- IPv6的创新与演进:从IP地址耗尽到下一代网络协议
IPv6的创新与演进:从IP地址耗尽到下一代网络协议背景简介随着计算机网络技术的飞速发展,互联网连接的设备数量呈指数级增长。在1984年,主机数量首次突破1000台大关,此时使用的IPv4协议凭借32位地址空间,还能应对网络的需求。然而,随着互联网的普及,越来越多的设备接入网络,IP地址耗尽成为了一个迫在眉睫的问题。为了解决这一危机,业界开始寻求新的解决方案,最终促成了IPv6(下一代互联网协议)
- 淘宝优惠券去哪里领?5大领取方法
好项目高省
大家好,我是万方,从事导购返利行业8年了。期间见证了无数平台崛起及各种套路,以及后来更多平台的倒闭和跑路。对于这个话题,今天我从一个内行的角度跟大家分享下,避免大家吃亏上当和走弯路。返利平台大概有这么几种类型:其一是社交电商导购类型,代表有:氧惠,高省,花生日记,蜜源,悦拜,美逛,高佣联盟,粉象生活,好省等;这种类型的平台从2017年出来后,几乎每年都有一些新平台出来。也是市面上目前最主流,用户群
- 2019年5月27~6月2日周检视
Jing0101
本周六开启218班3.0践行,伙伴们都很拚,要加油哦,不能拖集体的后腿!一、健康:跑步2次,两次步数过8000,勉强算运动三次达标吧。本周还是睡的太晚,早上有两次6点以前没能起来,精力不够。图片发自App二、家庭:本周四女儿学校举办1314最后一个儿童节的晚会,下午去学校帮忙,第一次参加戏曲节目的丫头表现不错,登台大方不紧张,女驸马的扮相也不错哦!图片发自App图片发自App周五重庆市首届少儿画展
- 你的能量就是你的磁场,带对了能量你也能做到“心想事成”
小苜蓿
“我是台视新闻主播,台大毕业的高材生,年轻貌美,开着名牌轿车,住在豪宅里面,又有个名人丈夫。任何人,只要有其中一项,就应该很很高兴了吧?为什么我如此不开心呢?”这是作者张德芬在《遇见未知的自己》这本书里写的,也是她二十五岁的自己。为什么在别人看起来很羡慕的她,不开心呢?也正是这个源头,她开始了改变,找到了问题的根源所在,慢慢地成为身心灵疗愈的作家。面对自己,首先要考虑的哲学问题是什么?《西游记》是
- LLM系统性学习完全指南(初学者必看系列)
GA琥珀
LLM学习人工智能语言模型
前言这篇文章将系统性的讲解LLM(LargeLanguageModels,LLM)的知识和应用。我们将从支撑整个领域的数学与机器学习基石出发,逐步剖析自然语言处理(NLP)的经典范式,深入探究引发革命的Transformer架构,并按时间顺序追溯从BERT、GPT-2到GPT-4、Llama及Gemini等里程碑式模型的演进。随后,我们将探讨如何将这些强大的基础模型转化为实用、安全的应用,涵盖对齐
- 世界总有真情在
哈哈巧克力
今天,和我的一个同事一起去采访了一个苦命的女人,了解她的故事。虽然已是春天,但这个星期依然有点寒冷,原本放在柜中的羽绒服,也被捞出来套在身上。尤其是今天还下着毛毛细雨,尤带着冬天的寒意。到了她上班的店里,她还在忙着。柜台站着一个小男孩,是那个妇女的儿子。同事汪洋上前,问他:“你妈妈呢?”那个小男孩回头冲后台大喊:“妈,有人找。”一个中年妇女从厨房后台走出来。她穿着藏青色的棉袄,家居型的那种,袖子套
- 【AI Infra】基础学习汇总篇
逆羽飘扬
AI基础知识人工智能学习
