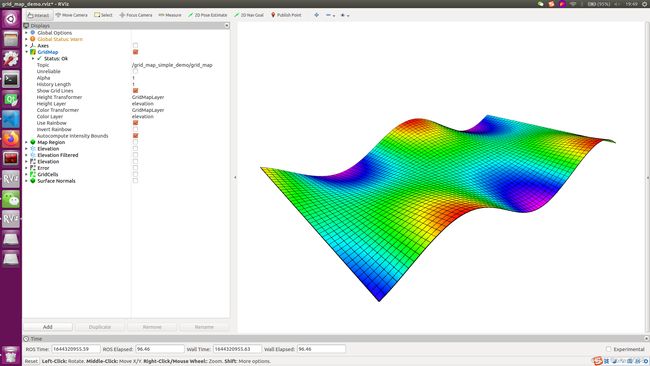
相应得到rviz效果图如下:
配置文件中订阅的话题为:(/grid_map_simple_demo/grid_map显示时大概是以颜色来表示不同的“高度”)
配置文件中发布的话题为:

3、grid_map_visualization节点启动
grid_map_visualization节点涉及的文件较多,参考grid_map_visualization包的CMakeLists.txt的生成可执行文件部分:
## Declare a cpp executable
add_executable(
${PROJECT_NAME}
src/grid_map_visualization_node.cpp
src/GridMapVisualization.cpp
src/GridMapVisualizationHelpers.cpp
src/visualizations/VisualizationBase.cpp
src/visualizations/VisualizationFactory.cpp
src/visualizations/PointCloudVisualization.cpp
src/visualizations/FlatPointCloudVisualization.cpp
src/visualizations/VectorVisualization.cpp
src/visualizations/OccupancyGridVisualization.cpp
src/visualizations/GridCellsVisualization.cpp
src/visualizations/MapRegionVisualization.cpp
)这时需要观察roslaunch 时终端打印输出内容,打开vscode搜索.
![]()
[ INFO] [1644322605.259528797]: Grid map visualization node started. ##这句可以搜索到
[ INFO] [1644322605.259742335]: Grid map (timestamp 1644322605.259412) published.
[ INFO] [1644322605.260908349]: grid_map_visualizations: Configured visualization of type 'point_cloud' with name 'elevation_points'.
[ INFO] [1644322605.260928369]: grid_map_visualizations: Configured visualization of type 'occupancy_grid' with name 'elevation_grid'.
[ INFO] [1644322605.261776145]: Grid map visualization initialized. ##这句可以搜索到
在vscode中可以直接搜索到“Grid map visualization node started”和“Grid map visualization initialized”这两句,分别在“--下面地址--”的25行和131行,其中“grid_map_visualizations: Configured visualization of type 'xx' with name 'xx'.”在118行。接下来就可以以GridMapVisualization.cpp文件为主要线索理解grid_map_visualization节点了
grid_map_ws/src/grid_map/grid_map_visualization/src/GridMapVisualization.cpp借由上面的“线索”,grid_map_visualization节点文件的执行顺序为:
1: grid_map_ws/src/grid_map/grid_map_visualization/src/grid_map_visualization_node.cpp
2: grid_map_ws/src/grid_map/grid_map_visualization/src/GridMapVisualization.cpp--未完--