系列综述:目的:本系列是个人整理为了学习训练框架优化的,整理期间苛求每个知识点,平衡理解简易度与深入程度。来源:材料主要源于【DeepEP官方介绍】进行的,每个知识点的修正和深入主要参考各平台大佬的文章,其中也可能含有少量的个人实验自证。结语:如果有帮到你的地方,就点个赞和关注一下呗,谢谢!!!请先收藏!!!,后续继续完善和扩充(●’◡’●)文章目录一、分布式与并行基础分布式计算高性能并行GPU硬
- 蜂鸟云平台大更新:地图空间定价重塑与功能全面升级
蜂鸟视图fengmap
信息可视化蜂鸟云地图编辑器地图绘制工具室内外地图一体化智慧园区蜂鸟视图
1.引言随着云计算、大数据以及人工智能技术的快速发展,企业对云平台的需求日益增长。蜂鸟云平台作为一款创新性的地图服务平台,已逐渐成为众多企业、政府及科研机构的核心依赖。为了更好地满足用户需求,提高平台的市场竞争力,蜂鸟云平台定期进行功能更新与优化。2024年9月21日,蜂鸟云平台将在晚上20:00至24:00进行一轮重要的系统更新。本次更新的核心内容包括地图空间的重新定价与功能优化,涉及制图、微程
- 开发实践,通过融云 IM + Dify 实现 AI 机器人
融云
人工智能机器人
融云AI机器人上线,支持对接Dify平台,实现AI对话的上下文感知与智能响应。融云IM通过与Dify平台的深度无缝集成,打通了C端用户与大语言模型(LLM)之间的端到端对话链路,支持流式响应和多轮对话上下文,可广泛应用于AI陪伴、智能问答、内容生成等场景,助力开发者和企业构建流畅的智能交互体验。本文主要介绍如何基于融云IM平台集成AI机器人,并接入Dify平台大模型服务。整体架构工作流程:☑App
- MySQL读写分离技术详解:架构设计与实践指南
weixin_47233946
数据库mysql数据库
##引言在互联网业务高并发场景下,单数据库实例往往难以支撑海量的读写请求。某电商平台大促期间数据库QPS突破10万次/秒的案例表明,仅依赖单一数据库实例进行读写操作已成为性能瓶颈。MySQL读写分离技术通过将读操作与写操作路由到不同节点,能够显著提升数据库集群的处理能力。##一、读写分离核心原理###1.1核心机制基于MySQL原生复制技术构建主从架构:-**主库(Master)**:处理所有写操
- 输入4个整数,按从大到小的顺序输出这四个数
yaoyao451
c算法
/**Copyright(c)2011,烟台大学计算机学院*Allrightsreserved.*文件名称:test.cpp*作者:*完成日期:2012年10月14日*版本号:v1.0**输入描述:无*问题描述:输入4个整数,按从大到小的顺序输出这四个数*程序输出:“按从大到小的顺序输出这四个数”*问题分析:略*算法设计:略#includeusingnamespacestd;intmain(){i
- 计算机在高分子材料与工程中的应用,计算机技术在高分子材料工程中的应用.doc...
宇宙探奇
计算机技术在高分子材料工程中的应用计算机技术在高分子材料与工程中的应用化112-2201169502225田新计算机技术在高分子材料与工程中的应用田新烟台大学化学化工学院摘要:介绍了计算机信息系统、计算机辅助系统、计算机控制系统在高聚物研究中的应用概况,详述了计算机仿真技术在此领域中的应用及其研究进展。计算机技术在材料科学研究中应用领域。探讨计算机在材料科学研究领域中的具体应用。借助于计算机可推动
- 计算机在高分子材料中的应用软件,计算机技术在高分子材料工程中的应用(10页)-原创力文档...
密之山人
计算机在高分子材料中的应用软件
计算机技术在高分子材料与工程中的应用化112-2201169502225田新计算机技术在高分子材料与工程中的应用田新烟台大学化学化工学院摘要:介绍了计算机信息系统、计算机辅助系统、计算机控制系统在高聚物研究中的应用概况,详述了计算机仿真技术在此领域中的应用及其研究进展。计算机技术在材料科学研究中应用领域。探讨计算机在材料科学研究领域中的具体应用。借助于计算机可推动材料研究、开发与应用。关键词计算机
- laya3的2d相机与2d区域
crazy_yun
Layalayabox3
2d相机和2d区域都继承自Sprite。2d相机必须作为2d区域的子节点,且2d相机必须勾选isMain才能正常使用。2d区域下如果没有主相机,则他和Sprite无异,他的主要操作皆是针对主相机。2d相机可以调整自己的移动范围,是否紧密跟随,是否平滑移动等。2d区域无论移动到哪,场景中都会显示以2d相机为中心,舞台大小区域范围内的2d区域节点下的物品。(自我测试发现,与laya现行文档不符,之后文
- IBM DB2基础知识学习作业
阿柠xn
数据库数据库db2oracle
IBMdb2与oracle一样都是后台大型数据库,在我国许多银行的后台服务器都是db2。db2的PENDING状态backuppending状态:是在修改数据库的日志模式所导致的;解决方法是对数据库再做一次备份。setintegritypending状态:是在load过程中,我们装载的数据发生违反参照完整性约束的行,导致表无法使用;结局方法:运行脚本:setintegrityfor表名immedi
- 【EI会议征稿】2025图像处理和深度学习国际学术会议(IPDL 2025)
学术科研小助手
图像处理深度学习人工智能
重要信息时间:2025年4月11-13日大会地点:中国-成都首轮截稿:2024年12月31日接受/拒稿通知:投稿后约3~8天收录检索:EICompendex,Scopus点击查看会议主页:2025图像处理和深度学习国际学术会议(IPDL2025)_艾思科蓝_学术一站式服务平台大会介绍随着深度学习和图像处理技术的迅速发展,相关技术的应用逐渐渗透到各个行业,如医疗影像分析、自动驾驶、安防监控和智能制造
- .NET Core 1.0发布:微软开源跨平台大布局序幕
dotNET跨平台
在6月27日的红帽DevNation峰会上,微软正式发布了.NETCore1.0、ASP.NET1.0和EntityFrameworkCore1.0,这些产品将全部支持Windows、OSX和Linux三种操作系统。其中.NETCore最受瞩目,这是一款跨平台、开源且模块化的.NET平台,可以用来搭建web应用、微服务、创立应用库和控制台。本次发布的包括.NETCoreRuntime、框架库及相关
- 基于深度强化学习的网约车动态路径规划
罗伯特之技术屋
行业数字化研究及信息化建设专栏智能科学与技术专栏java开发语言
摘要随着移动互联网的快速发展,许多利用手机App打车的网约车平台也应运而生.这些网约车平台大大减少了网约车的空驶时间和乘客等待时间,从而提高了交通效率.作为平台核心模块,网约车路径规划问题致力于调度空闲的网约车以服务潜在的乘客,从而提升平台的运营效率,近年来受到广泛关注.现有研究主要采用基于值函数的深度强化学习算法(如deepQ-network,DQN)来解决这一问题.然而,由于基于值函数的方法存
- 企业开发平台大变革:AI 代理 + 平台工程重构数字化转型路径
Lowcode002
人工智能编辑器云计算
在企业数字化转型的浪潮中,开发平台正经历着前所未有的技术革命。从AST(抽象语法树)到AI驱动的智能开发,从微服务架构到信创适配,这场变革不仅重塑了软件开发的底层逻辑,更催生了全新的生产力范式。本文将深度解析2025年企业开发平台的六大核心趋势,为企业决策者提供战略级技术洞察。一、技术架构革命:AST与微前端重构开发逻辑企业数字化转型的技术难点在技术架构层面,企业数字化转型面临多重挑战:技术栈迁移
- 【linux运维】vim基础应用
逆羽飘扬
Linux运维linux运维vim
系列综述:目的:本系列是个人整理为了学习基本的shell编程和linux命令,整理期间苛求每个知识点,平衡理解简易度与深入程度。来源:材料主要源于b站大学——linux运维课程进行的,每个知识点的修正和深入主要参考各平台大佬的文章,其中也可能含有少量的个人实验自证。结语:如果有帮到你的地方,就点个赞和关注一下呗,谢谢!!!文章目录vim概述基础知识命令模式操作末行模式操作使用技巧参考博客点此到文末
- 网上咋打印?网上打印资料文件的平台有哪些
xiaocao_1023
云打印小程序华为
第一次在网上打印时,很多人不知道网上咋打印?网上打印其实可以给大家省去很多寻找打印店的时间,而且很多网上打印的操作流程也比较便捷,面对众多的网上打印平台该怎么选择呢?网上打印资料文件的平台是比较多的,大家在网上搜索关于打印的店铺,大家可以找到很多,但是对于第一次在网上打印的人群,还是力荐大家选择一些操作流程简便,且发货速度快的打印平台,这样的平台大家可以到易桌面打印室进行打印。易桌面打印室是一个专
- AI Agent
Andre-S
人工智能人工智能
李宏毅:从零开始搞懂AIAgent-知乎台大李宏毅2025AIAgent新课来了!-知乎读懂AIAgent:基于大模型的人工智能代理-知乎1.什么是AIAgent一个基于大模型的AIAgent系统可以拆分为大模型、规划、记忆与工具使用四个组件部分。AIAgent可能会成为新时代的开端,其基础架构可以简单划分为Agent=LLM+规划技能+记忆+工具使用,其中LLM扮演了Agent的“大脑”,在这个
- 百亿量化私募高薪急招C++! 春招/校招/社招,21/22
愤怒的小青春
java
京东运维vs去哪儿java确实是职业道路的选择,不少人都说有开发选开发,考虑的几点有:1.京东平台大很多,去哪儿感觉算鉴智机器人毁意向特地为了这个公司拒了一个别的公司的offer,之前公司的那个hr还跟我说没问题的,走完审批就能发of许愿许愿!孩子真的累了www许愿许愿!孩子真的累了wwwoffer选择,兄弟萌背景本科双一流,硕士末流211,电子信息专业。选择去中航光电拧螺丝还是去中下985读博啊
- 语言策略的博弈论新境界:从对话到平衡——大语言模型的博弈解构与前瞻
步子哥
AGI通用人工智能语言模型人工智能自然语言处理
在人工智能日新月异的发展中,我们常见到一台台大语言模型(LLM)在聊天、问答与创作中大放异彩。然而,在这些机智回答的背后,却隐藏着一个尚未充分挖掘的秘密:对话不仅仅是文字的堆砌,更是一场复杂的多主体战略博弈。最新研究《StatesasStringsasStrategies:SteeringLanguageModelswithGame-TheoreticSolvers》正是尝试将对话过程映射为博弈论
- 普通人系统学习AI的路径与应用指南
奋斗中的小猩猩
AI探索学习人工智能
普通人系统学习AI的路径与应用指南一、为什么普通人应该学习AI?技术平民化趋势:AutoML、低代码平台大幅降低学习门槛行业渗透率:AI已覆盖医疗/教育/金融/制造等主要领域职业竞争力:LinkedIn数据显示AI技能需求年增长74%创新可能性:个人开发者也能做出百万用户级AI应用二、系统学习路径(6个月计划)阶段1:基础筑基(1-2个月)数学基础线性代数/统计学基础Python编程NumPy/P
- 程序化广告行业(14/89):DSP供应商评估、服务模式与常见平台
lilye66
程序化广告前端搜索引擎大数据mongodb
程序化广告行业(14/89):DSP供应商评估、服务模式与常见平台大家好!在探索程序化广告行业的道路上,我积累了不少知识,今天就想和大家一起分享,共同学习进步。这篇文章主要围绕需求方平台(DSP)供应商展开,深入剖析如何评估供应商、不同的服务模式,以及常见的独立第三方平台。一、DSP供应商的评估要点选择合适的DSP供应商对广告投放的成功至关重要。在评估DSP供应商时,需要综合考量多个关键因素。流量
- 国家网络安全通报中心:大模型工具Ollama存在安全风险
鹿鸣天涯
DeepSeek学习入门安全web安全deepseek
国家网络安全通报中心:大模型工具Ollama存在安全风险3月3日,国家网络安全通报中心发布关于大模型工具Ollama存在安全风险的情况通报,内容如下:据清华大学网络空间测绘联合研究中心分析,开源跨平台大模型工具Ollama默认配置存在未授权访问与模型窃取等安全隐患。鉴于目前DeepSeek等大模型的研究部署和应用非常广泛,多数用户使用Ollama私有化部署且未修改默认配置,存在数据泄露、算力盗取、
- 关于大模型工具 Ollama 存在安全风险的情况通报
不是太高的手
安全
据清华大学网络空间测绘联合研究中心分析,开源跨平台大模型工具Ollama默认配置存在未授权访问与模型窃取等安全隐患。鉴于目前DeepSeek等大模型的研究部署和应用非常广泛,多数用户使用Ollama私有化部署且未修改默认配置,存在数据泄露、算力盗取、服务中断等安全风险,极易引发网络和数据安全事件。一、风险隐患详情使用Ollma在本地部署DeepSeek等大模型时,会在本地启动一个Web服务,并默认
- 开源跨平台大模型工具Ollama的安全隐患
X.Cristiano
AI新闻Ollama漏洞大模型
源跨平台大模型工具Ollama的安全隐患及应对策略在当今数字化飞速发展的时代,人工智能技术尤其是大模型的应用已经渗透到我们生活的方方面面。从智能家居到医疗健康,从金融风控到教育娱乐,大模型为各个领域带来了前所未有的便利和创新。然而,随着技术的进步,安全问题也日益凸显。近期,清华大学网络空间测绘联合研究中心发布了一则关于开源跨平台大模型工具Ollama的安全通报,揭示了其默认配置中存在的严重安全隐患
- 关于大模型工具Ollama存在潜在安全风险的情况通报
网友阿贵
漏洞修复安全web安全
关于Ollama默认配置安全风险的通告来源:国家网络与信息安全信息通报中心近期,清华大学网络空间测绘联合研究中心分析发现,开源跨平台大模型工具Ollama在默认配置下存在未授权访问与模型窃取等严重安全隐患。鉴于当前DeepSeek等大模型的广泛研究、部署和应用,多数用户在使用Ollama进行私有化部署时未修改默认配置,导致数据泄露、算力盗取、服务中断等安全风险,极易引发网络和数据安全事件。现将相关
- 如何用ruby来写hadoop的mapreduce并生成jar包
wudixiaotie
mapreduce
ruby来写hadoop的mapreduce,我用的方法是rubydoop。怎么配置环境呢:
1.安装rvm:
不说了 网上有
2.安装ruby:
由于我以前是做ruby的,所以习惯性的先安装了ruby,起码调试起来比jruby快多了。
3.安装jruby:
rvm install jruby然后等待安
- java编程思想 -- 访问控制权限
百合不是茶
java访问控制权限单例模式
访问权限是java中一个比较中要的知识点,它规定者什么方法可以访问,什么不可以访问
一:包访问权限;
自定义包:
package com.wj.control;
//包
public class Demo {
//定义一个无参的方法
public void DemoPackage(){
System.out.println("调用
- [生物与医学]请审慎食用小龙虾
comsci
生物
现在的餐馆里面出售的小龙虾,有一些是在野外捕捉的,这些小龙虾身体里面可能带有某些病毒和细菌,人食用以后可能会导致一些疾病,严重的甚至会死亡.....
所以,参加聚餐的时候,最好不要点小龙虾...就吃养殖的猪肉,牛肉,羊肉和鱼,等动物蛋白质
- org.apache.jasper.JasperException: Unable to compile class for JSP:
商人shang
maven2.2jdk1.8
环境: jdk1.8 maven tomcat7-maven-plugin 2.0
原因: tomcat7-maven-plugin 2.0 不知吃 jdk 1.8,换成 tomcat7-maven-plugin 2.2就行,即
<plugin>
- 你的垃圾你处理掉了吗?GC
oloz
GC
前序:本人菜鸟,此文研究学习来自网络,各位牛牛多指教
1.垃圾收集算法的核心思想
Java语言建立了垃圾收集机制,用以跟踪正在使用的对象和发现并回收不再使用(引用)的对象。该机制可以有效防范动态内存分配中可能发生的两个危险:因内存垃圾过多而引发的内存耗尽,以及不恰当的内存释放所造成的内存非法引用。
垃圾收集算法的核心思想是:对虚拟机可用内存空间,即堆空间中的对象进行识别
- shiro 和 SESSSION
杨白白
shiro
shiro 在web项目里默认使用的是web容器提供的session,也就是说shiro使用的session是web容器产生的,并不是自己产生的,在用于非web环境时可用其他来源代替。在web工程启动的时候它就和容器绑定在了一起,这是通过web.xml里面的shiroFilter实现的。通过session.getSession()方法会在浏览器cokkice产生JESSIONID,当关闭浏览器,此
- 移动互联网终端 淘宝客如何实现盈利
小桔子
移動客戶端淘客淘寶App
2012年淘宝联盟平台为站长和淘宝客带来的分成收入突破30亿元,同比增长100%。而来自移动端的分成达1亿元,其中美丽说、蘑菇街、果库、口袋购物等App运营商分成近5000万元。 可以看出,虽然目前阶段PC端对于淘客而言仍旧是盈利的大头,但移动端已经呈现出爆发之势。而且这个势头将随着智能终端(手机,平板)的加速普及而更加迅猛
- wordpress小工具制作
aichenglong
wordpress小工具
wordpress 使用侧边栏的小工具,很方便调整页面结构
小工具的制作过程
1 在自己的主题文件中新建一个文件夹(如widget),在文件夹中创建一个php(AWP_posts-category.php)
小工具是一个类,想侧边栏一样,还得使用代码注册,他才可以再后台使用,基本的代码一层不变
<?php
class AWP_Post_Category extends WP_Wi
- JS微信分享
AILIKES
js
// 所有功能必须包含在 WeixinApi.ready 中进行
WeixinApi.ready(function(Api) {
// 微信分享的数据
var wxData = {
&nb
- 封装探讨
百合不是茶
JAVA面向对象 封装
//封装 属性 方法 将某些东西包装在一起,通过创建对象或使用静态的方法来调用,称为封装;封装其实就是有选择性地公开或隐藏某些信息,它解决了数据的安全性问题,增加代码的可读性和可维护性
在 Aname类中申明三个属性,将其封装在一个类中:通过对象来调用
例如 1:
//属性 将其设为私有
姓名 name 可以公开
- jquery radio/checkbox change事件不能触发的问题
bijian1013
JavaScriptjquery
我想让radio来控制当前我选择的是机动车还是特种车,如下所示:
<html>
<head>
<script src="http://ajax.googleapis.com/ajax/libs/jquery/1.7.1/jquery.min.js" type="text/javascript"><
- AngularJS中安全性措施
bijian1013
JavaScriptAngularJS安全性XSRFJSON漏洞
在使用web应用中,安全性是应该首要考虑的一个问题。AngularJS提供了一些辅助机制,用来防护来自两个常见攻击方向的网络攻击。
一.JSON漏洞
当使用一个GET请求获取JSON数组信息的时候(尤其是当这一信息非常敏感,
- [Maven学习笔记九]Maven发布web项目
bit1129
maven
基于Maven的web项目的标准项目结构
user-project
user-core
user-service
user-web
src
- 【Hive七】Hive用户自定义聚合函数(UDAF)
bit1129
hive
用户自定义聚合函数,用户提供的多个入参通过聚合计算(求和、求最大值、求最小值)得到一个聚合计算结果的函数。
问题:UDF也可以提供输入多个参数然后输出一个结果的运算,比如加法运算add(3,5),add这个UDF需要实现UDF的evaluate方法,那么UDF和UDAF的实质分别究竟是什么?
Double evaluate(Double a, Double b)
- 通过 nginx-lua 给 Nginx 增加 OAuth 支持
ronin47
前言:我们使用Nginx的Lua中间件建立了OAuth2认证和授权层。如果你也有此打算,阅读下面的文档,实现自动化并获得收益。SeatGeek 在过去几年中取得了发展,我们已经积累了不少针对各种任务的不同管理接口。我们通常为新的展示需求创建新模块,比如我们自己的博客、图表等。我们还定期开发内部工具来处理诸如部署、可视化操作及事件处理等事务。在处理这些事务中,我们使用了几个不同的接口来认证:
&n
- 利用tomcat-redis-session-manager做session同步时自定义类对象属性保存不上的解决方法
bsr1983
session
在利用tomcat-redis-session-manager做session同步时,遇到了在session保存一个自定义对象时,修改该对象中的某个属性,session未进行序列化,属性没有被存储到redis中。 在 tomcat-redis-session-manager的github上有如下说明: Session Change Tracking
As noted in the &qu
- 《代码大全》表驱动法-Table Driven Approach-1
bylijinnan
java算法
关于Table Driven Approach的一篇非常好的文章:
http://www.codeproject.com/Articles/42732/Table-driven-Approach
package com.ljn.base;
import java.util.Random;
public class TableDriven {
public
- Sybase封锁原理
chicony
Sybase
昨天在操作Sybase IQ12.7时意外操作造成了数据库表锁定,不能删除被锁定表数据也不能往其中写入数据。由于着急往该表抽入数据,因此立马着手解决该表的解锁问题。 无奈此前没有接触过Sybase IQ12.7这套数据库产品,加之当时已属于下班时间无法求助于支持人员支持,因此只有借助搜索引擎强大的
- java异常处理机制
CrazyMizzz
java
java异常关键字有以下几个,分别为 try catch final throw throws
他们的定义分别为
try: Opening exception-handling statement.
catch: Captures the exception.
finally: Runs its code before terminating
- hive 数据插入DML语法汇总
daizj
hiveDML数据插入
Hive的数据插入DML语法汇总1、Loading files into tables语法:1) LOAD DATA [LOCAL] INPATH 'filepath' [OVERWRITE] INTO TABLE tablename [PARTITION (partcol1=val1, partcol2=val2 ...)]解释:1)、上面命令执行环境为hive客户端环境下: hive>l
- 工厂设计模式
dcj3sjt126com
设计模式
使用设计模式是促进最佳实践和良好设计的好办法。设计模式可以提供针对常见的编程问题的灵活的解决方案。 工厂模式
工厂模式(Factory)允许你在代码执行时实例化对象。它之所以被称为工厂模式是因为它负责“生产”对象。工厂方法的参数是你要生成的对象对应的类名称。
Example #1 调用工厂方法(带参数)
<?phpclass Example{
- mysql字符串查找函数
dcj3sjt126com
mysql
FIND_IN_SET(str,strlist)
假如字符串str 在由N 子链组成的字符串列表strlist 中,则返回值的范围在1到 N 之间。一个字符串列表就是一个由一些被‘,’符号分开的自链组成的字符串。如果第一个参数是一个常数字符串,而第二个是type SET列,则 FIND_IN_SET() 函数被优化,使用比特计算。如果str不在strlist 或st
- jvm内存管理
easterfly
jvm
一、JVM堆内存的划分
分为年轻代和年老代。年轻代又分为三部分:一个eden,两个survivor。
工作过程是这样的:e区空间满了后,执行minor gc,存活下来的对象放入s0, 对s0仍会进行minor gc,存活下来的的对象放入s1中,对s1同样执行minor gc,依旧存活的对象就放入年老代中;
年老代满了之后会执行major gc,这个是stop the word模式,执行
- CentOS-6.3安装配置JDK-8
gengzg
centos
JAVA_HOME=/usr/java/jdk1.8.0_45
JRE_HOME=/usr/java/jdk1.8.0_45/jre
PATH=$PATH:$JAVA_HOME/bin:$JRE_HOME/bin
CLASSPATH=.:$JAVA_HOME/lib/dt.jar:$JAVA_HOME/lib/tools.jar:$JRE_HOME/lib
export JAVA_HOME
- 【转】关于web路径的获取方法
huangyc1210
Web路径
假定你的web application 名称为news,你在浏览器中输入请求路径: http://localhost:8080/news/main/list.jsp 则执行下面向行代码后打印出如下结果: 1、 System.out.println(request.getContextPath()); //可返回站点的根路径。也就是项
- php里获取第一个中文首字母并排序
远去的渡口
数据结构PHP
很久没来更新博客了,还是觉得工作需要多总结的好。今天来更新一个自己认为比较有成就的问题吧。 最近在做储值结算,需求里结算首页需要按门店的首字母A-Z排序。我的数据结构原本是这样的:
Array
(
[0] => Array
(
[sid] => 2885842
[recetcstoredpay] =&g
- java内部类
hm4123660
java内部类匿名内部类成员内部类方法内部类
在Java中,可以将一个类定义在另一个类里面或者一个方法里面,这样的类称为内部类。内部类仍然是一个独立的类,在编译之后内部类会被编译成独立的.class文件,但是前面冠以外部类的类名和$符号。内部类可以间接解决多继承问题,可以使用内部类继承一个类,外部类继承一个类,实现多继承。
&nb
- Caused by: java.lang.IncompatibleClassChangeError: class org.hibernate.cfg.Exten
zhb8015
maven pom.xml关于hibernate的配置和异常信息如下,查了好多资料,问题还是没有解决。只知道是包冲突,就是不知道是哪个包....遇到这个问题的分享下是怎么解决的。。
maven pom:
<dependency>
<groupId>org.hibernate</groupId>
<ar
- Spark 性能相关参数配置详解-任务调度篇
Stark_Summer
sparkcachecpu任务调度yarn
随着Spark的逐渐成熟完善, 越来越多的可配置参数被添加到Spark中来, 本文试图通过阐述这其中部分参数的工作原理和配置思路, 和大家一起探讨一下如何根据实际场合对Spark进行配置优化。
由于篇幅较长,所以在这里分篇组织,如果要看最新完整的网页版内容,可以戳这里:http://spark-config.readthedocs.org/,主要是便
- css3滤镜
wangkeheng
htmlcss
经常看到一些网站的底部有一些灰色的图标,鼠标移入的时候会变亮,开始以为是js操作src或者bg呢,搜索了一下,发现了一个更好的方法:通过css3的滤镜方法。
html代码:
<a href='' class='icon'><img src='utv.jpg' /></a>
css代码:
.icon{-webkit-filter: graysc
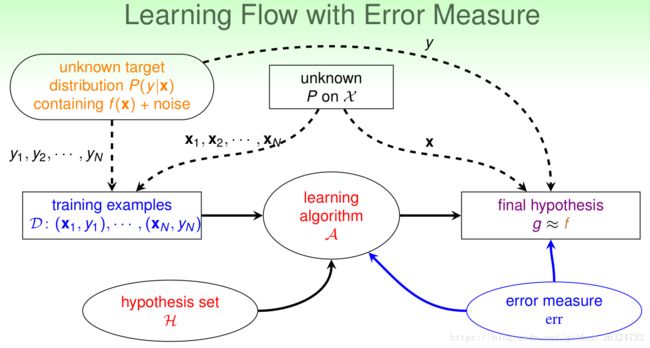
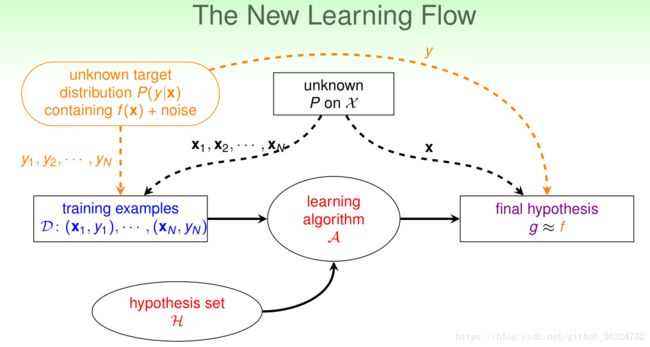
 。下面的图继续用罐中抽小球的例子来解释(i.i.d.是指独立同分布)——
。下面的图继续用罐中抽小球的例子来解释(i.i.d.是指独立同分布)——
 。
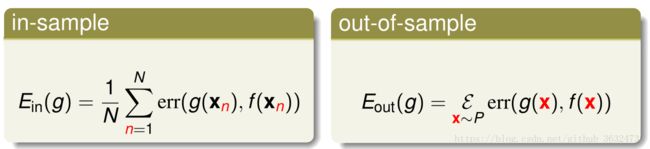
。 则是Target Distribution的一个特例:
则是Target Distribution的一个特例:
 与理想的
与理想的 和
和 的point wise error表达式如下——
的point wise error表达式如下——